") 直流無(wú)刷電機(jī)通過(guò)反電動(dòng)勢(shì)獲取換相表方法
直流無(wú)刷電機(jī)通過(guò)反電動(dòng)勢(shì)獲取換相表方法
一、分析前提條件
通過(guò)霍爾傳感器進(jìn)行電機(jī)的逆時(shí)針(CCW)/順時(shí)針(CW)換相旋轉(zhuǎn),然后通過(guò)示波器進(jìn)行波形抓取分析。
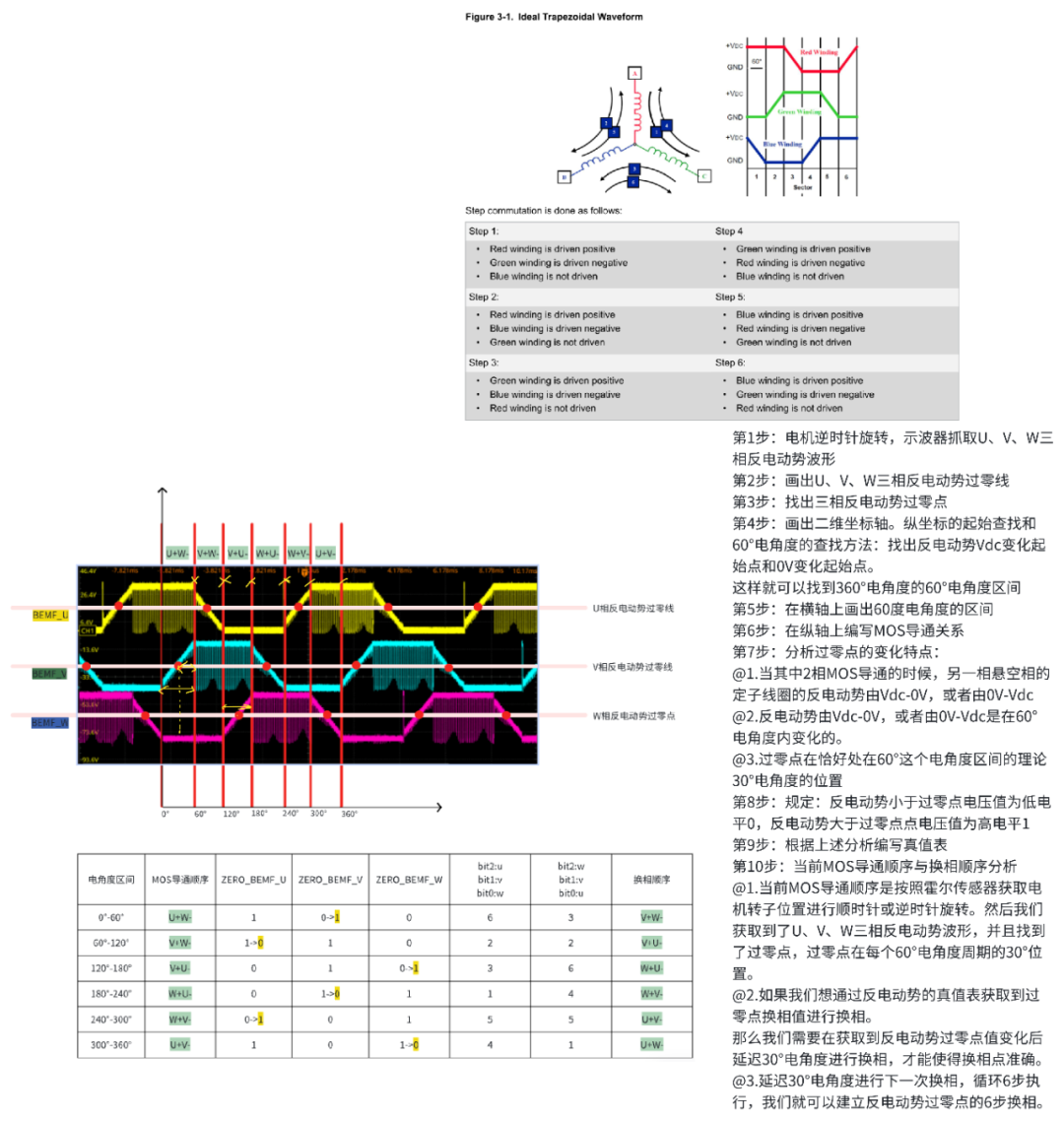
二、電機(jī)逆時(shí)針(CCW)旋轉(zhuǎn)分析
6步換相表實(shí)現(xiàn):
三、電機(jī)順時(shí)針(CW)旋轉(zhuǎn)分析
6步換相表實(shí)現(xiàn):
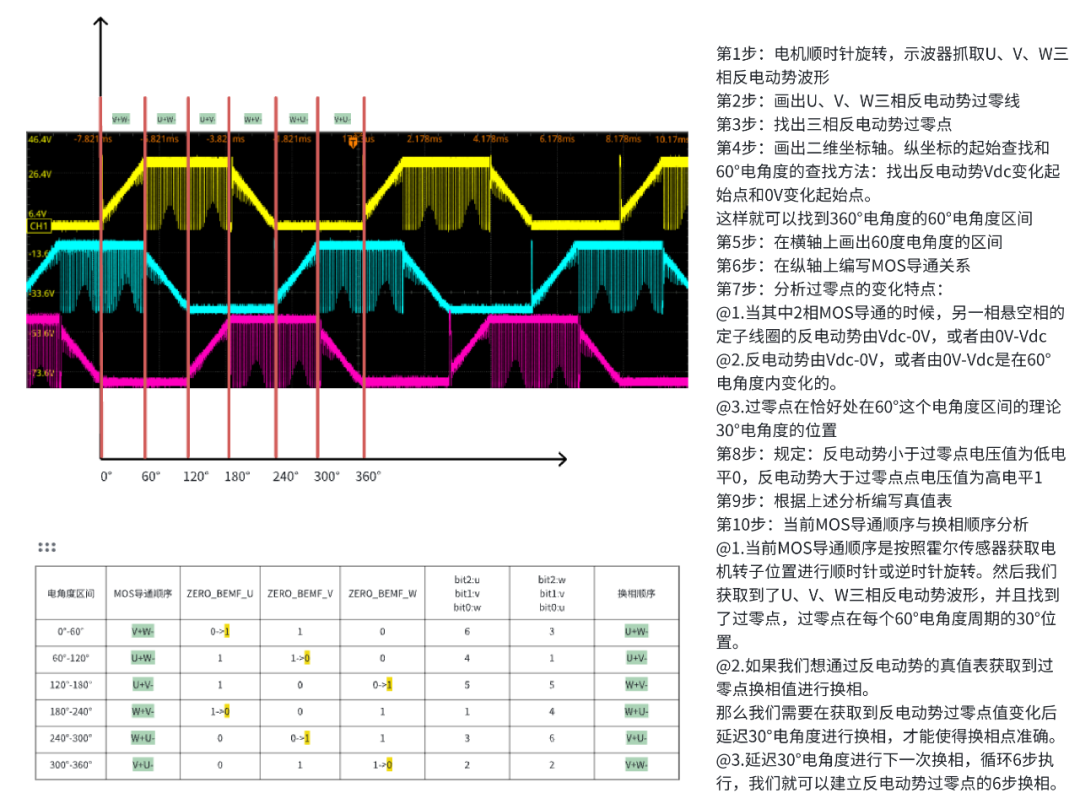
四、軟件算法上需要做30度補(bǔ)償原因分析
過(guò)零點(diǎn)是60度電角度周期內(nèi)理論30°換相點(diǎn)
延遲30°電角度時(shí)間換相才是MOS的真實(shí)理論換相點(diǎn)
算法上做30°電角度補(bǔ)償?shù)哪康氖鞘沟脫Q相點(diǎn)更加準(zhǔn)確,使得定子和轉(zhuǎn)子位置始終維持60°-120°電角度區(qū)間。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
傳感器
+關(guān)注
關(guān)注
2548文章
50664瀏覽量
751939 -
直流無(wú)刷電機(jī)
+關(guān)注
關(guān)注
15文章
297瀏覽量
23809 -
換相表
+關(guān)注
關(guān)注
0文章
3瀏覽量
8557
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
直流無(wú)刷電機(jī)直接反電動(dòng)勢(shì)檢測(cè)
一種無(wú)刷直流電機(jī)的反電動(dòng)勢(shì)過(guò)零檢測(cè)方法
發(fā)表于 01-29 17:23
直流無(wú)刷電機(jī)反電動(dòng)勢(shì)
直流無(wú)刷電機(jī)反電動(dòng)勢(shì)為什么是梯形波?轉(zhuǎn)子旋轉(zhuǎn)時(shí),相當(dāng)于線圈切割磁感線產(chǎn)生反電動(dòng)勢(shì),但是線圈左右兩側(cè)不應(yīng)該產(chǎn)生相同方向反電動(dòng)勢(shì)嗎?不是相互抵消
發(fā)表于 01-29 22:53
STM32 BLDC反電動(dòng)勢(shì)控制
我首先是根據(jù)霍爾信號(hào)驅(qū)動(dòng)的電機(jī)電機(jī)轉(zhuǎn)起來(lái)后檢測(cè)的反電動(dòng)勢(shì)測(cè)的三個(gè)霍爾信號(hào)均正常但檢測(cè)到的反電動(dòng)勢(shì)有兩相是正常的還有一項(xiàng)占空比特別大麻煩幫我分析一下可能是什么原因?qū)е碌模咳f(wàn)分感謝上面的是
發(fā)表于 05-04 09:35
請(qǐng)問(wèn)BLDC無(wú)刷電機(jī)反電動(dòng)勢(shì)電路不加電容有什么檢測(cè)方法?
電路采用比較器法檢測(cè)反電動(dòng)勢(shì)。現(xiàn)在反電動(dòng)勢(shì)檢測(cè)電路加了電容能從開(kāi)環(huán)切入到自動(dòng)換相。但是反電動(dòng)勢(shì)電路不加濾波電容,就無(wú)法正常切換了。求助,
發(fā)表于 06-28 00:39
無(wú)刷直流電機(jī)中反電動(dòng)勢(shì)的定義
降可通過(guò)從供電電壓中減去反電動(dòng)勢(shì)值算出。使用反電動(dòng)勢(shì)常數(shù)設(shè)計(jì)電機(jī)的方法如下:當(dāng)電機(jī)以額定轉(zhuǎn)速運(yùn)行
發(fā)表于 12-10 15:22
傳統(tǒng)反電動(dòng)勢(shì)檢測(cè)與換相控制檢測(cè)電路優(yōu)劣點(diǎn)比較分析
,目前永磁無(wú)刷直流電機(jī)無(wú)位置傳感器控制研究的核心和關(guān)鍵就是架構(gòu)一轉(zhuǎn)子位置信號(hào)檢測(cè)線路,從軟硬件兩個(gè)方面來(lái)間接獲得可靠的轉(zhuǎn)子位置信號(hào),借以觸發(fā)導(dǎo)通相應(yīng)的功率器件,驅(qū)動(dòng)電機(jī)運(yùn)轉(zhuǎn)。1 、傳統(tǒng)反電動(dòng)勢(shì)檢測(cè)
發(fā)表于 07-02 07:00
【原創(chuàng)分享】如何用Simulink仿真BLDC反電動(dòng)勢(shì)波形?
大家好,今天這篇文章跟大家分享如何使用MATLAB中的Simulink來(lái)仿真觀察直流無(wú)刷電機(jī)的反電動(dòng)勢(shì)波形。在正式仿真之前,我們先大致了解下BLDC和PMSM電機(jī)的
發(fā)表于 06-09 13:52
【原創(chuàng)分享】實(shí)際測(cè)量三相直流無(wú)刷電機(jī)反電動(dòng)勢(shì)波形
講解整個(gè)從拿到一個(gè)新電機(jī),到測(cè)量反電動(dòng)勢(shì)波形,再到確定繞組的通電順序,最后利用驅(qū)動(dòng)板驗(yàn)證我們的測(cè)試全流程實(shí)戰(zhàn)過(guò)程。也期望通過(guò)這幾期的內(nèi)容分享讓大家掌握這種方法,為以后的項(xiàng)目開(kāi)發(fā)節(jié)省時(shí)間
發(fā)表于 06-21 22:32
【原創(chuàng)】實(shí)際測(cè)量三相直流無(wú)刷電機(jī)反電動(dòng)勢(shì)波形
本帖最后由 松山歸人 于 2021-7-7 14:03 編輯
大家好!特邀趙云老師為大家講解實(shí)際測(cè)量三相直流無(wú)刷電機(jī)反電動(dòng)勢(shì)波形。希望對(duì)大家學(xué)習(xí)有所幫助,請(qǐng)持續(xù)關(guān)注,我們會(huì)繼續(xù)更
發(fā)表于 06-25 16:20
如何對(duì)無(wú)刷電機(jī)的反電動(dòng)勢(shì)過(guò)零進(jìn)行檢測(cè)?
怎樣去計(jì)算無(wú)刷電機(jī)的反電動(dòng)勢(shì)?如何對(duì)無(wú)刷電機(jī)的反電動(dòng)勢(shì)過(guò)零進(jìn)行檢測(cè)?
發(fā)表于 07-21 07:36
如何去檢測(cè)無(wú)刷電機(jī)的反電動(dòng)勢(shì)?有哪些方法?
為什么無(wú)感方案電機(jī)的啟動(dòng)如此困難?如何去檢測(cè)無(wú)刷電機(jī)的反電動(dòng)勢(shì)?有哪些方法?無(wú)感無(wú)刷直流電機(jī)(BLDC)最經(jīng)典的驅(qū)動(dòng)方式是什么?
發(fā)表于 07-26 13:05
無(wú)刷直流電機(jī)無(wú)感控制仿真的反電動(dòng)勢(shì)法介紹
和線反電動(dòng)勢(shì)對(duì)無(wú)刷直流電機(jī)無(wú)感控制進(jìn)行分析,是可以實(shí)現(xiàn)的并有助于理解電機(jī)控制。 相反電動(dòng)勢(shì)過(guò)零點(diǎn)后需要延遲30度電角度再換
發(fā)表于 04-04 15:15
請(qǐng)問(wèn)反電動(dòng)勢(shì)無(wú)感無(wú)刷電機(jī)啟動(dòng)應(yīng)該注意什么問(wèn)題?
電機(jī)切換成自動(dòng)換相后馬上就停下了
使用的是反電動(dòng)勢(shì)比較器換相的
發(fā)表于 10-31 06:54
無(wú)刷直流電機(jī)反電動(dòng)勢(shì)估計(jì)方法
無(wú)刷直流電機(jī)反電動(dòng)勢(shì)估計(jì)方法_劉棟良
發(fā)表于 01-13 14:24
?29次下載
無(wú)刷電機(jī)改變反電動(dòng)勢(shì)波形的方法是什么
,它與電機(jī)的轉(zhuǎn)速、磁極數(shù)、電機(jī)參數(shù)等有關(guān)。通過(guò)改變反電動(dòng)勢(shì)的波形,可以進(jìn)一步優(yōu)化無(wú)刷電機(jī)的性能和特性。 一種改變





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論