") 臟污識別,掃地機器人的又一塊拼圖
臟污識別,掃地機器人的又一塊拼圖
重新定義清潔方式。
“四肢”發(fā)達,“頭腦”簡單
在過去幾年,掃地機器人進入了快速迭代期,從清潔系統(tǒng),到外觀,再到基站,都和最初的產品有了天壤之別,然而時至今日,大刀闊斧式的創(chuàng)新越來越少,掃地機器人下一個拼圖又該是什么?
一直以來,廠商們在銷售過程中無不強調掃地機器人“人”的屬性,但用戶真正感受到的卻是“機器”的屬性,所謂的智能化更多是個噱頭。再看過去的升級也大多圍繞在“機器”的屬性上,而“人”的屬性卻進展寥寥。不過隨著大模型的興起,智能決策、人機交互逐漸被重視起來,機器人的智能化拼圖正在完善。但在這之中,仍有一個問題被人們所忽視。
除了需要提升清潔系統(tǒng),還需要改變機器人的作業(yè)邏輯。
簡單來說,現(xiàn)在的掃地機器人只有機器的“蠻力”,卻沒有人的“靈巧”。作業(yè)中,只會按部就班的“一條道走到黑”,導致最終的清潔效果并不穩(wěn)定,甚至會反向清掃。無法像人一樣,知道哪里臟,有多臟,是什么樣的臟污,從而做出相應的清掃方式。
在真實場景中,地面的臟污程度和臟污類型都不同,包括零食殘渣、飲料液體、廚余污漬等等。而一旦遇到這些臟污,如液體類,大多會被邊刷掃的到處濺射,引發(fā)更多的清潔問題。另外,在遇到重污區(qū)域時,也會出現(xiàn)清潔不干凈的情況,若采用多遍清掃,又會導致重復清掃,耗能增加,整體清潔效率低,體驗感下降等。
如果讓機器人具備和人相似的主動臟污識別能力,無疑是讓機器人具備“人”的屬性的重要途徑。
通過主動臟污識別,意味著機器人能夠根據地面的實際情況實時調整清潔策略,做到有的放矢,在臟的地方反復清潔,不臟的地方不做無效清潔,有效減少人工干預,提升機器人的清潔效率和質量,其意義不言而喻。
事實上,市面上已經有廠商將臟污識別技術集成到產品中,如云鯨J4、云鯨逍遙001,且取得了不錯的表現(xiàn)。與此同時,這條賽道的玩家不只有云鯨等廠商,INDEMIND在臟污識別技術研發(fā)和應用上同樣走在了行業(yè)前列。
作為一家以視覺技術為核心的AI技術公司,INDEMIND在視覺感知技術的探索上,有著天然的敏感性,在早期著手研發(fā)機器人解決方案之初,便意識到機器人在清潔邏輯上的局限性,過于呆板化的機械式清潔,會降低機器人的清潔表現(xiàn)。
因此,如何讓機器人能夠自主探污、識污,根據污漬的種類和分布情況,自主決策清潔方式,便成為了INDEMIND的一個重要技術目標。
為了實現(xiàn)構想,INDEMIND自研了極具自身特色的圖像算法,配合自研的融合攝像頭及主動補光策略,構建了基礎的INDEMIND臟污識別技術。經過多次算法迭代,最終實現(xiàn)了平均臟污檢出率99%以上(包含常見固體、液體臟污),支持任何地面材質、花色、光線下的透明、半透明,不透明液體及干涸污漬識別、顆粒狀臟污識別、粉末狀臟污識別,是目前行業(yè)極少成熟且性能優(yōu)異的技術方案。
重新定義清潔方式
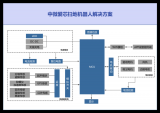
針對不同地面情況,INDEMIND開發(fā)了系統(tǒng)化的清潔策略,包含清潔遍數(shù)、清潔力度(毛刷壓力和速度、出水量等)、清潔時長等,配合INDEMIND基于設備端、云端智能決策平臺、大數(shù)據平臺三端專門建立的智能決策引擎,能夠支持機器人自主判斷決策清潔方式,如遇到液體時,停止邊刷,僅使用拖地功能,以防液體濺射。
同時,機器人不再受制于清潔結構和自身重量,對重度臟污可以自主執(zhí)行多次清潔及清潔成果檢測,提升清潔能力上限,且也意味著機器人開發(fā)的硬件選擇有了更多可能。
此外,機器人也不再受制于定期清潔計劃,具備主動臟污巡檢和作業(yè)能力,對于使用者更加友好和智能。
需要提到的是,商用清潔機器人在清潔邏輯上的問題和掃地機器人并無本質區(qū)別。平均化、全覆蓋的清潔邏輯,一是讓機器人在重污區(qū)域沒有清理干凈時就需要人為參與檢查;二是輕污區(qū)域清潔費水費電的情況。看似替代了人力,卻又沒有完全替代。
臟污識別技術對于掃地機器人以及商用清潔機器人而言,絕非簡單意義上的常規(guī)升級,而是在重新定義清潔方式,讓機器人在行為上真正開始仿生,這與現(xiàn)有產品有著跨代差別。
審核編輯 黃宇
-
掃地機器人
+關注
關注
20文章
779瀏覽量
53369
發(fā)布評論請先 登錄
相關推薦
掃地機器人應用解決方案
霍爾開關在掃地機器人中的應用
掃地機器人的核心技術突破
掃地機器人避障技術的發(fā)展史
隱形清潔大師:灰塵顆粒物壓電傳感器引領掃地機器人新一輪智能清潔革命

供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
掃地機器人高溫高濕試驗標準詳解及試驗方法

光耦知識分享‖探討光耦技術在掃地機器人的應用

其利天下技術·搭載無刷電機的掃地機器人的前景如何?
掃地機器人CCC認證申請流程與其他產品的區(qū)別是什么?







 工商網監(jiān)
工商網監(jiān)
評論