 如何由阻尼比求閉環極點和增益
如何由阻尼比求閉環極點和增益
在自動控制系統中,阻尼比、閉環極點和增益是三個至關重要的參數,它們共同決定了系統的穩定性和動態性能。
一、阻尼比的定義與意義
阻尼比(Damping Ratio),通常表示為ξ(xi),是描述系統阻尼特性的一個重要參數。它反映了系統阻尼器對系統振動的抑制能力,即系統振動的衰減速度。阻尼比越大,系統振動的衰減速度越快,系統的穩定性越好;反之,阻尼比越小,系統振動的衰減速度越慢,系統的穩定性越差。
在二階系統中,阻尼比ξ與自然頻率ω_n一起決定了系統的動態響應特性。二階系統的傳遞函數可以表示為: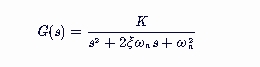
其中,K是系統增益,s是復頻率變量,ω_n是系統的自然頻率。從這個傳遞函數中,我們可以看出系統的動態性能與阻尼比ξ、自然頻率ω_n以及增益K密切相關。
二、閉環極點的求解
閉環極點是系統閉環傳遞函數分母為零時的根,它們決定了系統的穩定性和動態響應。在自動控制系統中,通常需要通過調整閉環極點的位置來優化系統的性能。
對于二階系統,其閉環傳遞函數可以表示為: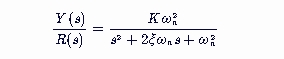
?
其中,Y(s)是輸出信號的拉普拉斯變換,R(s)是輸入信號的拉普拉斯變換。閉環極點是該傳遞函數分母為零時的解,即求解方程:
的根。
這個方程是一個二次方程,其解為: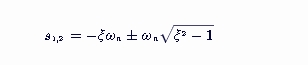
?
這兩個解就是系統的閉環極點。根據阻尼比ξ的不同取值,閉環極點的性質也會有所不同:
- 過阻尼系統(ξ > 1) :此時,方程的兩個解都是實數,且均為負值。系統響應將按照指數形式單調逐漸穩定到輸入,無振蕩現象。
- 臨界阻尼系統(ξ = 1) :此時,方程的兩個解重合,為一個實數。系統響應同樣將按照指數形式單調逐漸穩定到輸入,但比過阻尼系統響應更快。
- 欠阻尼系統(0 < ξ < 1) :此時,方程的兩個解為一對共軛復數。系統響應為衰減振蕩曲線,且逐漸穩定到輸入。系統的衰減程度和振蕩程度分別由閉環極點的實部和虛部決定。
三、增益的求解與調整
增益K是系統對輸入信號的放大倍數,它決定了系統輸出的幅值大小。在自動控制系統中,增益的選擇對系統的穩定性和動態性能有著重要影響。
對于給定的阻尼比ξ和自然頻率ω_n,增益K的選擇需要根據系統的具體要求進行。一般來說,可以通過以下步驟來求解和調整增益:
- 確定系統要求 :首先,需要明確系統對穩定性、響應速度和穩態誤差等性能指標的要求。
- 選擇阻尼比ξ :根據系統要求,選擇合適的阻尼比ξ。如果系統需要快速響應且無振蕩,可以選擇較小的阻尼比;如果系統需要較好的穩定性,可以選擇較大的阻尼比。
- 計算閉環極點 :根據選定的阻尼比ξ和自然頻率ω_n,計算閉環極點的位置。
- 調整增益K :在保持閉環極點位置不變的情況下,通過調整增益K來滿足系統對輸出幅值的要求。需要注意的是,增益K的調整可能會影響到系統的穩定性和動態性能,因此需要謹慎進行。
- 仿真驗證 :在完成增益K的調整后,需要進行仿真驗證以檢查系統的性能是否滿足要求。如果不滿足要求,需要重新調整阻尼比ξ和增益K。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
自動控制系統
+關注
關注
1文章
188瀏覽量
19387 -
參數
+關注
關注
11文章
1791瀏覽量
32110 -
函數
+關注
關注
3文章
4308瀏覽量
62444 -
共極點
+關注
關注
0文章
2瀏覽量
5589 -
阻尼器
+關注
關注
0文章
48瀏覽量
11544
發布評論請先 登錄
相關推薦
如何去理解增益帶寬積 、開環運放帶寬、閉環系統的帶寬這幾個參數?
固定”,這說的是“閉環增益*閉環帶寬=增益帶寬積”嗎??
就針對單個開環運放而言,有“增益帶寬積固定”這個說法嗎?
目前我們分析系統的頻率特
發表于 08-12 07:05
數字化CVCF逆變器中的波形控制方式
(最惡劣的情況),配置極點時應注意逆變器帶載以后阻尼比會變大。 取電容電壓vC和電容電流iC作為狀態變量,PWM逆變器的空載模型為: 引入狀態反饋 其中r 是閉環系統參考指令,K是反饋
發表于 09-27 15:09
如何將放大器建模為模擬濾波器,從而提高SPICE仿真速度?
ω軸的徑向距離;Q 值越大,則說明極點離 jω軸越近。對于放大器,阻尼比越大,則峰化越低。這些關系為 s域 (s = jω) 傳遞函數與模擬濾波器電路提供了有用的等效轉換途徑。設計示例:5倍增益放大器該
發表于 12-01 08:00
請問用在單位增益的閉環負反饋中的op-amp阻尼大不大?
仿一個應用在單位增益的op-amp, 結果是phase margin有90度,然而相位偏差180°時候,gAIn由于零點影響,只是降到0.65,請問用在單位增益的閉環負反饋中,op-amp的阻
發表于 06-25 06:13
二階閉環系統的頻率特性曲線
二階閉環系統的頻率特性曲線一.實驗要求1. 研究二階閉環系統的結構參數--自然頻率(無阻尼振蕩角頻率)ωn、阻尼比ξ對對數幅頻曲線和相頻曲線的影響。2. 了解和掌
發表于 05-15 00:52
?55次下載
多變量阻尼比靈敏度的有功調制
算法(stochastic subspace identification,ssi)從系統基礎運行數據中提取系統振蕩頻率與阻尼比等,當系統存在弱阻尼模式時發出預警,進而應用多變量阻尼比靈敏度,篩選參調發電機組,并利用優化算法確定
發表于 12-14 13:55
?0次下載

數字陷波器有源阻尼方法
為了解決傳統電容電流比例反饋有源阻尼方法控制結構復雜以及由系統延時所導致的諧振阻尼區域狹小等問題,對基于陷波器的有源阻尼方法進行了研究。將系統的諧振
發表于 03-13 14:17
?0次下載

風電系統弱阻尼低頻振蕩模式抑制
變化,分析弱阻尼低頻模式區域極點配置的必要性。兼顧電網原有及新引入弱阻尼低頻模式,構建降階模型。采用基于線性矩陣不等式的區域極點配置法,設計輸出反饋控制器,將所有弱
發表于 03-14 10:35
?0次下載
溫度和風速對橋梁結構模態頻率和阻尼比的影響研究
主要研究溫度和風速兩個環境因素對橋梁結構模態頻率和阻尼比的影響,并建立環境因素與模態參數之 間關系的數學模型。由于風速和溫度的相關性較強,提出通過非線性主成分分析將相關的溫度 、風速轉化為兩 個
發表于 04-25 10:21
?0次下載
過阻尼系統的動態性能指標有哪些
過阻尼系統的動態性能指標是衡量系統動態響應特性的重要參數。在工程實踐中,過阻尼系統廣泛應用于各種機械設備、結構系統和控制系統中。 引言 過阻尼系統是指阻尼比大于臨界
提高系統的阻尼比對系統有何影響
阻尼比是衡量系統阻尼程度的一個重要參數,它對系統的動態性能和穩定性有著重要的影響。本文將從以下幾個方面探討提高系統阻尼比對系統的影響: 阻尼比的定義和計算方法
閉環增益對系統動態性能的影響
在自動控制系統中,閉環控制作為一種重要的控制方式,通過引入反饋機制來調整系統的輸出,使其更好地適應外部環境的變化。閉環增益作為閉環控制系統中的一個核心參數,對系統的動態性能有著至關重要





 工商網監
工商網監
評論