 卡爾曼濾波的優缺點有哪些
卡爾曼濾波的優缺點有哪些
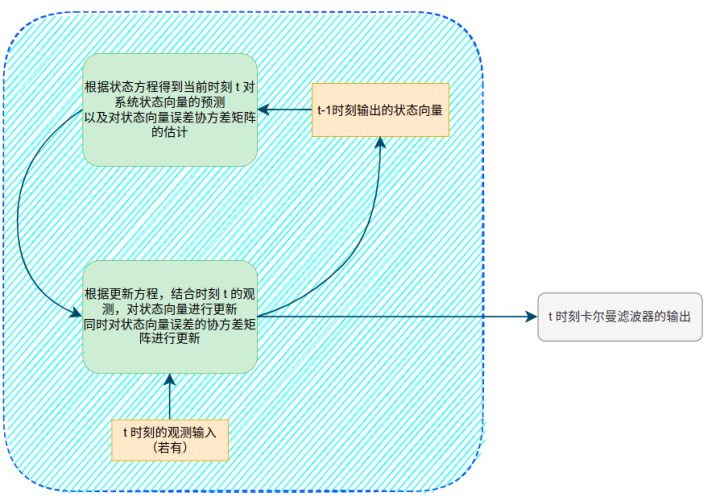
卡爾曼濾波(Kalman Filter)是一種線性動態系統的狀態估計算法,廣泛應用于信號處理、導航、控制等領域。
- 卡爾曼濾波的優點
1.1 高效性
卡爾曼濾波是一種遞歸算法,可以在實時系統中高效地進行狀態估計。它只需要存儲當前時刻的狀態估計和誤差協方差,而不需要存儲整個觀測序列,從而節省了計算資源和存儲空間。
1.2 魯棒性
卡爾曼濾波對系統模型和觀測模型的不確定性具有一定的魯棒性。即使模型存在一定的誤差,卡爾曼濾波仍然能夠提供較為準確的狀態估計。此外,卡爾曼濾波還可以通過調整過程噪聲和觀測噪聲的協方差來適應不同的系統特性。
1.3 準確性
在線性高斯系統下,卡爾曼濾波能夠提供最優的狀態估計。它利用最小二乘法最小化估計誤差的方差,從而實現對系統狀態的準確估計。在許多實際應用中,卡爾曼濾波的估計精度已經得到了廣泛認可。
1.4 可擴展性
卡爾曼濾波可以擴展到更復雜的系統,如非線性系統和多變量系統。通過引入擴展卡爾曼濾波(EKF)和無跡卡爾曼濾波(UKF)等變體,卡爾曼濾波可以應用于更廣泛的領域。
1.5 易于實現
卡爾曼濾波的算法相對簡單,易于實現。許多編程語言和數學軟件包都提供了卡爾曼濾波的實現,使得用戶可以快速地將其應用于實際問題。
- 卡爾曼濾波的缺點
2.1 線性系統限制
卡爾曼濾波的基本假設是系統和觀測模型是線性的,且噪聲是高斯分布的。然而,在許多實際應用中,系統可能存在非線性特性,這會導致卡爾曼濾波的估計精度下降。
2.2 模型誤差敏感性
卡爾曼濾波對系統模型和觀測模型的誤差非常敏感。如果模型存在較大的誤差,卡爾曼濾波的估計結果可能會受到很大的影響。因此,在實際應用中,需要對模型進行精確的建模和校準。
2.3 計算復雜性
雖然卡爾曼濾波的算法相對簡單,但在處理高維系統時,其計算復雜性可能會變得很高。特別是在擴展卡爾曼濾波和無跡卡爾曼濾波中,由于需要對非線性函數進行線性化和積分,計算量可能會顯著增加。
2.4 初始狀態敏感性
卡爾曼濾波對初始狀態的估計非常敏感。如果初始狀態估計不準確,可能會導致濾波器的收斂速度變慢,甚至無法收斂。因此,在實際應用中,需要對初始狀態進行合理的估計和調整。
2.5 對噪聲的假設限制
卡爾曼濾波假設過程噪聲和觀測噪聲是高斯分布的,且具有已知的協方差。然而,在實際應用中,噪聲的分布可能并不符合高斯分布,或者協方差未知。這可能會導致卡爾曼濾波的估計精度下降。
- 結論
卡爾曼濾波作為一種經典的狀態估計算法,在許多領域得到了廣泛的應用。它具有高效性、魯棒性、準確性、可擴展性和易于實現等優點。然而,它也存在一些缺點,如線性系統限制、模型誤差敏感性、計算復雜性、初始狀態敏感性和對噪聲的假設限制等。
-
存儲
+關注
關注
13文章
4262瀏覽量
85669 -
信號處理
+關注
關注
48文章
1000瀏覽量
103201 -
非線性系統
+關注
關注
0文章
20瀏覽量
7875 -
卡爾曼濾波
+關注
關注
3文章
162瀏覽量
24635
發布評論請先 登錄
相關推薦
擴展卡爾曼濾波的原理

卡爾曼濾波的變種有哪些?1
卡爾曼濾波的變種有哪些?2
卡爾曼濾波的變種有哪些?3
卡爾曼濾波的變種有哪些?4







 工商網監
工商網監
評論