") 鳳凰動(dòng)力-AGV差速驅(qū)動(dòng)輪的工作原理
鳳凰動(dòng)力-AGV差速驅(qū)動(dòng)輪的工作原理
AGV差速驅(qū)動(dòng)輪的工作原理基于差速器的原理。常見的差速驅(qū)動(dòng)方式有多種結(jié)構(gòu)形式,如雙舵輪型、雙差速驅(qū)動(dòng)轉(zhuǎn)向機(jī)構(gòu)等。
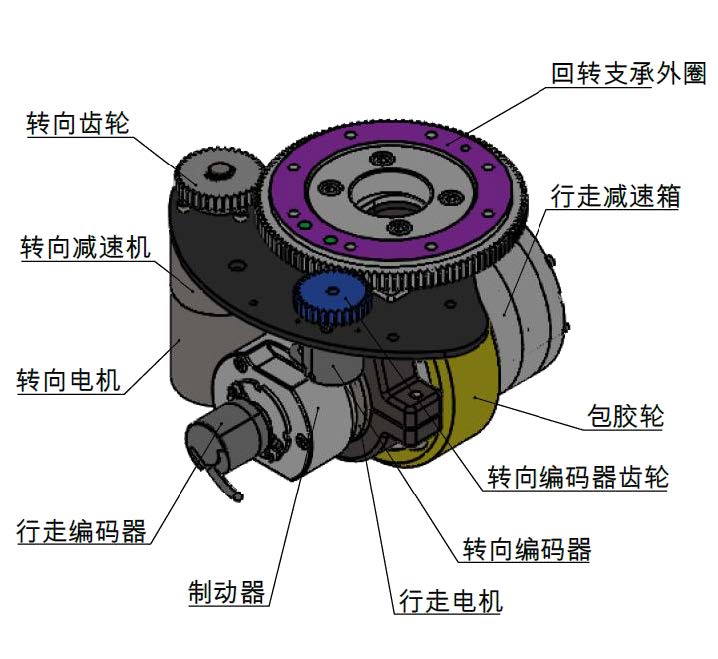
雙舵輪型結(jié)構(gòu)中,AGV的兩個(gè)車輪都裝有驅(qū)動(dòng)電機(jī)和轉(zhuǎn)向電機(jī)及其動(dòng)力傳動(dòng)裝置,兩輪與車架通過承重回轉(zhuǎn)支撐活連接,其他車輪起承重作用。當(dāng)需要轉(zhuǎn)向時(shí),通過控制兩個(gè)舵輪的轉(zhuǎn)速和轉(zhuǎn)向?qū)崿F(xiàn)。
雙差速驅(qū)動(dòng)轉(zhuǎn)向機(jī)構(gòu)則有兩組差速驅(qū)動(dòng)轉(zhuǎn)向裝置,每組通過承重回轉(zhuǎn)支撐與車體連接,每個(gè)車輪裝備一個(gè)驅(qū)動(dòng)電機(jī),其他為隨動(dòng)輪。這種結(jié)構(gòu)完全依靠內(nèi)外轉(zhuǎn)向輪之間的速度差來實(shí)現(xiàn)轉(zhuǎn)向。
具體來說,差速驅(qū)動(dòng) AGV利用兩個(gè)獨(dú)立驅(qū)動(dòng)的馬達(dá)或電機(jī)來驅(qū)動(dòng)兩個(gè)驅(qū)動(dòng)輪。當(dāng)兩個(gè)馬達(dá)的轉(zhuǎn)速相同時(shí),差速器會(huì)使兩個(gè)驅(qū)動(dòng)輪以相同的速度旋轉(zhuǎn),使車輛直線行進(jìn);當(dāng)兩個(gè)馬達(dá)的轉(zhuǎn)速不同時(shí),差速器會(huì)使兩個(gè)驅(qū)動(dòng)輪以不同的速度旋轉(zhuǎn),從而實(shí)現(xiàn)車輛的轉(zhuǎn)彎。
例如,假設(shè) AGV向左轉(zhuǎn)彎,左側(cè)的馬達(dá)會(huì)被設(shè)定為旋轉(zhuǎn)較慢,右側(cè)的馬達(dá)會(huì)被設(shè)定為旋轉(zhuǎn)較快。這樣,差速器將通過行星齒輪和夾盤的配合,使左側(cè)驅(qū)動(dòng)輪轉(zhuǎn)動(dòng)較慢,右側(cè)驅(qū)動(dòng)輪轉(zhuǎn)動(dòng)較快,車輛就能夠左轉(zhuǎn)彎。
差速驅(qū)動(dòng)結(jié)構(gòu)具有良好的轉(zhuǎn)彎性能和靈活性,能夠?qū)崿F(xiàn)較小半徑的轉(zhuǎn)彎,適用于狹小空間的運(yùn)輸需求。但它也存在一些缺點(diǎn),比如當(dāng)遇到摩擦系數(shù)不一致或地面不平的情況時(shí),可能造成驅(qū)動(dòng)輪打滑,導(dǎo)致車輛行進(jìn)不穩(wěn)定。此外,在高速行駛時(shí),也容易引起車輛的不穩(wěn)定。
總之,AGV差速驅(qū)動(dòng)輪通過控制左右驅(qū)動(dòng)輪的轉(zhuǎn)速差異來實(shí)現(xiàn)車輛的轉(zhuǎn)向和行進(jìn),在實(shí)際應(yīng)用中需要綜合考慮其優(yōu)缺點(diǎn),以達(dá)到最佳的使用效果。
雙舵輪型 AGV差速驅(qū)動(dòng)工作方式
雙舵輪型 AGV的差速驅(qū)動(dòng)工作方式較為復(fù)雜。在這種結(jié)構(gòu)中,AGV的兩個(gè)車輪都裝有驅(qū)動(dòng)電機(jī)和轉(zhuǎn)向電機(jī)及其動(dòng)力傳動(dòng)裝置,兩輪與車架通過承重回轉(zhuǎn)支撐活連接,其他車輪起承重作用。當(dāng)需要轉(zhuǎn)向時(shí),通過控制兩個(gè)舵輪的轉(zhuǎn)速和轉(zhuǎn)向來實(shí)現(xiàn)。具體而言,若要實(shí)現(xiàn)向左轉(zhuǎn)彎,左側(cè)的舵輪會(huì)被設(shè)定為旋轉(zhuǎn)較慢,右側(cè)的舵輪則旋轉(zhuǎn)較快,從而使車輛能夠順利左轉(zhuǎn)彎。雙舵輪型 AGV憑借這種差速驅(qū)動(dòng)方式,可以實(shí)現(xiàn) 360°回轉(zhuǎn)功能和萬向橫移,具有高度的靈活性和精確的運(yùn)行精度。然而,這種結(jié)構(gòu)的缺點(diǎn)也較為明顯,兩套舵輪成本較高,而且 AGV運(yùn)行中經(jīng)常需要兩個(gè)舵輪差動(dòng),這對電機(jī)的運(yùn)動(dòng)控制算法要求較高,同時(shí)對地面平整度要求嚴(yán)格。
雙差速驅(qū)動(dòng)轉(zhuǎn)向機(jī)構(gòu)工作原理
雙差速驅(qū)動(dòng)轉(zhuǎn)向機(jī)構(gòu)有兩組差速驅(qū)動(dòng)轉(zhuǎn)向裝置,每組通過承重回轉(zhuǎn)支撐與車體連接,每個(gè)車輪裝備一個(gè)驅(qū)動(dòng)電機(jī),其他為隨動(dòng)輪。這種結(jié)構(gòu)完全依靠內(nèi)外轉(zhuǎn)向輪之間的速度差來實(shí)現(xiàn)轉(zhuǎn)向。例如,當(dāng) AGV需要向左轉(zhuǎn)彎時(shí),左側(cè)的車輪轉(zhuǎn)速會(huì)降低,右側(cè)的車輪轉(zhuǎn)速會(huì)提高,通過這種速度差來完成轉(zhuǎn)向動(dòng)作。這種轉(zhuǎn)向機(jī)構(gòu)的優(yōu)點(diǎn)是轉(zhuǎn)向靈活,能適應(yīng)各種復(fù)雜的工況,但同時(shí)也存在一些問題,比如控制器難以完全準(zhǔn)確控制,車輛在運(yùn)動(dòng)過程中可能會(huì)產(chǎn)生車輪滑移和震動(dòng),從而造成車輪的磨損。
AGV差速驅(qū)動(dòng)輪的優(yōu)點(diǎn)
AGV差速驅(qū)動(dòng)輪具有多個(gè)優(yōu)點(diǎn)。首先,它具有良好的轉(zhuǎn)彎性能和靈活性,能夠?qū)崿F(xiàn)較小半徑的轉(zhuǎn)彎,適用于狹小空間的運(yùn)輸需求。其次,差速驅(qū)動(dòng)結(jié)構(gòu)對馬達(dá)的要求較低,成本相對較低。此外,差速驅(qū)動(dòng)輪能夠通過控制左右驅(qū)動(dòng)輪的轉(zhuǎn)速差異,實(shí)現(xiàn)車輛的高效轉(zhuǎn)向和行進(jìn),提高了運(yùn)輸效率。例如,在倉庫貨物搬運(yùn)場景中,AGV差速驅(qū)動(dòng)輪可以輕松在狹窄的通道中穿梭,準(zhǔn)確地將貨物送達(dá)指定位置。
AGV差速驅(qū)動(dòng)輪的缺點(diǎn)
AGV差速驅(qū)動(dòng)輪存在一些不可忽視的缺點(diǎn)。當(dāng)遇到摩擦系數(shù)不一致或地面不平的情況時(shí),可能造成驅(qū)動(dòng)輪打滑,導(dǎo)致車輛行進(jìn)不穩(wěn)定。在高速行駛時(shí),也容易引起車輛的不穩(wěn)定。此外,差速驅(qū)動(dòng)輪對地面平整度要求較高,如果地面不平整,可能會(huì)影響其正常運(yùn)行。比如在一些路況較差的工廠車間,AGV差速驅(qū)動(dòng)輪可能會(huì)因?yàn)榈孛娴陌纪共黄蕉霈F(xiàn)運(yùn)行故障。
AGV差速驅(qū)動(dòng)輪如何實(shí)現(xiàn)直線行進(jìn)
AGV差速驅(qū)動(dòng)輪實(shí)現(xiàn)直線行進(jìn)的原理是通過控制兩個(gè)獨(dú)立驅(qū)動(dòng)的馬達(dá)或電機(jī)。當(dāng)兩個(gè)馬達(dá)的轉(zhuǎn)速相同時(shí),差速器會(huì)使兩個(gè)驅(qū)動(dòng)輪以相同的速度旋轉(zhuǎn),從而使車輛直線行進(jìn)。例如,假設(shè) AGV在一條平坦且筆直的通道上行駛,此時(shí)控制兩個(gè)馬達(dá)以相同的轉(zhuǎn)速運(yùn)轉(zhuǎn),差速器會(huì)均勻地分配動(dòng)力,使左右驅(qū)動(dòng)輪保持同步,車輛就能穩(wěn)定地直線前進(jìn)。
綜上所述,AGV差速驅(qū)動(dòng)輪的工作原理基于差速器的作用,通過控制左右驅(qū)動(dòng)輪的轉(zhuǎn)速差異實(shí)現(xiàn)轉(zhuǎn)向和行進(jìn)。其具有轉(zhuǎn)彎靈活、成本較低等優(yōu)點(diǎn),但也存在容易打滑、對地面要求高等缺點(diǎn)。在實(shí)際應(yīng)用中,需要根據(jù)具體的工作場景和需求,綜合考慮其優(yōu)缺點(diǎn),以選擇最適合的 AGV驅(qū)動(dòng)方式。
蘇州鳳凰動(dòng)力工業(yè)有限公司,創(chuàng)立于2005年,是國內(nèi)領(lǐng)先的AGV/AMR無人駕駛移動(dòng)搬運(yùn)機(jī)器人及非公路電動(dòng)車輛電驅(qū)動(dòng)總成研發(fā)與生產(chǎn)企業(yè)。多年來,我們深耕于電驅(qū)動(dòng)領(lǐng)域,不斷推動(dòng)技術(shù)創(chuàng)新與產(chǎn)業(yè)升級。
旗下?lián)碛卸鄠€(gè)專業(yè)品牌,包括“鳳凰動(dòng)力”、“inagv”、“重步”、“inEVC”和“Miestype”,它們共同構(gòu)成了我們的品牌矩陣。這些品牌專注于不同的技術(shù)領(lǐng)域,如電驅(qū)動(dòng)整體解決方案、伺服電機(jī)與驅(qū)動(dòng)器、AGV專用腳輪、電驅(qū)動(dòng)系統(tǒng)控制程序以及高精密齒輪傳動(dòng)裝置的研發(fā)。
我們的使命是將復(fù)雜的技術(shù)轉(zhuǎn)化為簡單、可靠的解決方案,為客戶創(chuàng)造價(jià)值。通過品牌矩陣的協(xié)同作用,我們能夠提供一站式的電驅(qū)動(dòng)整體解決方案,幫助客戶解決各種技術(shù)難題,提升生產(chǎn)效率。
審核編輯 黃宇
-
AGV
+關(guān)注
關(guān)注
27文章
1280瀏覽量
41008
發(fā)布評論請先 登錄
相關(guān)推薦

周五的搬磚是快樂的開端 鳳凰動(dòng)力專業(yè)生產(chǎn)AGV驅(qū)動(dòng)舵輪19年 # AGV舵輪# AGV驅(qū)動(dòng)輪# AGV差速輪組

鳳凰動(dòng)力2024CeMAT展會(huì)獨(dú)家采訪 # AGV# AGV舵輪# AGV驅(qū)動(dòng)輪
鳳凰動(dòng)力AGV舵輪安裝與調(diào)試
鳳凰動(dòng)力舵輪驅(qū)動(dòng)輪的穩(wěn)定性如何影響AGV的運(yùn)行效率和穩(wěn)定性

鳳凰動(dòng)力AGV舵輪大揭秘!
“先機(jī)”!叉車AGV如何搶先對手一步獲得競爭優(yōu)勢!
驅(qū)動(dòng)輪舵輪專家-鳳凰動(dòng)力詳細(xì)介紹AGV部署攻略,發(fā)掘“無人工廠”的無限可能
鳳凰動(dòng)力為你詳解AGV舵輪的工作原理
鳳凰動(dòng)力-移動(dòng)機(jī)器人系統(tǒng)項(xiàng)目的高質(zhì)量落地之道


沒有困難的工作,只有熱愛生活的打工人 # AGV舵輪廠家# AGV驅(qū)動(dòng)輪# AGV重載舵輪# AGV差速輪
蘇州鳳凰動(dòng)力穩(wěn)定可靠的電驅(qū)動(dòng)專家,AGV驅(qū)動(dòng)舵輪專業(yè)制造19年# AGV舵輪# agv驅(qū)動(dòng)輪# 驅(qū)動(dòng)總成
差速器工作原理 差速器的傳動(dòng)特點(diǎn)是差速不差力對嗎
諧波減速器的工作原理 諧波減速器和RV減速器的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論