 e2studio開發LPS28DFW氣壓計(1)----輪詢獲取氣壓計數據
e2studio開發LPS28DFW氣壓計(1)----輪詢獲取氣壓計數據
概述
本文將介紹如何使用 LPS28DFW 傳感器來讀取數據。主要步驟包括初始化傳感器接口、驗證設備ID、配置傳感器的數據輸出率和濾波器,以及通過輪詢方式持續讀取氣壓數據和溫度數據。讀取到的數據會被轉換為適當的單位并通過串行通信輸出。
產品特性
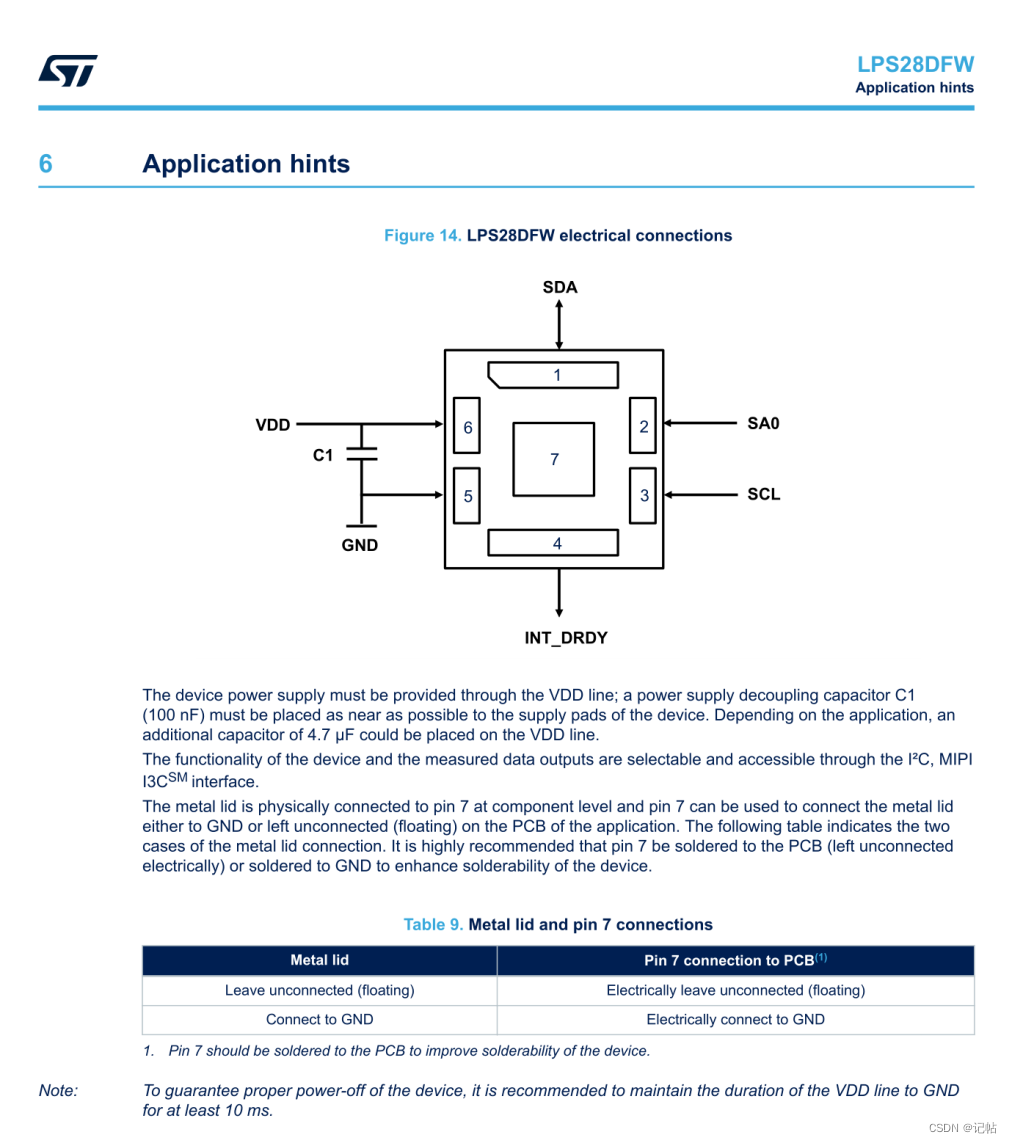
LPS28DFW 是一款高性能的壓阻式絕對壓力傳感器,設計用于提供精確的氣壓測量。這款傳感器特別適合于個人電子和消費類產品,因為它結合了多種先進特性。該傳感器以其低功耗和低噪聲性能著稱,使其在電池供電的便攜設備中尤為理想。 LPS28DFW 的封裝為陶瓷 LGA 類型,帶有金屬蓋,這種設計既提供了水阻性能,又保持了靈活性,金屬蓋可以接地或在電路板布局中保持電氣浮動。這款傳感器能夠在 -40°C 至 +85°C 的溫度范圍內穩定運作,確保在多種環境條件下的可靠性。 此外,它提供兩種全尺度的絕對壓力測量模式,精度高達 0.5 hPa,配合低至 0.32 Pa 的傳感器噪聲。內嵌的溫度補償功能進一步增強了其測量準確性。LPS28DFW 還支持高達 200 Hz 的可調輸出數據速率 (ODR) 和 24 位的壓力數據輸出。
通信模式
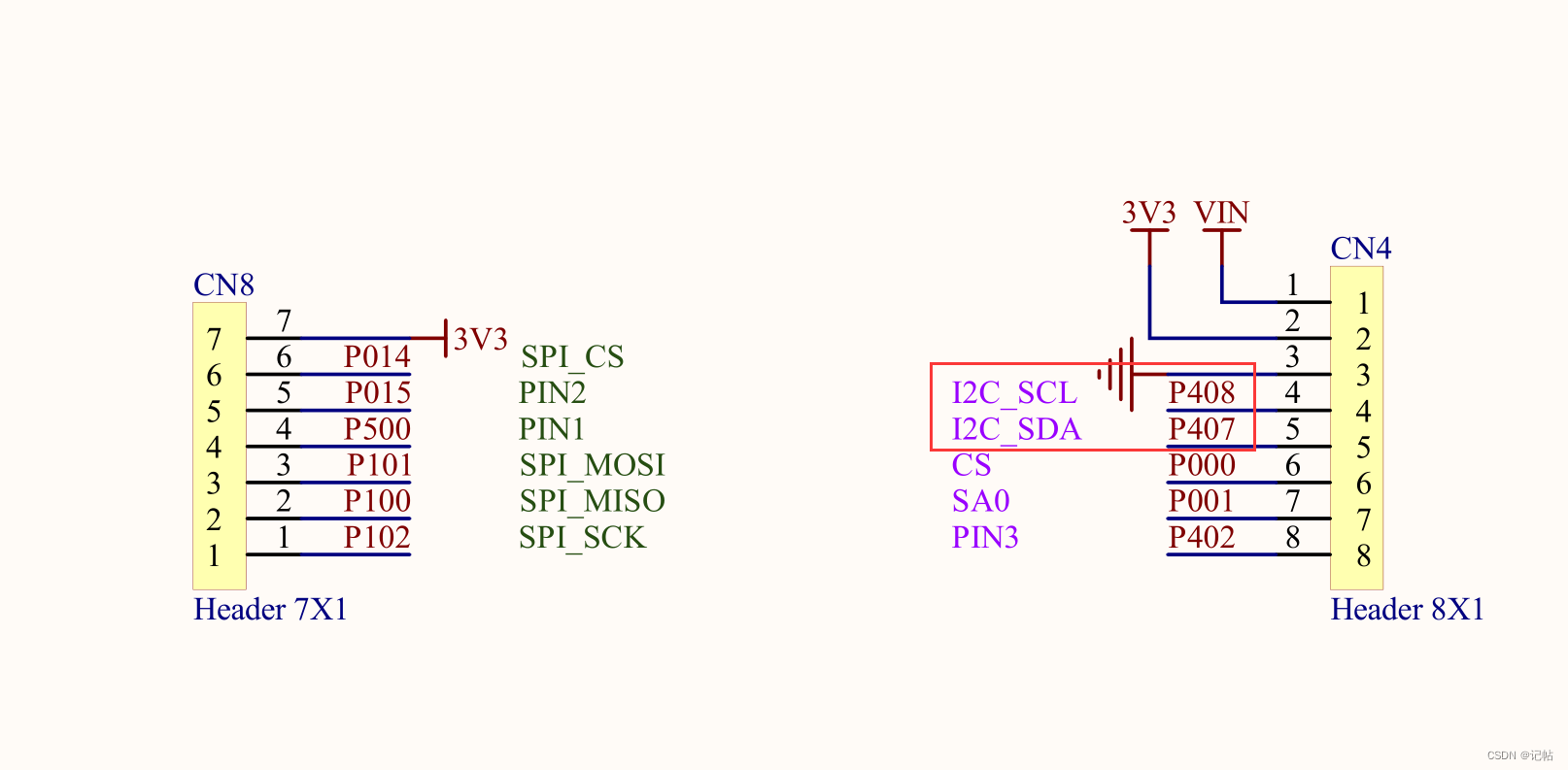
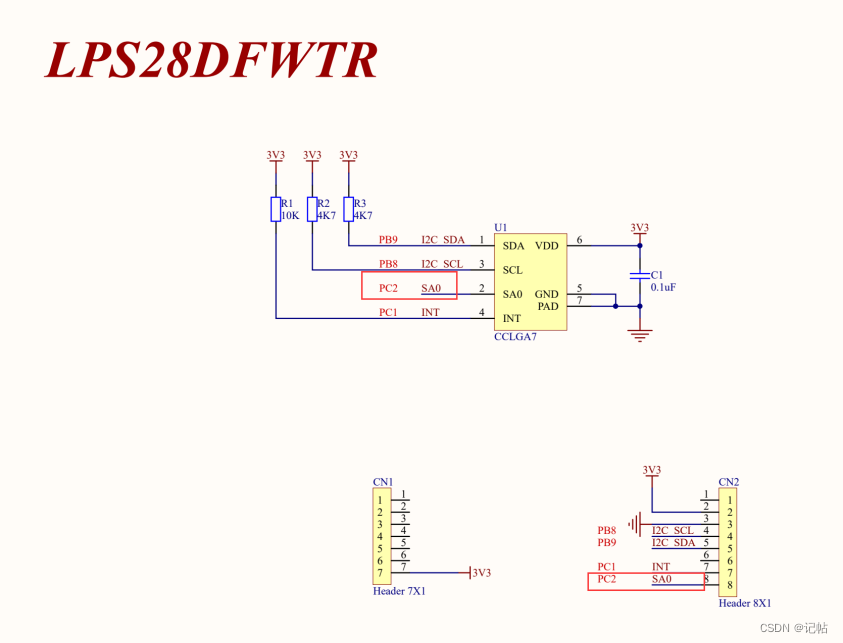
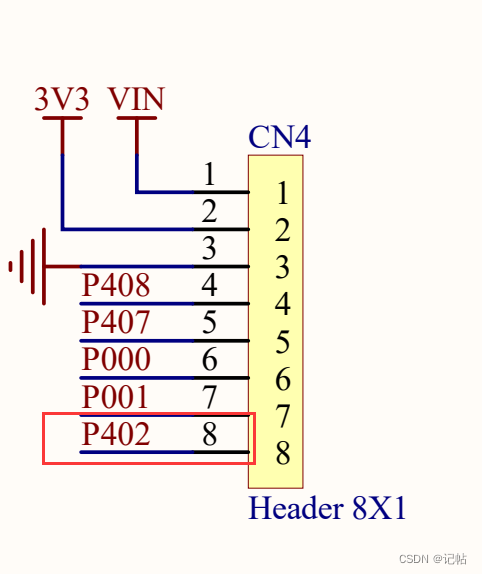
對于LPS28DFW,可以使用IIC進行通訊。 最小系統圖如下所示。
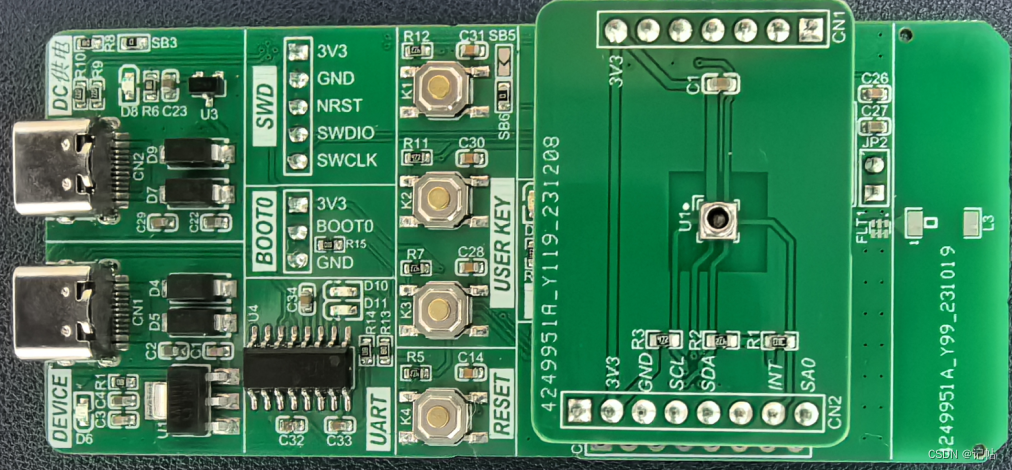
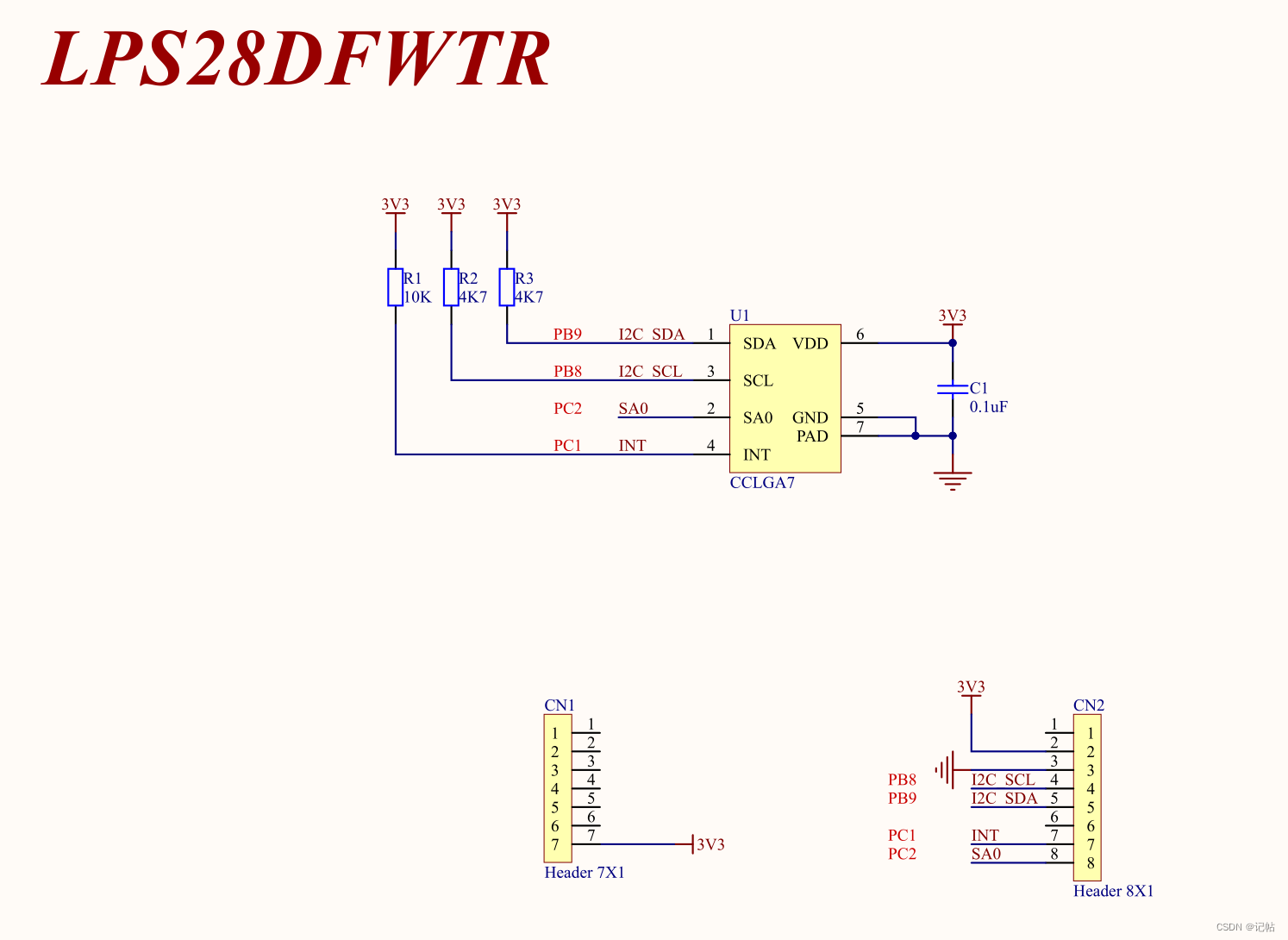
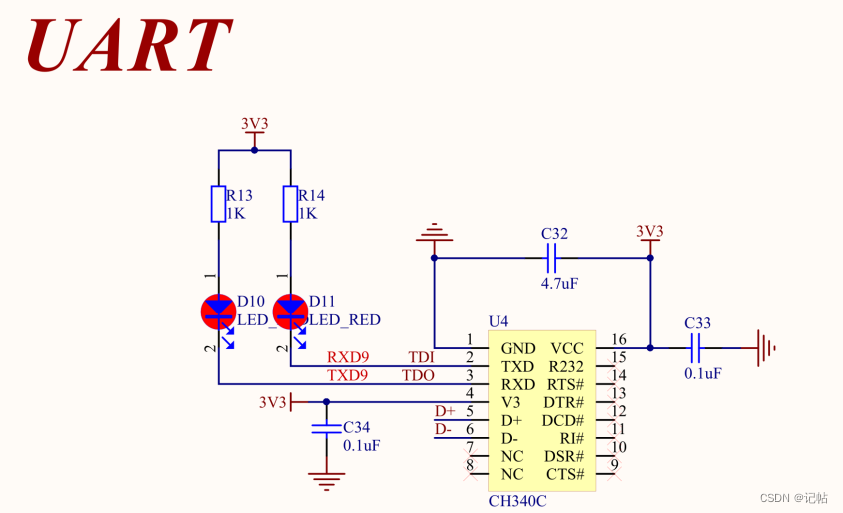
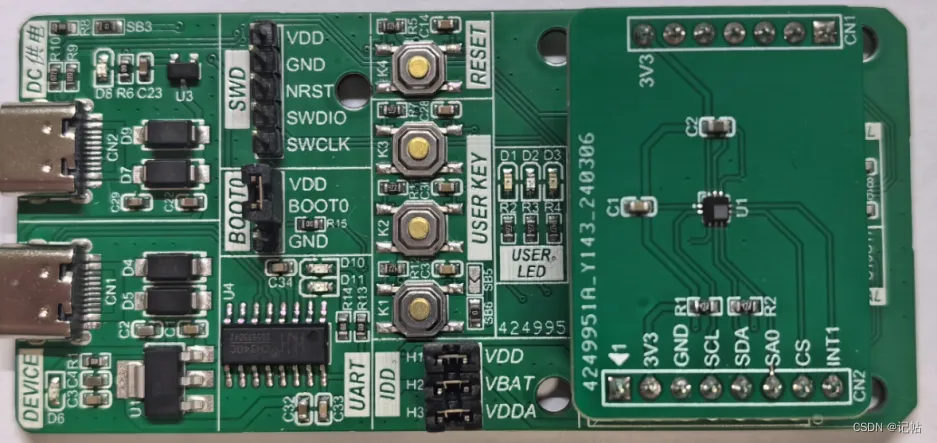
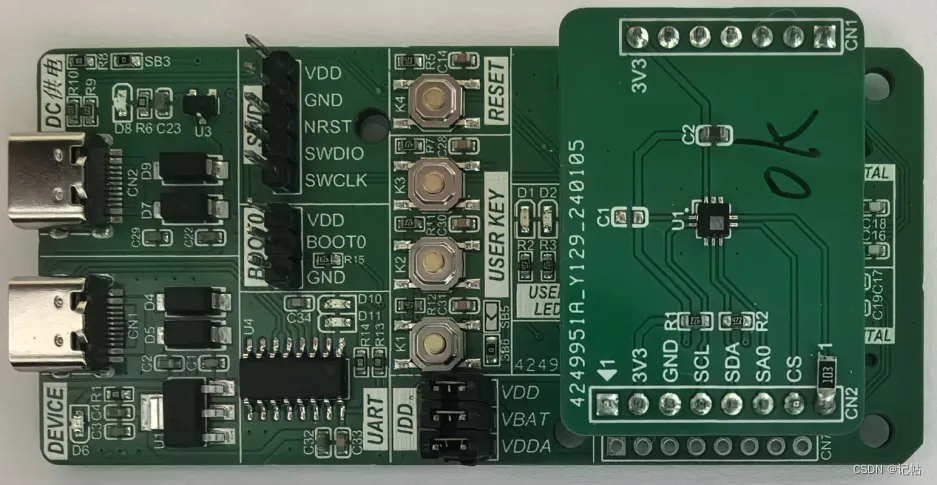
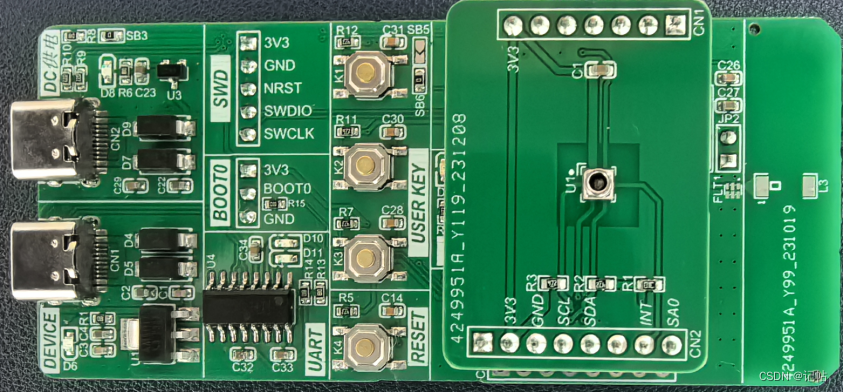
本文使用的板子原理圖如下所示。
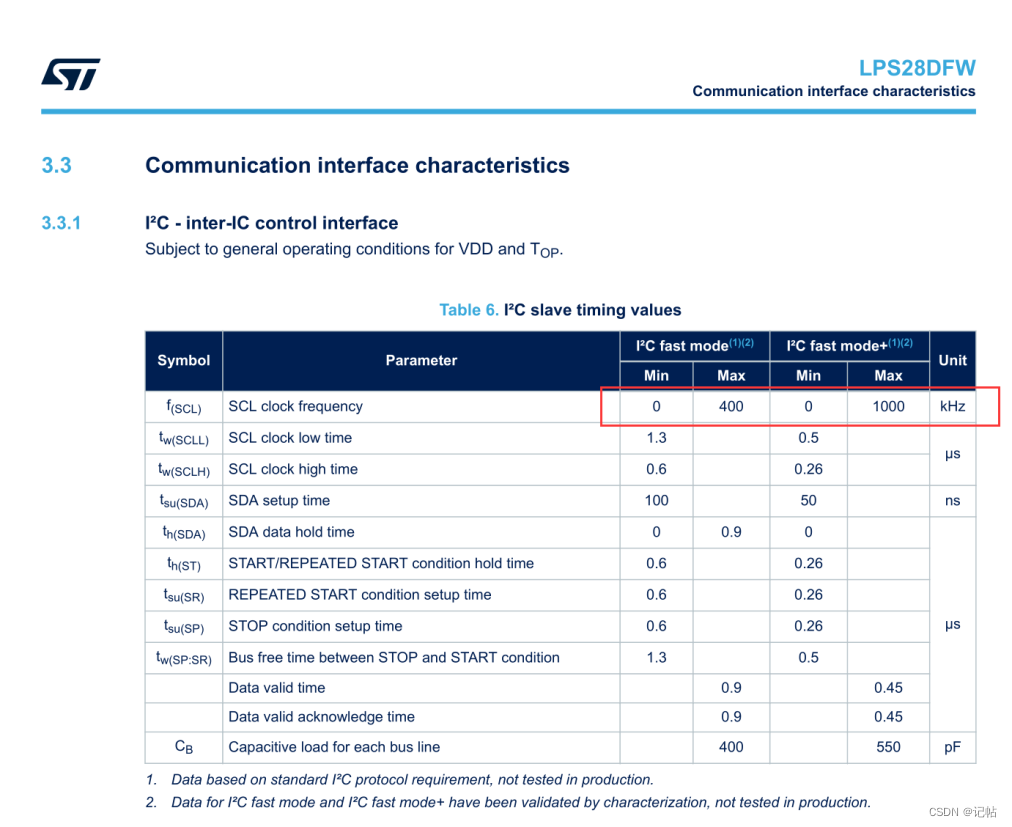
速率
該模塊支持的I2C速度最快位快速模式+(1M)。
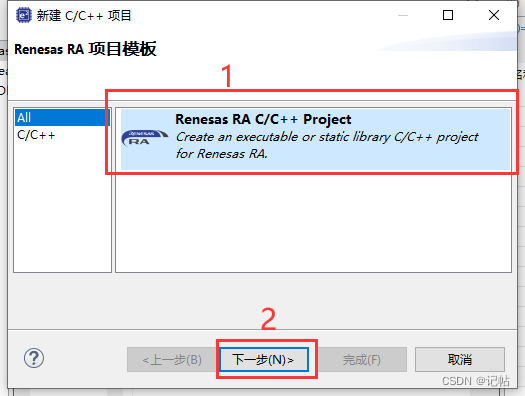
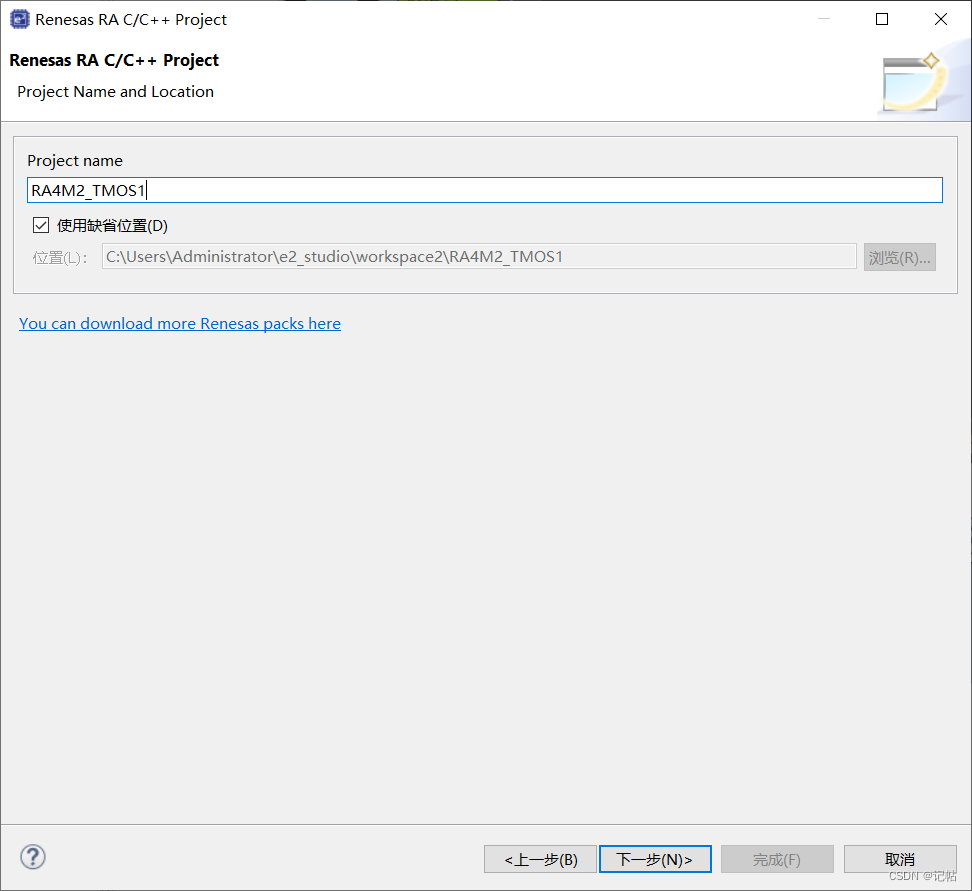
新建工程

工程模板
保存工程路徑
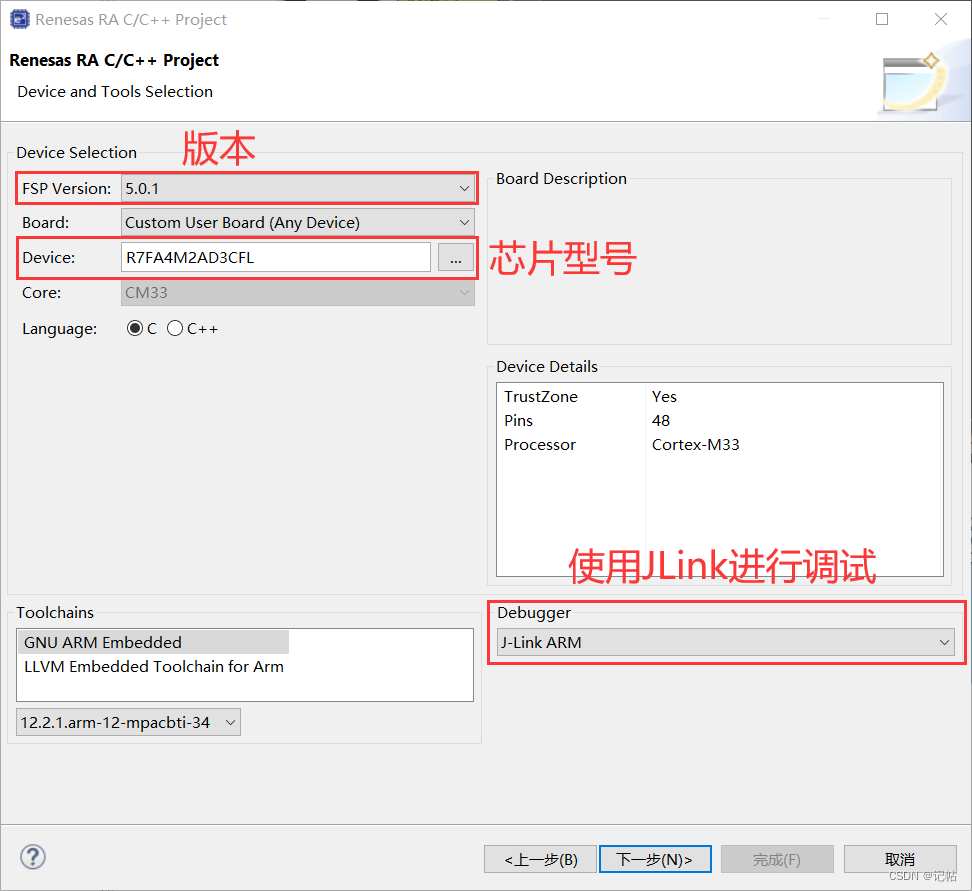
芯片配置
本文中使用R7FA4M2AD3CFL來進行演示。
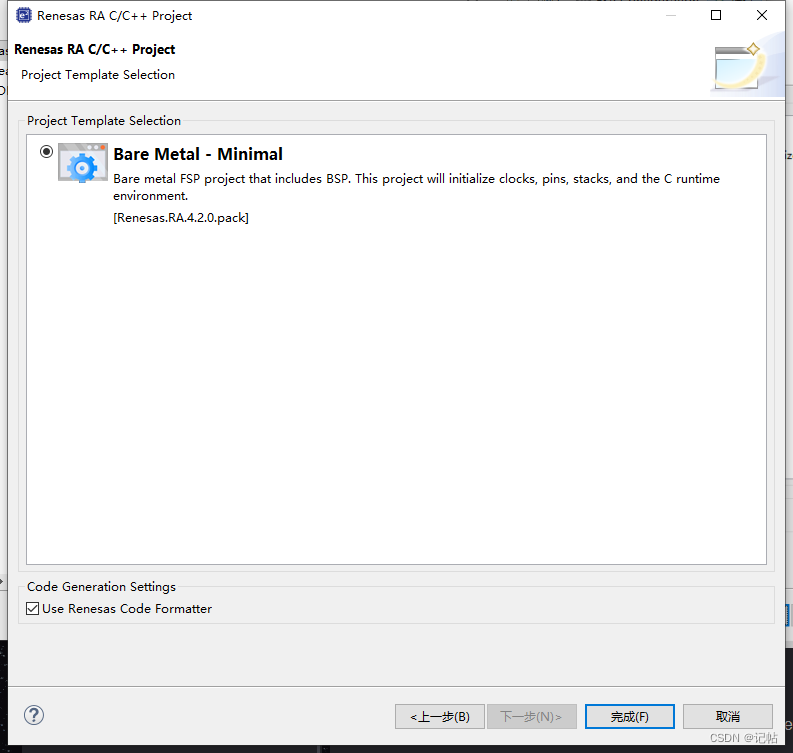
工程模板選擇
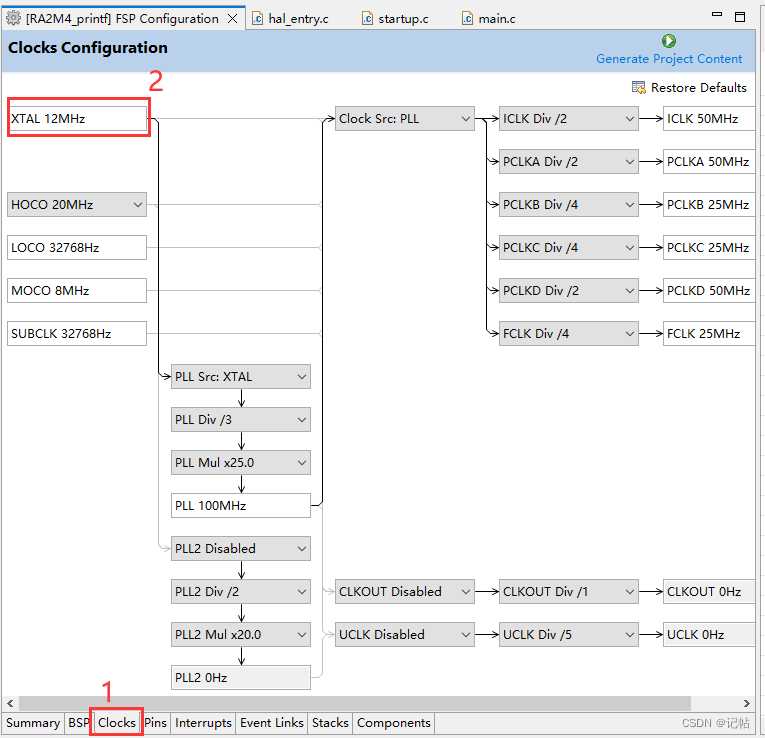
時鐘設置
開發板上的外部高速晶振為12M.
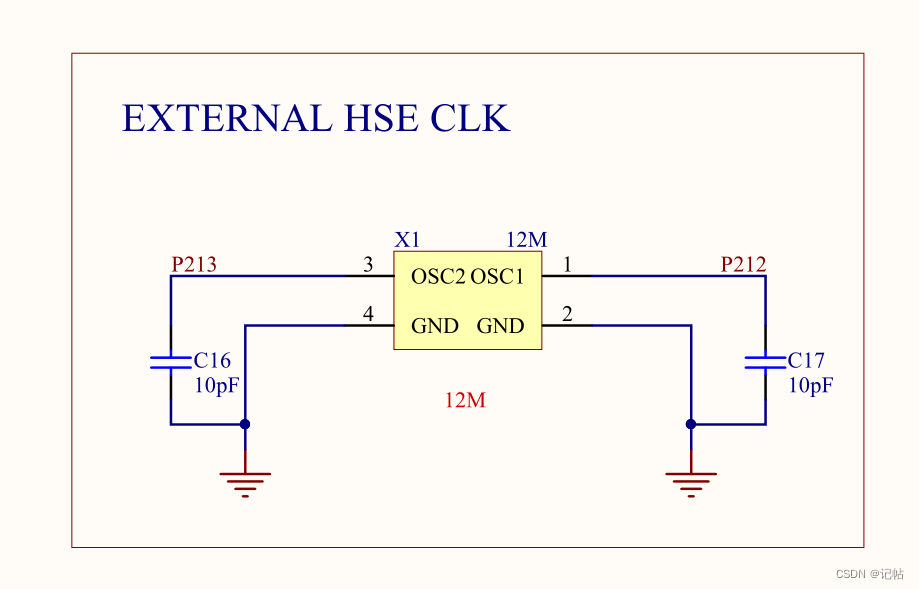
需要修改XTAL為12M。
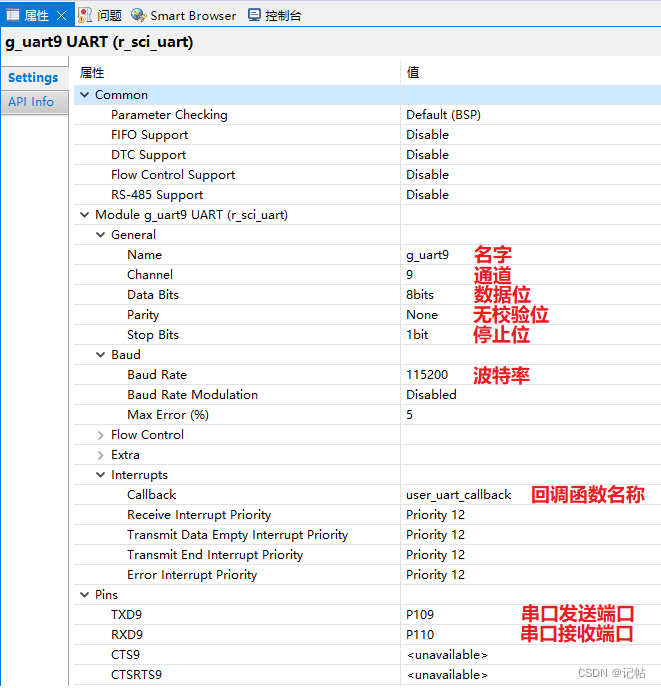
UART配置
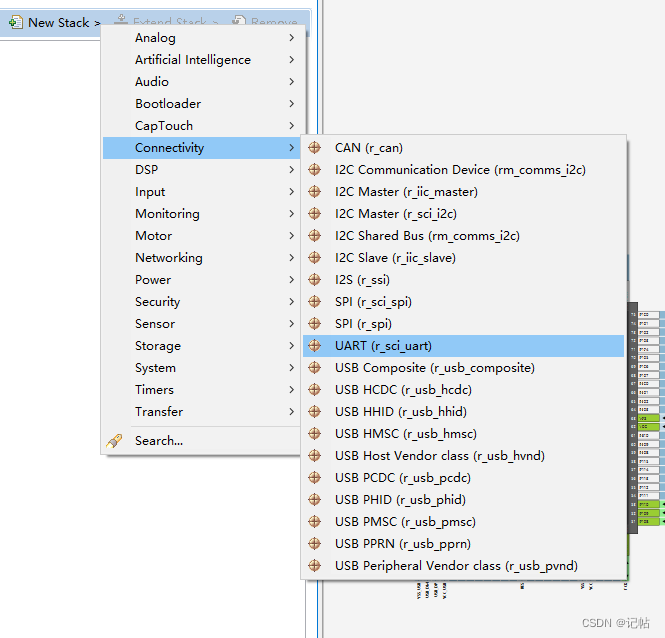
點擊Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
UART屬性配置
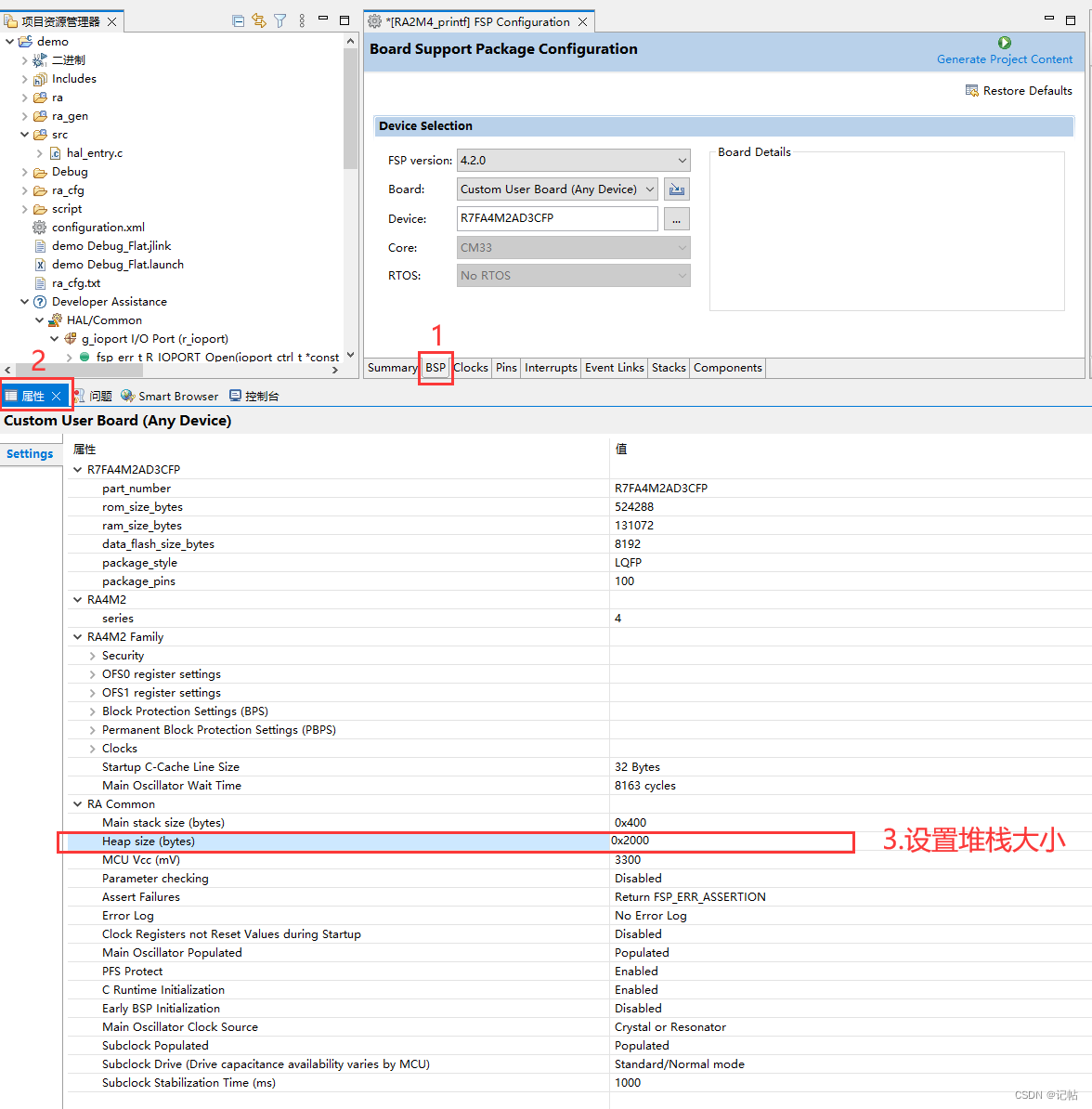
設置e2studio堆棧
printf函數通常需要設置堆棧大小。這是因為printf函數在運行時需要使用棧空間來存儲臨時變量和函數調用信息。如果堆棧大小不足,可能會導致程序崩潰或不可預期的行為。 printf函數使用了可變參數列表,它會在調用時使用棧來存儲參數,在函數調用結束時再清除參數,這需要足夠的棧空間。另外printf也會使用一些臨時變量,如果棧空間不足,會導致程序崩潰。 因此,為了避免這類問題,應該根據程序的需求來合理設置堆棧大小。
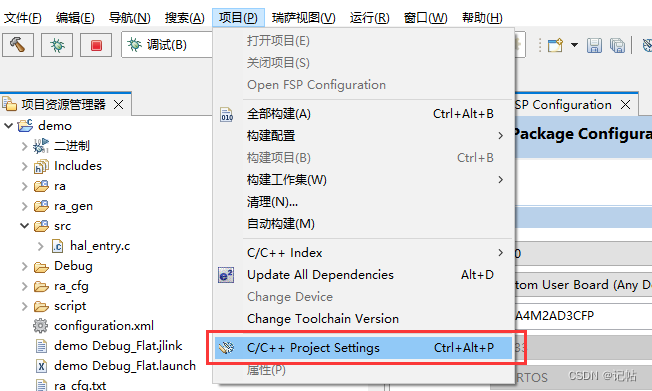
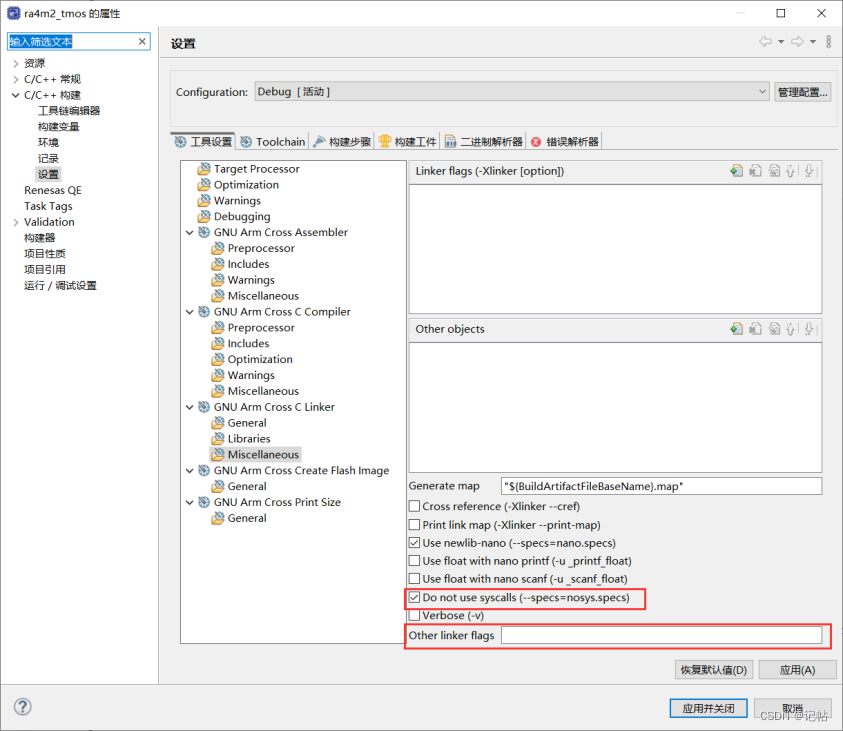
e2studio的重定向printf設置
在嵌入式系統的開發中,尤其是在使用GNU編譯器集合(GCC)時,–specs 參數用于指定鏈接時使用的系統規格(specs)文件。這些規格文件控制了編譯器和鏈接器的行為,尤其是關于系統庫和啟動代碼的鏈接。–specs=rdimon.specs 和 --specs=nosys.specs 是兩種常見的規格文件,它們用于不同的場景。
–specs=rdimon.specs
用途: 這個選項用于鏈接“Redlib”庫,這是為裸機(bare-metal)和半主機(semihosting)環境設計的C庫的一個變體。半主機環境是一種特殊的運行模式,允許嵌入式程序通過宿主機(如開發PC)的調試器進行輸入輸出操作。
應用場景: 當你需要在沒有完整操作系統的環境中運行程序,但同時需要使用調試器來處理輸入輸出(例如打印到宿主機的終端),這個選項非常有用。
特點: 它提供了一些基本的系統調用,通過調試接口與宿主機通信。
–specs=nosys.specs
用途: 這個選項鏈接了一個非常基本的系統庫,這個庫不提供任何系統服務的實現。
應用場景: 適用于完全的裸機程序,其中程序不執行任何操作系統調用,比如不進行文件操作或者系統級輸入輸出。
特點: 這是一個更“裸”的環境,沒有任何操作系統支持。使用這個規格文件,程序不期望有操作系統層面的任何支持。
如果你的程序需要與宿主機進行交互(如在開發期間的調試),并且通過調試器進行基本的輸入輸出操作,則使用 --specs=rdimon.specs。
如果你的程序是完全獨立的,不需要任何形式的操作系統服務,包括不進行任何系統級的輸入輸出,則使用 --specs=nosys.specs。
R_SCI_UART_Open()函數原型
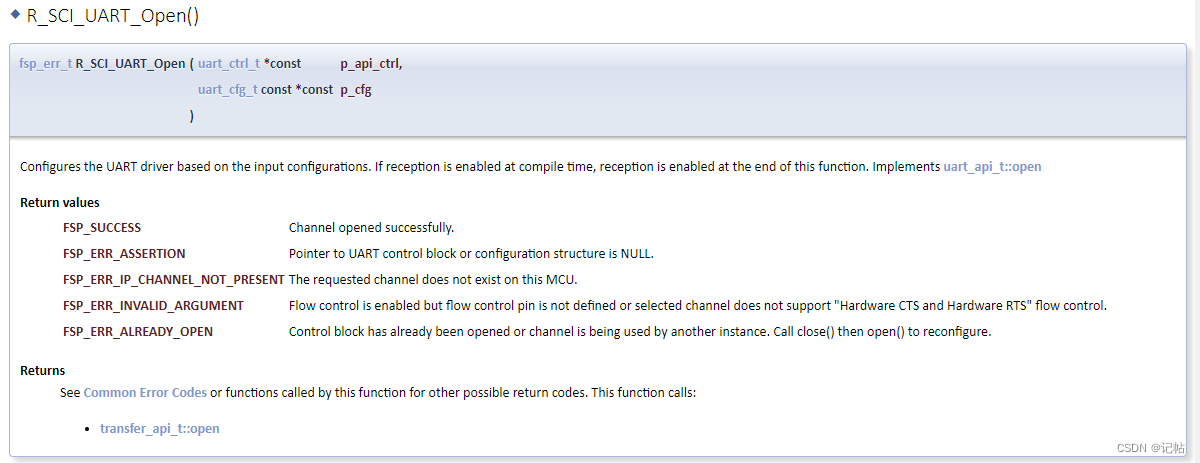
故可以用 R_SCI_UART_Open()函數進行配置,開啟和初始化UART。
/* Open the transfer instance with initial configuration. */ err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg); assert(FSP_SUCCESS == err);
回調函數user_uart_callback ()
當數據發送的時候,可以查看UART_EVENT_TX_COMPLETE來判斷是否發送完畢。
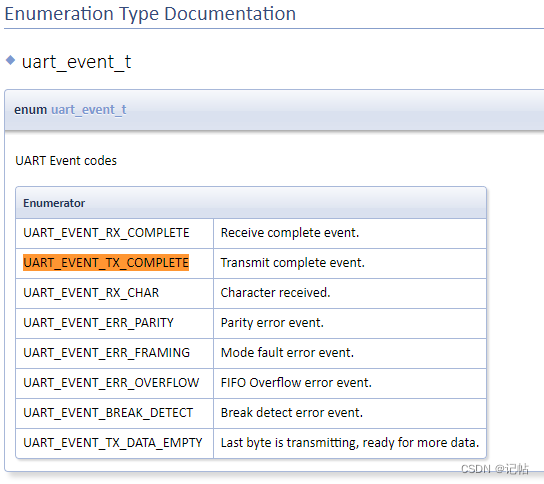
可以檢查檢查 "p_args" 結構體中的 "event" 字段的值是否等于 "UART_EVENT_TX_COMPLETE"。如果條件為真,那么 if 語句后面的代碼塊將會執行。
fsp_err_t err = FSP_SUCCESS; volatile bool uart_send_complete_flag = false; void user_uart_callback (uart_callback_args_t * p_args) { if(p_args- >event == UART_EVENT_TX_COMPLETE) { uart_send_complete_flag = true; } }
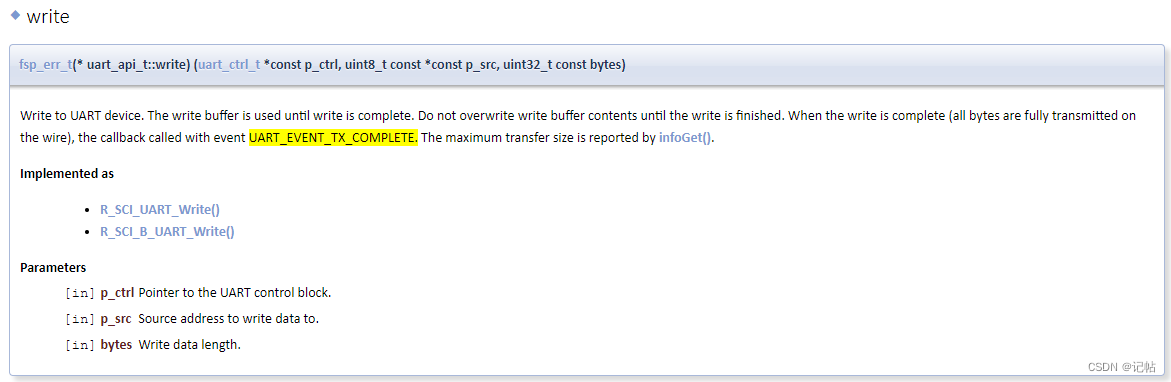
printf輸出重定向到串口
打印最常用的方法是printf,所以要解決的問題是將printf的輸出重定向到串口,然后通過串口將數據發送出去。 注意一定要加上頭文件#include
#ifdef __GNUC__ //串口重定向 #define PUTCHAR_PROTOTYPE int __io_putchar(int ch) #else #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f) #endif PUTCHAR_PROTOTYPE { err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1); if(FSP_SUCCESS != err) __BKPT(); while(uart_send_complete_flag == false){} uart_send_complete_flag = false; return ch; } int _write(int fd,char *pBuffer,int size) { for(int i=0;i< size;i++) { __io_putchar(*pBuffer++); } return size; }
IIC屬性配置
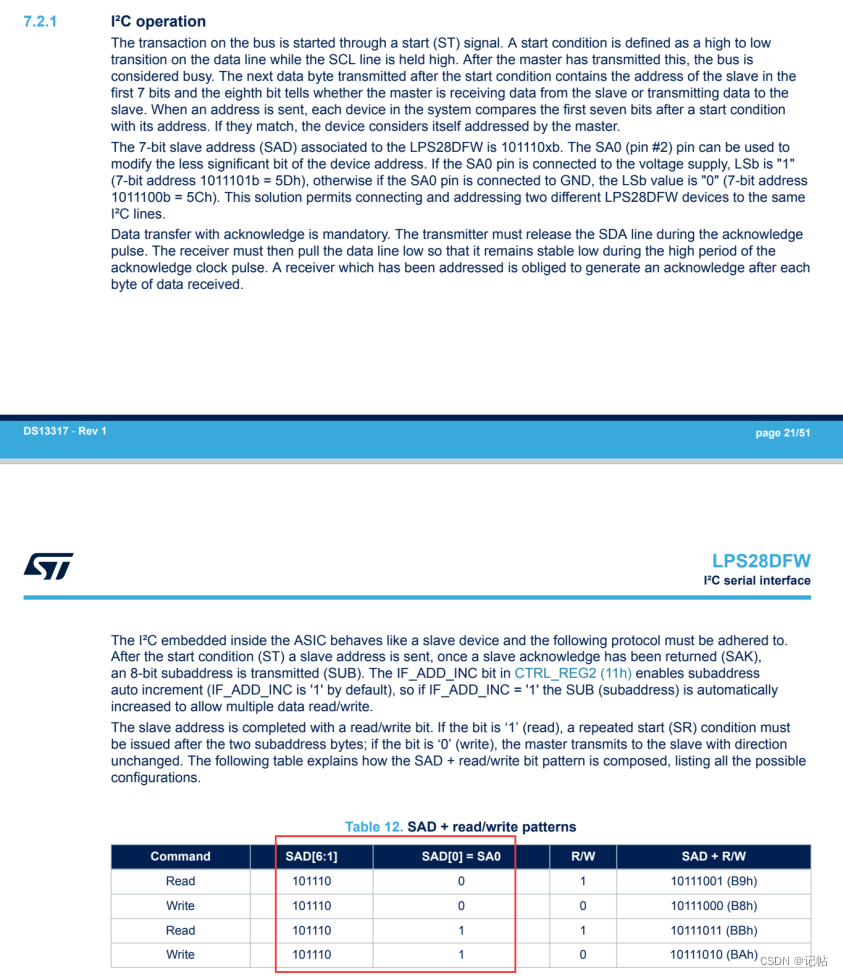
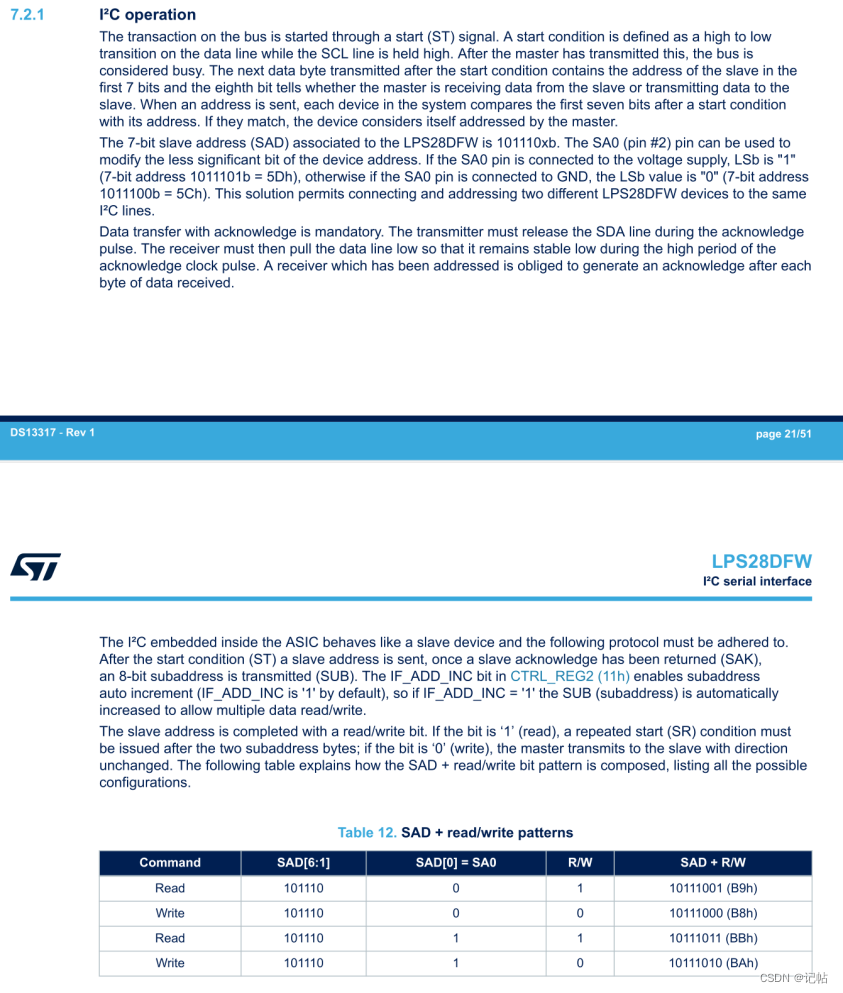
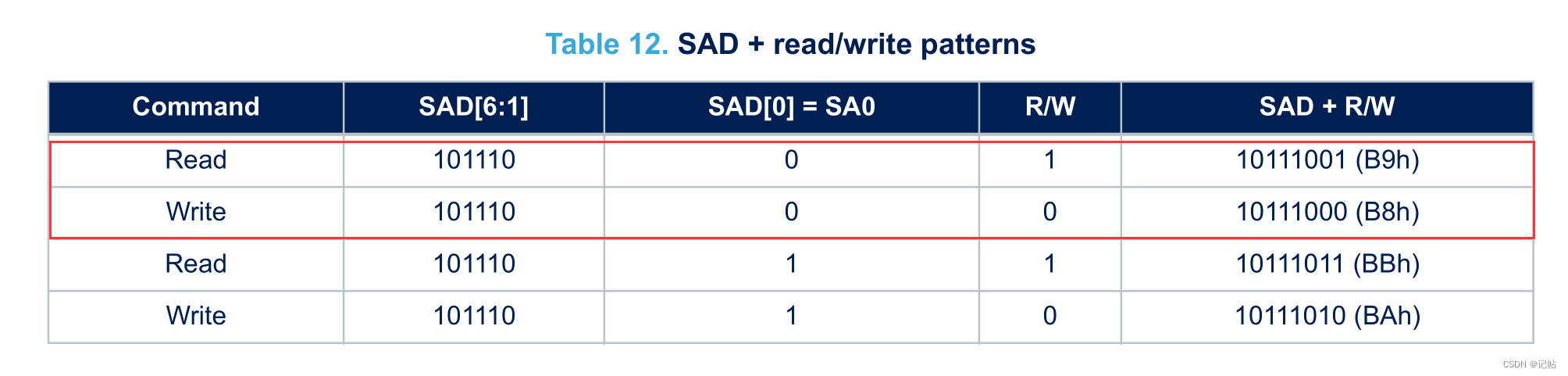
查看手冊,可以得知LPS28DFW的IIC地址為“1011100” 或者 “1011101”,即0x5C或0x5D。
IIC配置
配置RA4M2的I2C接口,使其作為I2C master進行通信。 查看開發板原理圖,對應的IIC為P407和P408。
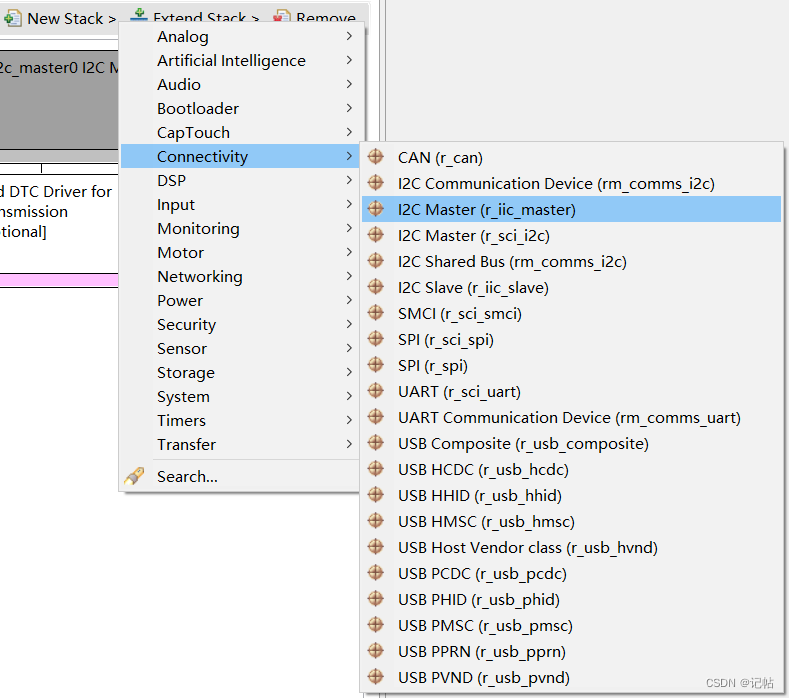
點擊Stacks->New Stack->Connectivity -> I2C Master(r_iic_master)。
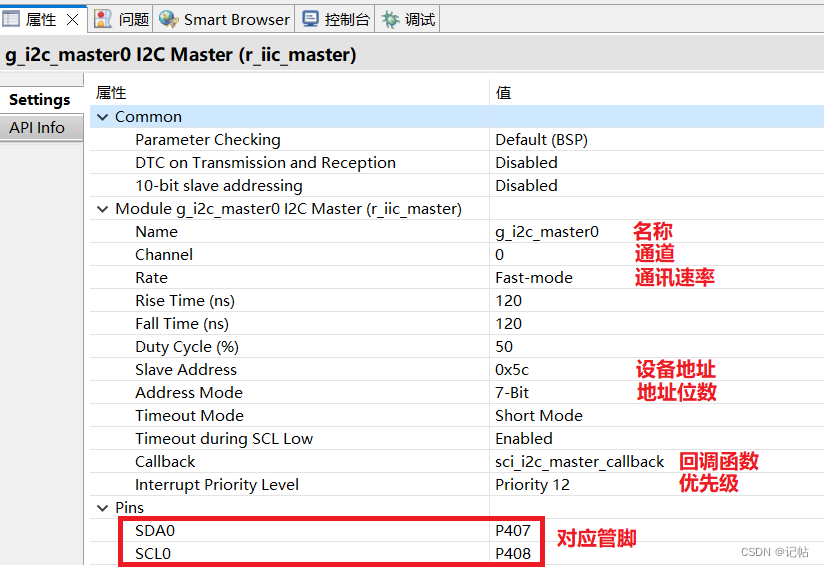
設置IIC的配置,需要注意從機的地址。
R_IIC_MASTER_Open()函數原型
R_IIC_MASTER_Open()函數為執行IIC初始化,開啟配置如下所示。
/* Initialize the I2C module */ err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg); /* Handle any errors. This function should be defined by the user. */ assert(FSP_SUCCESS == err);
R_IIC_MASTER_Write()函數原型
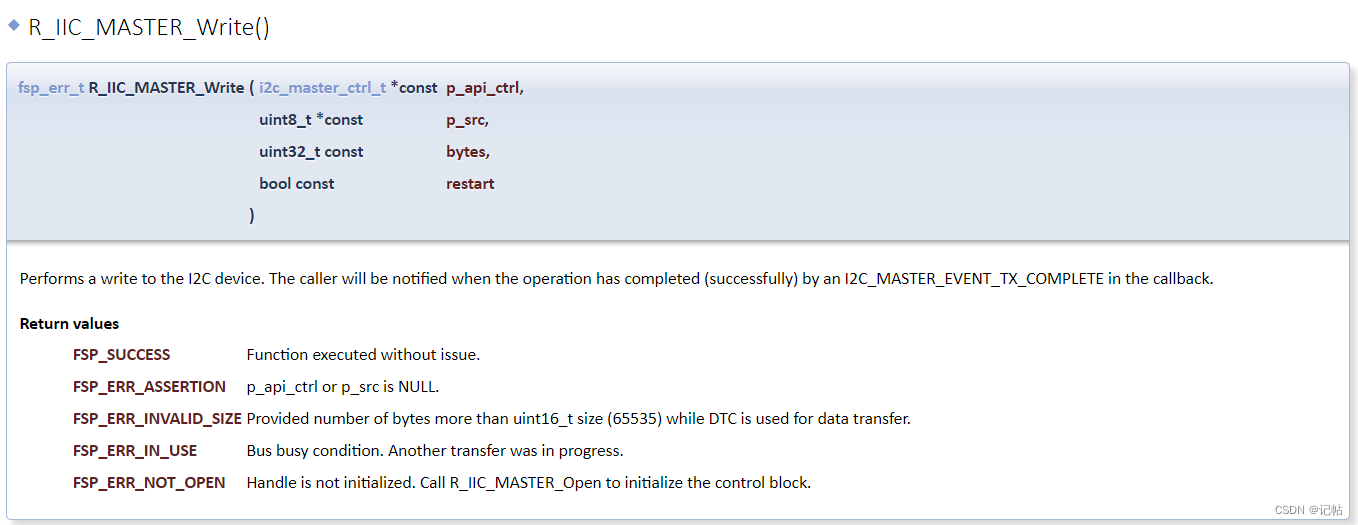
R_IIC_MASTER_Write()函數是向IIC設備中寫入數據,寫入格式如下所示。
err = R_IIC_MASTER_Write(&g_i2c_master0_ctrl, ?, 1, true); assert(FSP_SUCCESS == err);
R_IIC_MASTER_Read()函數原型
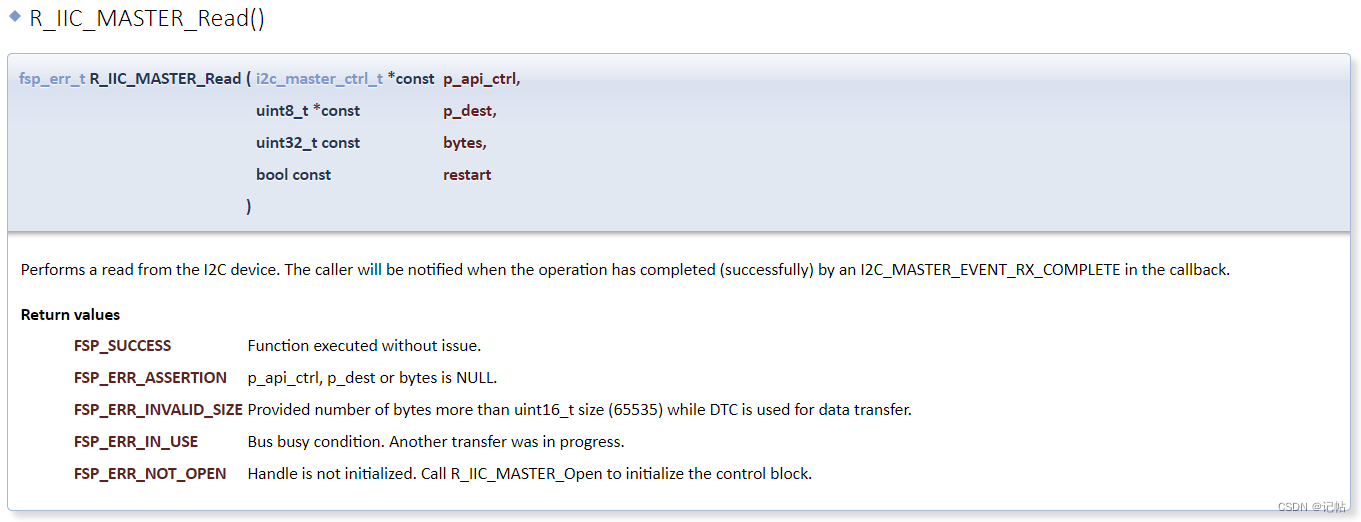
R_SCI_I2C_Read()函數是向IIC設備中讀取數據,讀取格式如下所示。
/* Read data from I2C slave */ err = R_IIC_MASTER_Read(&g_i2c_master0_ctrl, bufp, len, false); assert(FSP_SUCCESS == err);
sci_i2c_master_callback()回調函數
對于數據是否發送完畢,可以查看是否獲取到I2C_MASTER_EVENT_TX_COMPLETE字段。
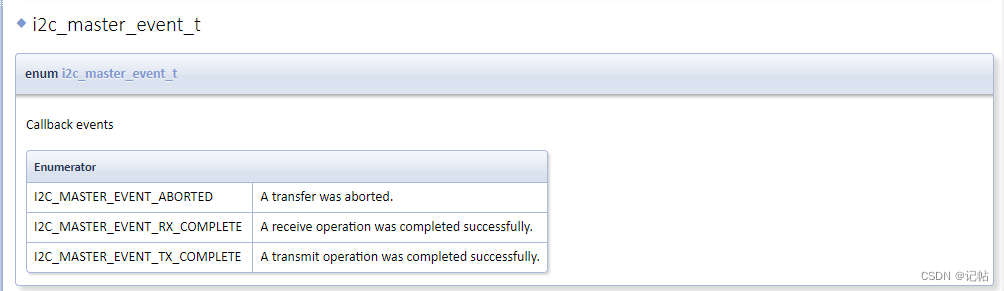
/* Callback function */ i2c_master_event_t i2c_event = I2C_MASTER_EVENT_ABORTED; uint32_t timeout_ms = 100000; void sci_i2c_master_callback(i2c_master_callback_args_t *p_args) { i2c_event = I2C_MASTER_EVENT_ABORTED; if (NULL != p_args) { /* capture callback event for validating the i2c transfer event*/ i2c_event = p_args- >event; } }
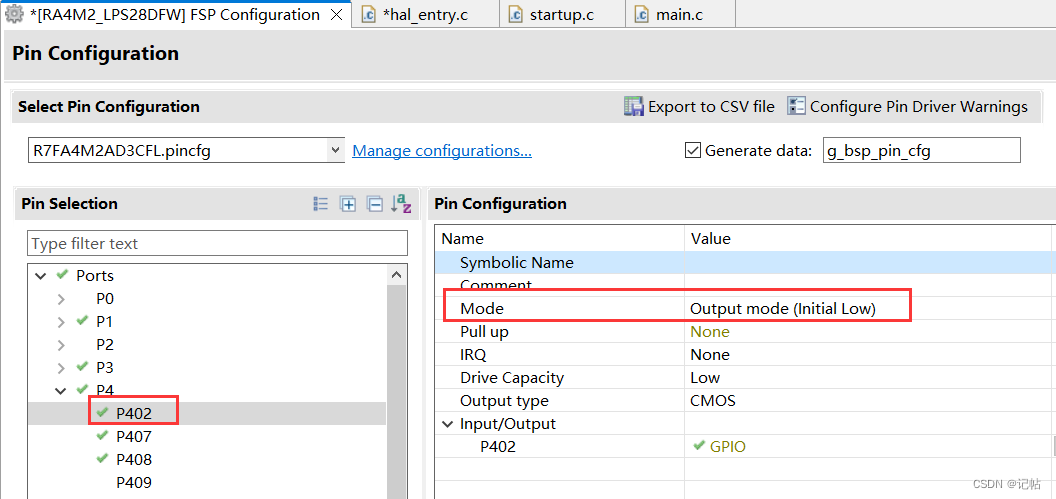
SA0地址設置
通過設置SA0管腳的高低電平可以改變模塊的地址。
這里設置SA0管腳位輸出管腳。
參考程序
https://github.com/STMicroelectronics/lps28dfw-pid
SA0設置模塊地址
使能SA0為低電平,配置模塊地址。
lps28dfw_pin_int_route_t int_route; lps28dfw_all_sources_t all_sources; lps28dfw_bus_mode_t bus_mode; lps28dfw_stat_t status; stmdev_ctx_t dev_ctx; lps28dfw_id_t id; lps28dfw_md_t md; /* Initialize mems driver interface */ dev_ctx.write_reg = platform_write; dev_ctx.read_reg = platform_read; dev_ctx.handle = &SENSOR_BUS; HAL_GPIO_WritePin(SA0_GPIO_Port, SA0_Pin, GPIO_PIN_RESET); /* Wait sensor boot time */ platform_delay(BOOT_TIME);
獲取ID
可以向WHO_AM_I (0Fh)獲取固定值,判斷是否為0xB4

lps28dfw_id_get為獲取函數。
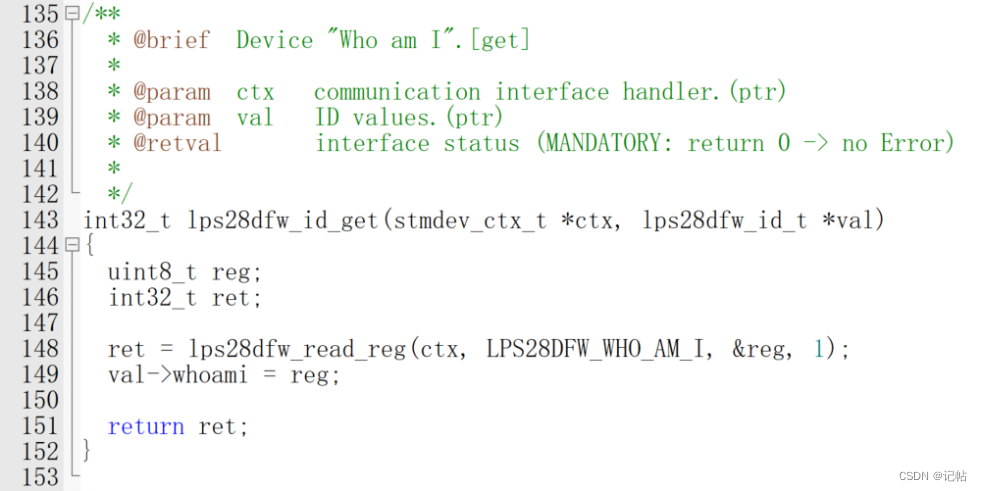
對應的獲取ID驅動程序,如下所示。
/* Check device ID */ lps28dfw_id_get(&dev_ctx, &id); printf("LPS28DFW_ID=0x%x,id.whoami=0x%xn",LPS28DFW_ID,id.whoami); if (id.whoami != LPS28DFW_ID) while(1);
復位操作
lps28dfw_init_set為重置函數。
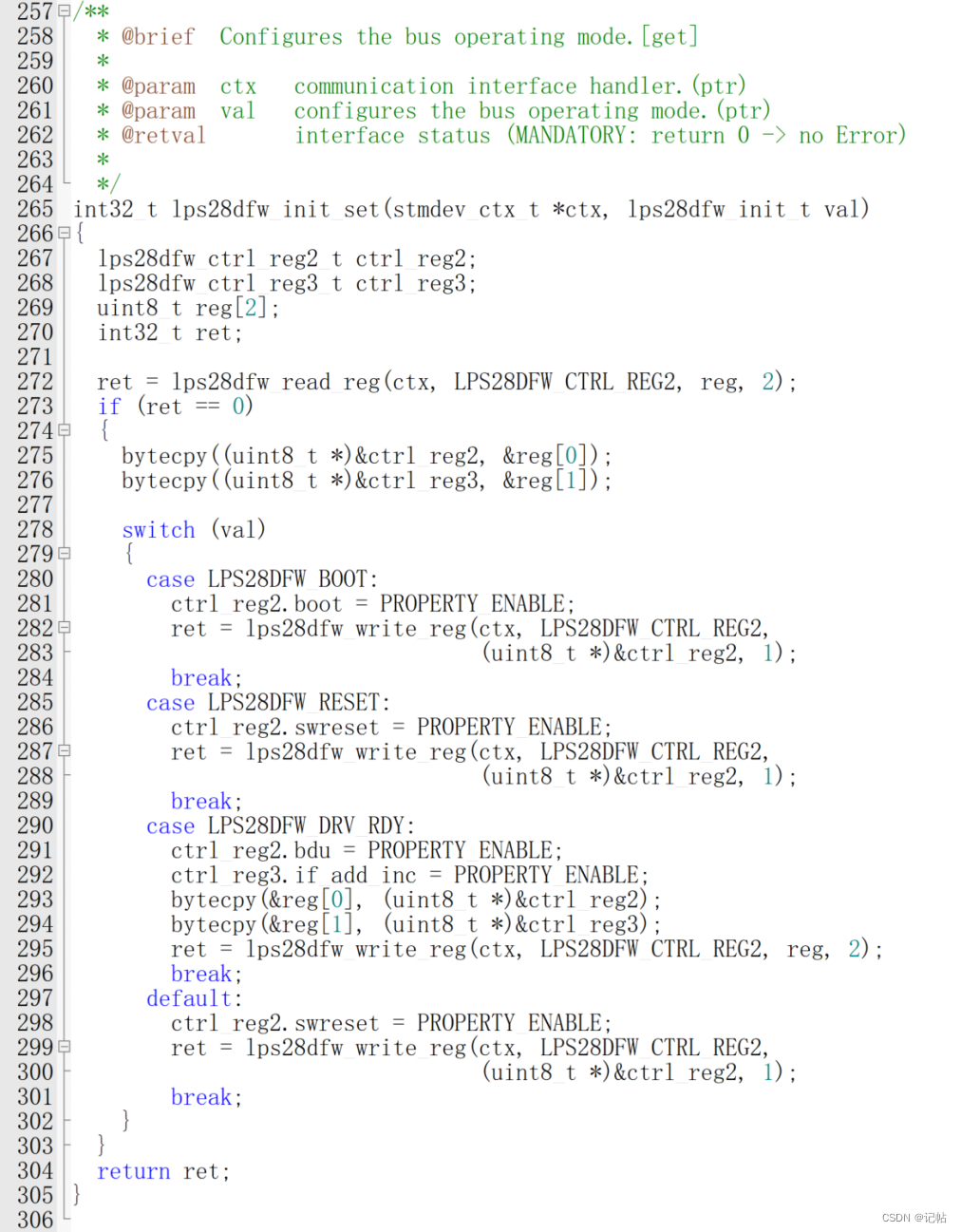
對應的驅動程序,如下所示。
/* Restore default configuration */ lps28dfw_init_set(&dev_ctx, LPS28DFW_RESET); do { lps28dfw_status_get(&dev_ctx, &status); } while (status.sw_reset);
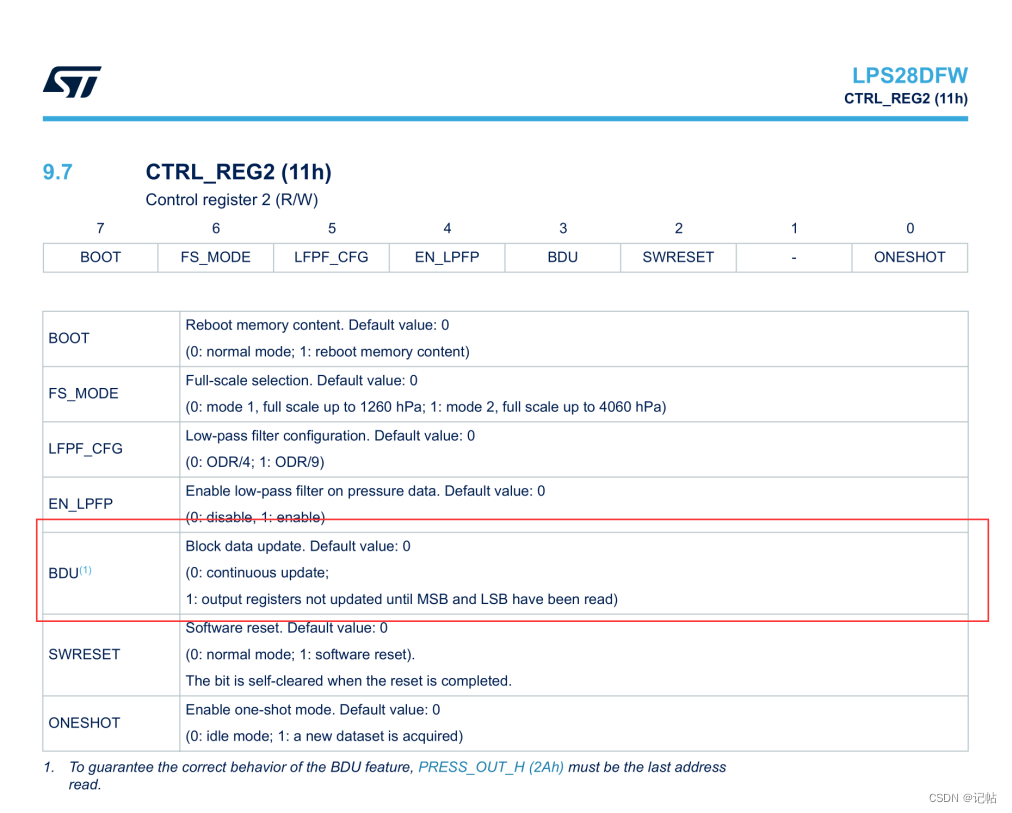
BDU設置
在很多傳感器中,數據通常被存儲在輸出寄存器中,這些寄存器分為兩部分:MSB和LSB。這兩部分共同表示一個完整的數據值。例如,在一個加速度計中,MSB和LSB可能共同表示一個加速度的測量值。
連續更新模式(BDU = '0'):在默認模式下,輸出寄存器的值會持續不斷地被更新。這意味著在你讀取MSB和LSB的時候,寄存器中的數據可能會因為新的測量數據而更新。這可能導致一個問題:當你讀取MSB時,如果寄存器更新了,接下來讀取的LSB可能就是新的測量值的一部分,而不是與MSB相對應的值。這樣,你得到的就是一個“拼湊”的數據,它可能無法準確代表任何實際的測量時刻。
塊數據更新(BDU)模式(BDU = '1'):當激活BDU功能時,輸出寄存器中的內容不會在讀取MSB和LSB之間更新。這就意味著一旦開始讀取數據(無論是先讀MSB還是LSB),寄存器中的那一組數據就被“鎖定”,直到兩部分都被讀取完畢。這樣可以確保你讀取的MSB和LSB是同一測量時刻的數據,避免了讀取到代表不同采樣時刻的數據。
簡而言之,BDU位的作用是確保在讀取數據時,輸出寄存器的內容保持穩定,從而避免讀取到拼湊或錯誤的數據。這對于需要高精度和穩定性的應用尤為重要。
可以向CFG_REG_C (62h)的BDU寄存器寫入1進行開啟。
對應的驅動程序,如下所示。
/* Set bdu and if_inc recommended for driver usage */ lps28dfw_init_set(&dev_ctx, LPS28DFW_DRV_RDY);
設置總線接口
/* Select bus interface */ bus_mode.filter = LPS28DFW_AUTO; bus_mode.interface = LPS28DFW_SEL_BY_HW; lps28dfw_bus_mode_set(&dev_ctx, &bus_mode);
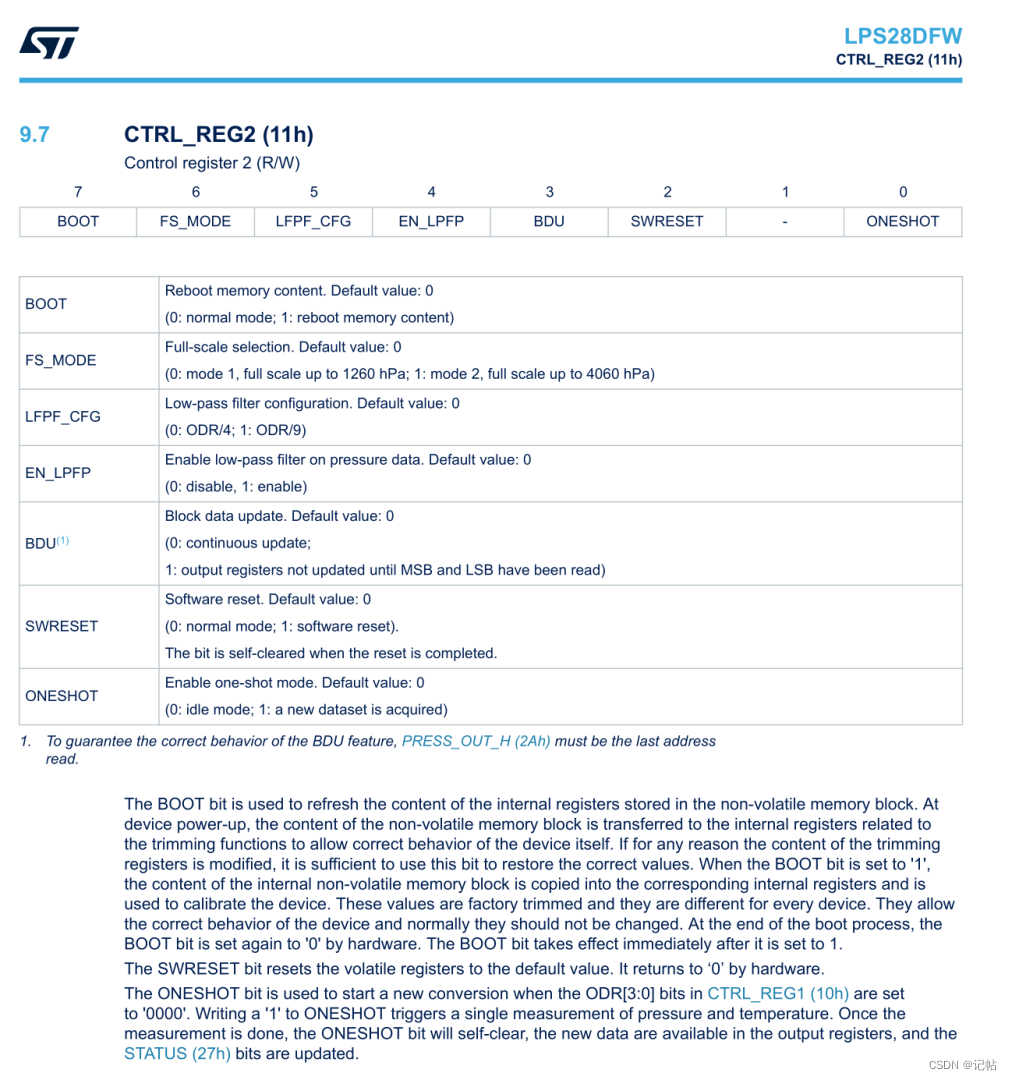
設置速率
設置速率和量程可以通過CTRL_REG1 (10h)和CTRL_REG2 (11h)進行設置。
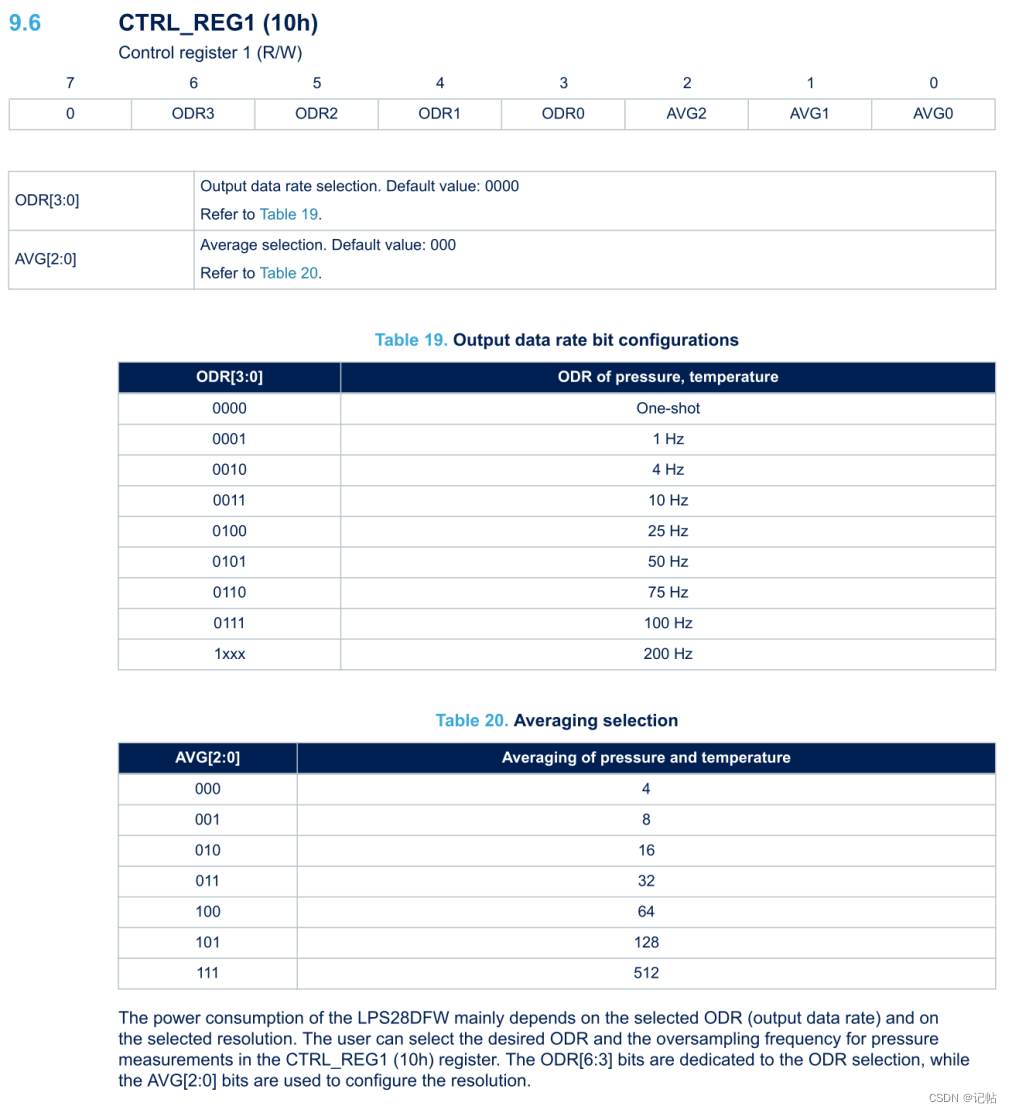
/* Set Output Data Rate */ md.odr = LPS28DFW_4Hz; md.avg = LPS28DFW_16_AVG; md.lpf = LPS28DFW_LPF_ODR_DIV_4; md.fs = LPS28DFW_1260hPa; lps28dfw_mode_set(&dev_ctx, &md);
中斷配置
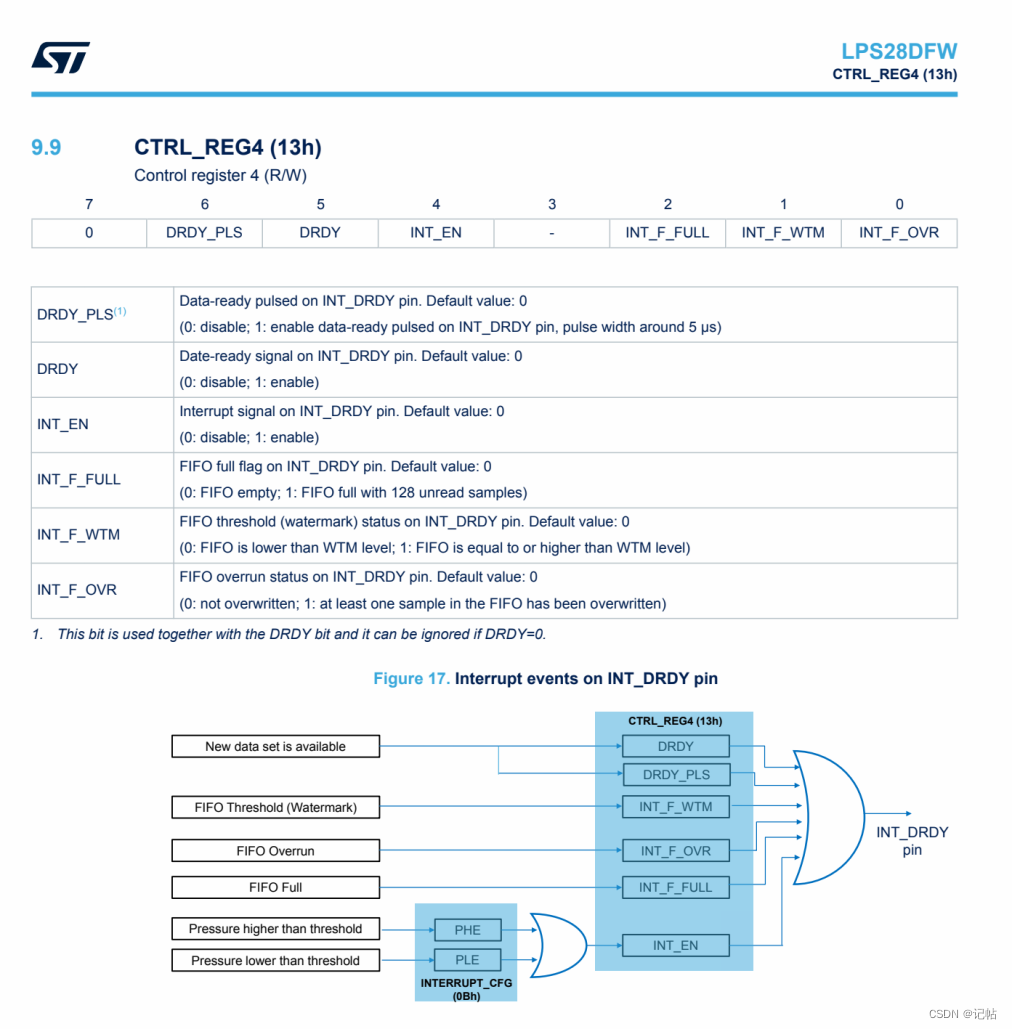
CTRL_REG4 (13h) 寄存器在 LPS28DFW 氣壓傳感器中用于控制與中斷相關的不同功能。以下是具體的位字段及其功能:
- DRDY_PLS (位 6):在 INT_DRDY 引腳上啟用數據就緒脈沖。默認值為 0(0:禁用;1:啟用在 INT_DRDY 引腳上的數據就緒脈沖,脈沖寬度約 5 微秒)。
- DRDY (位 5):在 INT_DRDY 引腳上的數據就緒信號。默認值為 0(0:禁用;1:啟用)。
- INT_EN (位 4):在 INT_DRDY 引腳上的中斷信號。默認值為 0(0:禁用;1:啟用)。
- INT_F_FULL (位 2):在 INT_DRDY 引腳上的 FIFO 滿標志。默認值為 0(0:FIFO 為空;1:FIFO 滿,有 128 個未讀樣本)。
- INT_F_WTM (位 1):在 INT_DRDY 引腳上的 FIFO 閾值(水位標記)狀態。默認值為 0(0:FIFO 低于 WTM 級別;1:FIFO 等于或高于 WTM 級別)。
- INT_F_OVR (位 0):在 INT_DRDY 引腳上的 FIFO 溢出狀態。默認值為 0(0:未溢出;1:FIFO 中至少有一個樣本被覆蓋)。 這些設置允許用戶配置傳感器的中斷行為,包括數據就緒通知、FIFO 相關的狀態通知等。通過正確配置這些位,可以根據特定的應用需求調整傳感器的行為,優化數據采集和處理效率。
/* Configure inerrupt pins */ lps28dfw_pin_int_route_get(&dev_ctx, &int_route); int_route.drdy_pres = PROPERTY_DISABLE; lps28dfw_pin_int_route_set(&dev_ctx, &int_route);
輪詢讀取數據
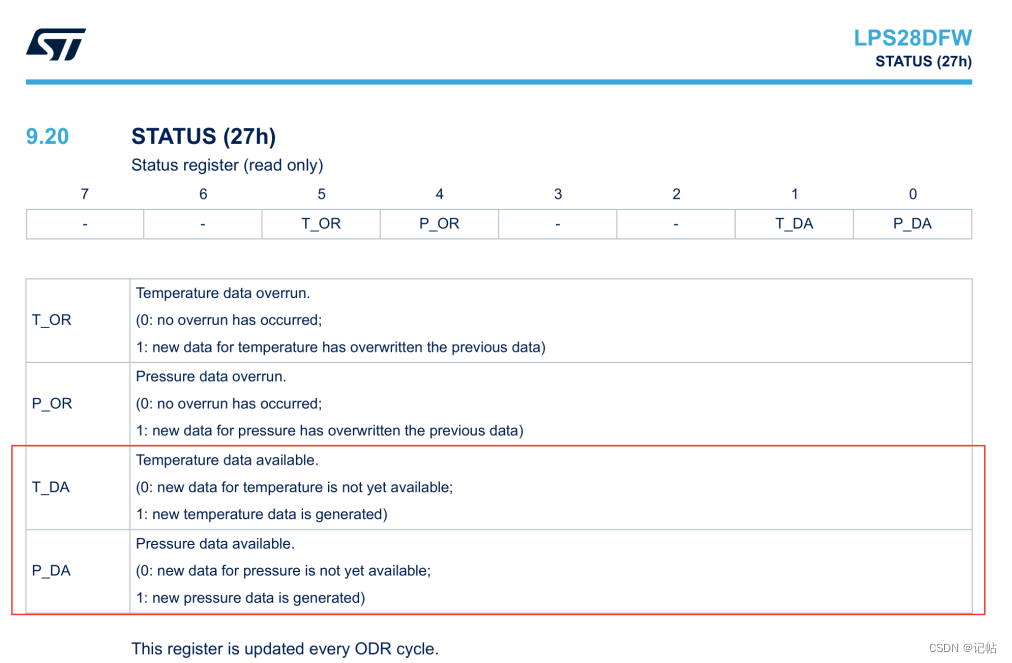
對于壓強和溫度數據是否準備好,可以查看STATUS (27h)的Zyxda位,判斷是否有新數據到達。
對于壓強數據,主要在PRESS_OUT_XL (28h)-PRESS_OUT_H (2Ah)。

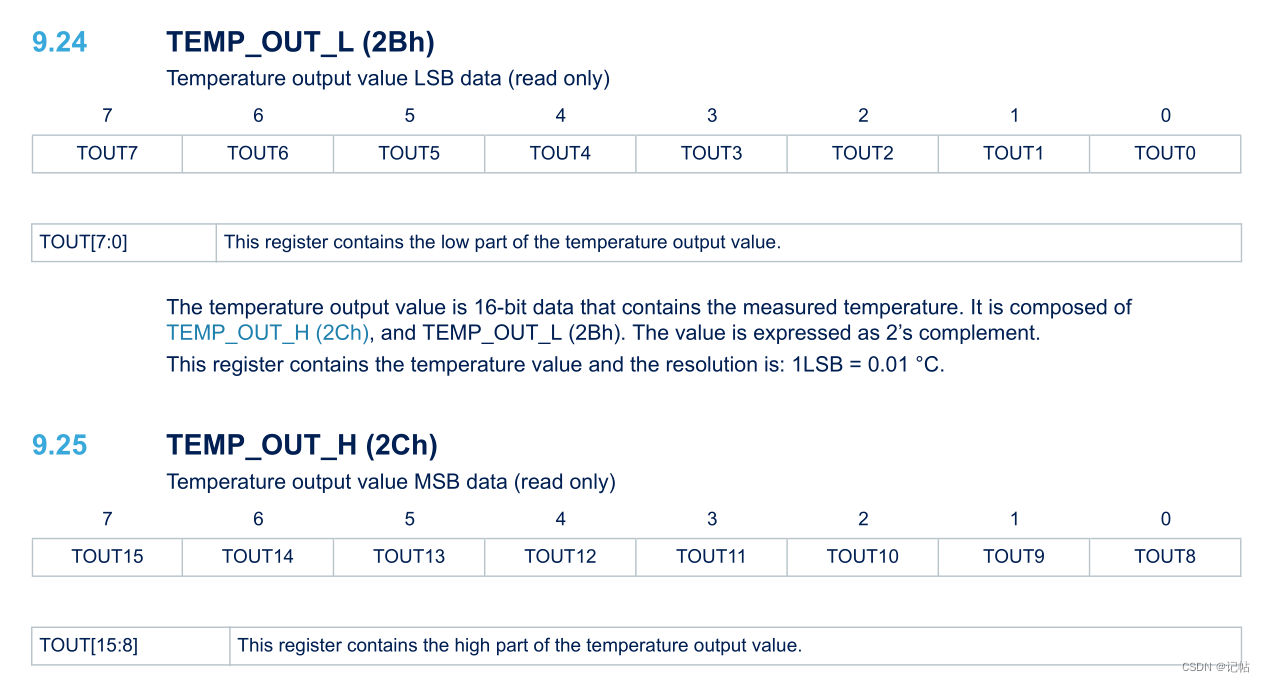
對于溫度數據,數據在TEMP_OUT_L (2Bh)-TEMP_OUT_H (2Ch)。
while (1) { /* Read output only if new values are available */ lps28dfw_all_sources_get(&dev_ctx, &all_sources); if ( all_sources.drdy_pres | all_sources.drdy_temp ) { lps28dfw_data_get(&dev_ctx, &md, &data); printf("pressure [hPa]:%6.2f temperature [degC]:%6.2frn",data.pressure.hpa, data.heat.deg_c); } }
演示
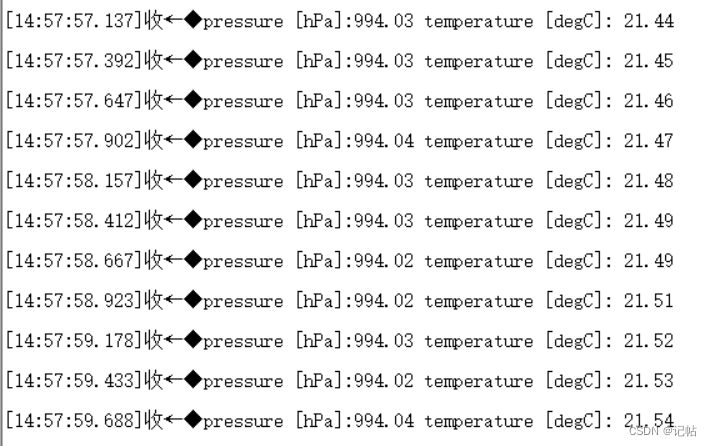
正常氣壓為50hPa到1050hPa之間。
主程序
#include "hal_data.h" #include "lps28dfw_reg.h" #include < stdio.h > fsp_err_t err = FSP_SUCCESS; volatile bool uart_send_complete_flag = false; void user_uart_callback (uart_callback_args_t * p_args) { if(p_args- >event == UART_EVENT_TX_COMPLETE) { uart_send_complete_flag = true; } } /* Callback function */ i2c_master_event_t i2c_event = I2C_MASTER_EVENT_ABORTED; uint32_t timeout_ms = 100000; void sci_i2c_master_callback(i2c_master_callback_args_t *p_args) { i2c_event = I2C_MASTER_EVENT_ABORTED; if (NULL != p_args) { /* capture callback event for validating the i2c transfer event*/ i2c_event = p_args- >event; } } #ifdef __GNUC__ //串口重定向 #define PUTCHAR_PROTOTYPE int __io_putchar(int ch) #else #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f) #endif PUTCHAR_PROTOTYPE { err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1); if(FSP_SUCCESS != err) __BKPT(); while(uart_send_complete_flag == false){} uart_send_complete_flag = false; return ch; } int _write(int fd,char *pBuffer,int size) { for(int i=0;i< size;i++) { __io_putchar(*pBuffer++); } return size; } FSP_CPP_HEADER void R_BSP_WarmStart(bsp_warm_start_event_t event); FSP_CPP_FOOTER #define BOOT_TIME 10 //ms #define SENSOR_BUS g_i2c_master0_ctrl /* Private variables ---------------------------------------------------------*/ static uint8_t tx_buffer[1000]; static lps28dfw_data_t data; /* Private functions ---------------------------------------------------------*/ /* * WARNING: * Functions declare in this section are defined at the end of this file * and are strictly related to the hardware platform used. * */ static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len); static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len); static void tx_com( uint8_t *tx_buffer, uint16_t len ); static void platform_delay(uint32_t ms); static void platform_init(void); /*******************************************************************************************************************//** * main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function * is called by main() when no RTOS is used. **********************************************************************************************************************/ void hal_entry(void) { /* TODO: add your own code here */ /* Open the transfer instance with initial configuration. */ err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg); assert(FSP_SUCCESS == err); printf("hello world!n"); /* Initialize the I2C module */ err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg); /* Handle any errors. This function should be defined by the user. */ assert(FSP_SUCCESS == err); R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_04_PIN_05, BSP_IO_LEVEL_LOW); lps28dfw_pin_int_route_t int_route; lps28dfw_all_sources_t all_sources; lps28dfw_bus_mode_t bus_mode; lps28dfw_stat_t status; stmdev_ctx_t dev_ctx; lps28dfw_id_t id; lps28dfw_md_t md; /* Initialize mems driver interface */ dev_ctx.write_reg = platform_write; dev_ctx.read_reg = platform_read; dev_ctx.handle = &SENSOR_BUS; /* Wait sensor boot time */ platform_delay(BOOT_TIME); /* Check device ID */ lps28dfw_id_get(&dev_ctx, &id); printf("LPS28DFW_ID=0x%x,id.whoami=0x%xn",LPS28DFW_ID,id.whoami); if (id.whoami != LPS28DFW_ID) while(1); /* Restore default configuration */ lps28dfw_init_set(&dev_ctx, LPS28DFW_RESET); do { lps28dfw_status_get(&dev_ctx, &status); } while (status.sw_reset); /* Set bdu and if_inc recommended for driver usage */ lps28dfw_init_set(&dev_ctx, LPS28DFW_DRV_RDY); /* Select bus interface */ bus_mode.filter = LPS28DFW_AUTO; bus_mode.interface = LPS28DFW_SEL_BY_HW; lps28dfw_bus_mode_set(&dev_ctx, &bus_mode); /* Set Output Data Rate */ md.odr = LPS28DFW_4Hz; md.avg = LPS28DFW_16_AVG; md.lpf = LPS28DFW_LPF_ODR_DIV_4; md.fs = LPS28DFW_1260hPa; lps28dfw_mode_set(&dev_ctx, &md); /* Configure inerrupt pins */ lps28dfw_pin_int_route_get(&dev_ctx, &int_route); int_route.drdy_pres = PROPERTY_DISABLE; lps28dfw_pin_int_route_set(&dev_ctx, &int_route); while (1) { /* Read output only if new values are available */ lps28dfw_all_sources_get(&dev_ctx, &all_sources); if ( all_sources.drdy_pres | all_sources.drdy_temp ) { lps28dfw_data_get(&dev_ctx, &md, &data); printf("pressure [hPa]:%6.2f temperature [degC]:%6.2frn",data.pressure.hpa, data.heat.deg_c); } } #if BSP_TZ_SECURE_BUILD /* Enter non-secure code */ R_BSP_NonSecureEnter(); #endif }
-
mcu
+關注
關注
146文章
16481瀏覽量
346631 -
Studio
+關注
關注
2文章
187瀏覽量
28513 -
氣壓計
+關注
關注
1文章
43瀏覽量
18217
發布評論請先 登錄
相關推薦
e2studio開發LPS28DFW氣壓計(2)----水壓檢測

氣壓計LPS22HB開發(1)----輪詢獲取氣壓計數據
氣壓計LPS25HB開發(1)----輪詢獲取氣壓計數據
MS4525DO-SS3BJ015AS氣壓計怎么換算高度
e2studio開發LPS28DFW氣壓計(2)----水壓檢測
e2studio開發LPS28DFW氣壓計(1)----輪詢獲取氣壓計數據
氣壓計LPS28DFW開發(2)----水壓檢測
氣壓計LPS28DFW開發(1)----輪詢獲取氣壓計數據





 工商網監
工商網監
評論