") e2studio開發(fā)三軸加速度計(jì)LIS2DW12(1)----輪詢獲取加速度數(shù)據(jù)
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(1)----輪詢獲取加速度數(shù)據(jù)
概述
本文將介紹如何驅(qū)動(dòng)和利用LIS2DW12傳感器,實(shí)現(xiàn)精確的運(yùn)動(dòng)感應(yīng)功能。
IS2DW12是一款高性能、超低功耗的三軸線性加速度計(jì),屬于“femto”系列,利用了成熟的微機(jī)械加速度計(jì)制造工藝。這個(gè)傳感器提供可選擇的全量程±2g/±4g/±8g/±16g,能夠以1.6 Hz至1600 Hz的數(shù)據(jù)輸出率測(cè)量加速度。它包含了一個(gè)32級(jí)的先進(jìn)先出(FIFO)緩沖區(qū),用于存儲(chǔ)數(shù)據(jù),以減少主處理器的干預(yù)需求。
此外,LIS2DW12具備自測(cè)功能,可在最終應(yīng)用中驗(yàn)證傳感器功能,并集成了一個(gè)處理運(yùn)動(dòng)和加速度檢測(cè)的內(nèi)部引擎。這包括自由落體、喚醒、敲擊識(shí)別、活動(dòng)/靜止監(jiān)測(cè)、靜止/運(yùn)動(dòng)檢測(cè)、縱向/橫向檢測(cè)以及6D/4D定向等功能。
通信模式
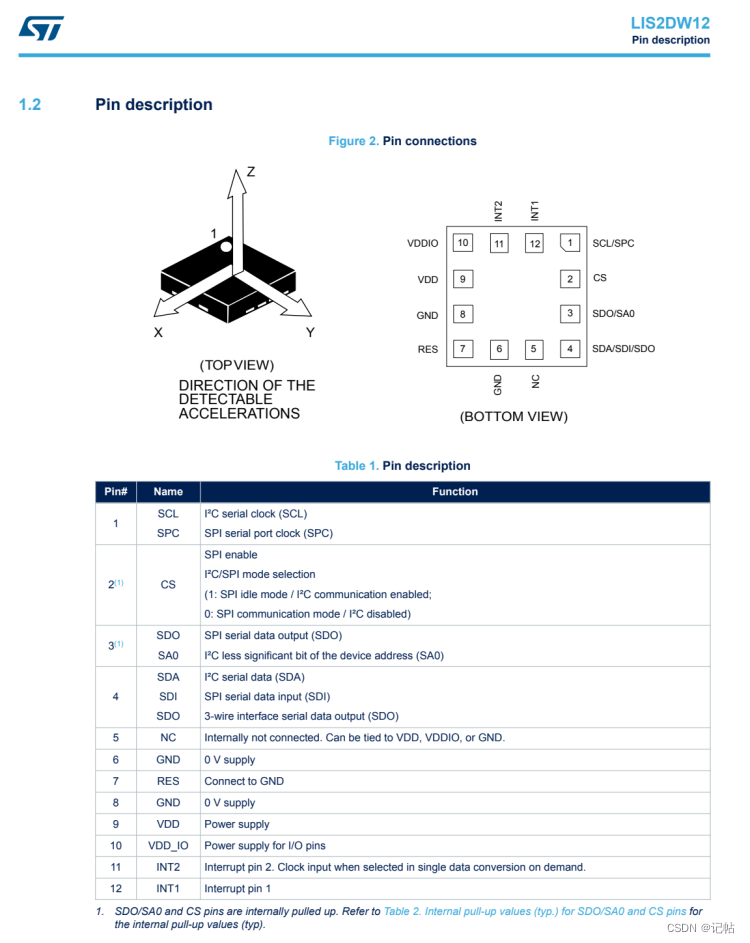
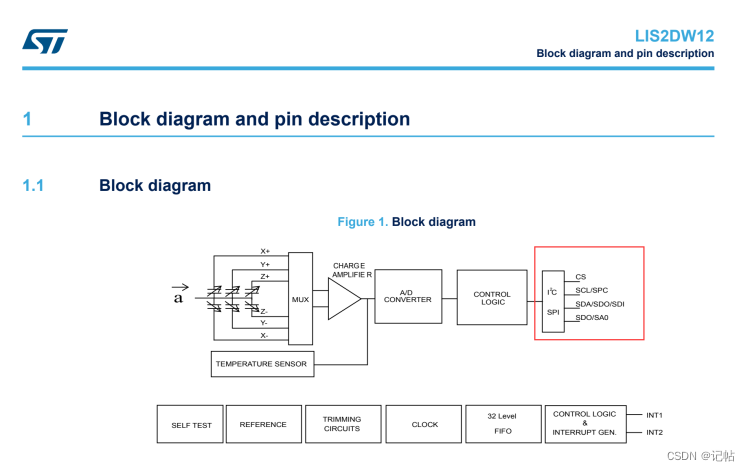
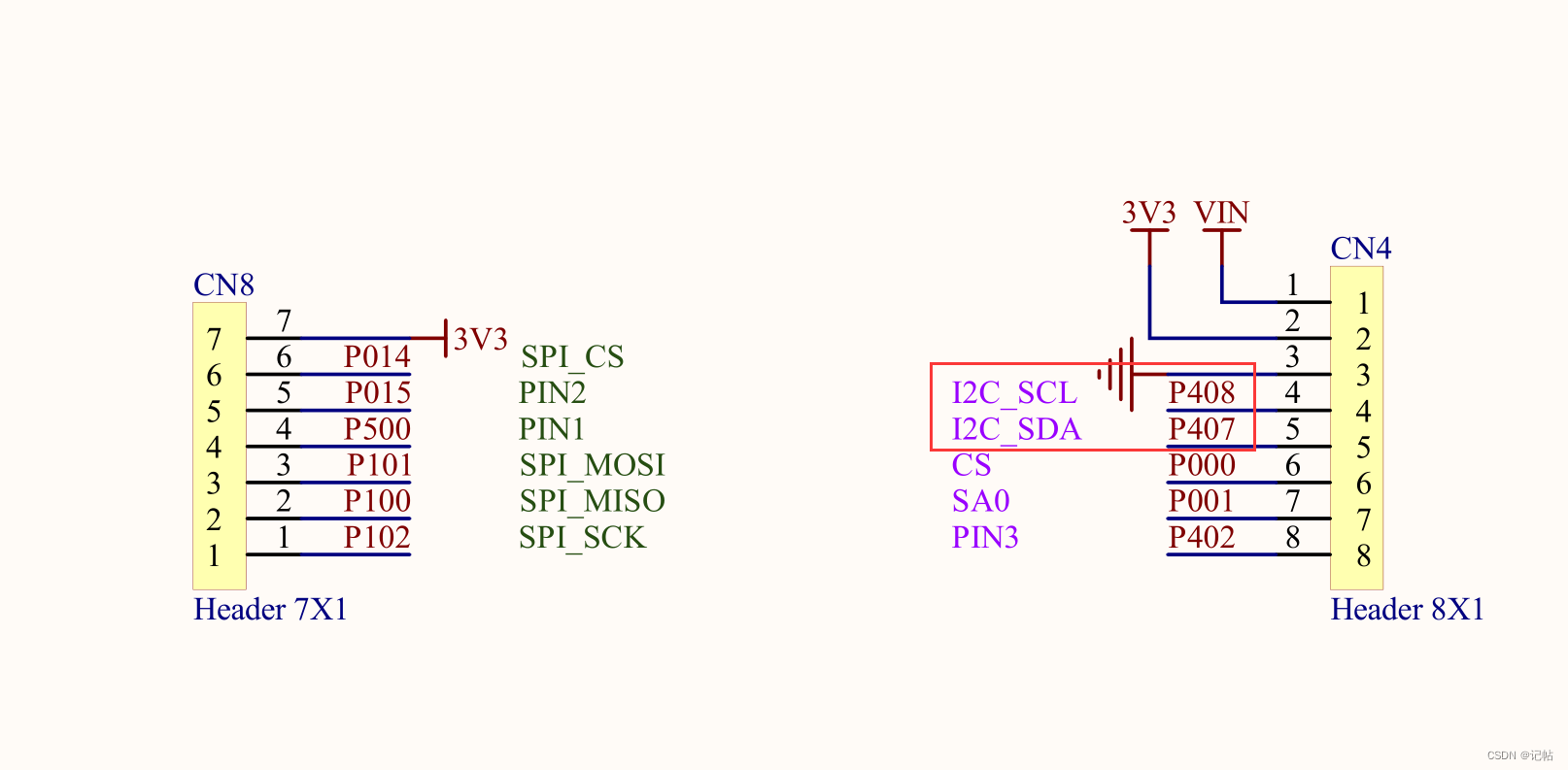
對(duì)于LIS2DW12,可以使用SPI或者IIC進(jìn)行通訊。 最小系統(tǒng)圖如下所示。
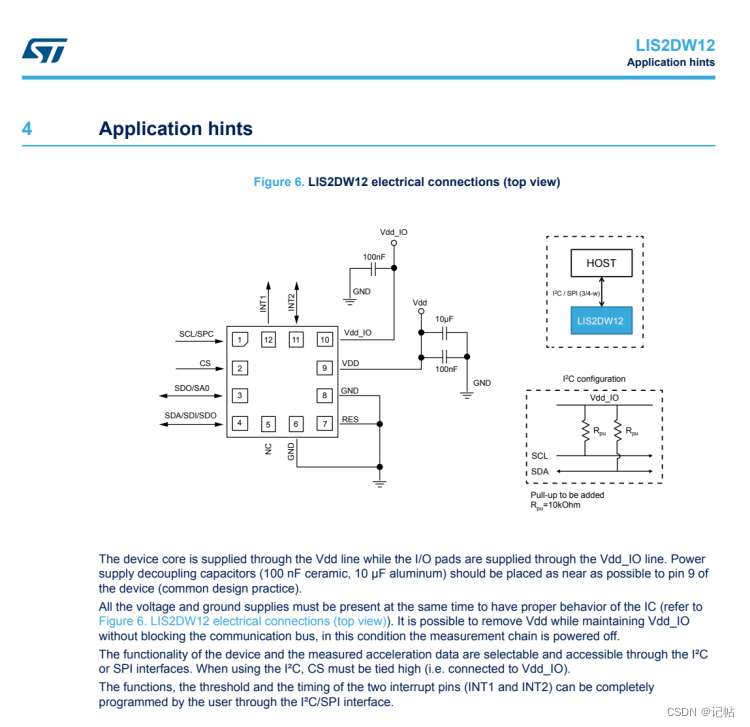
在CS管腳為1的時(shí)候,為IIC模式。
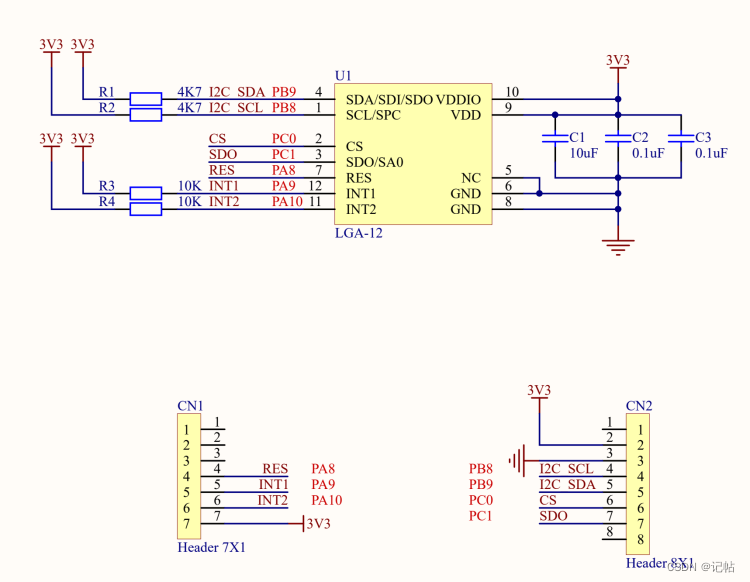
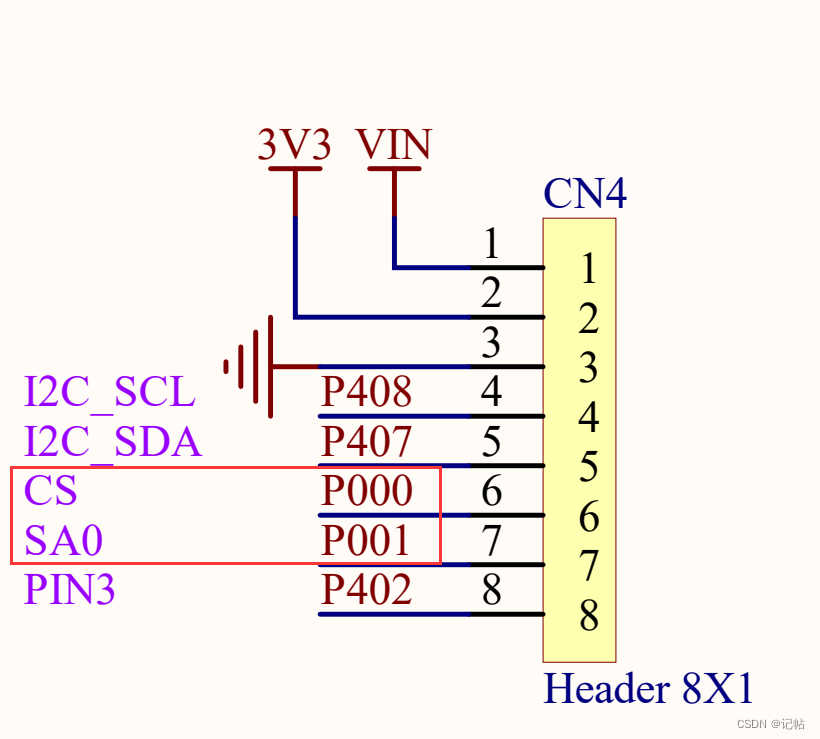
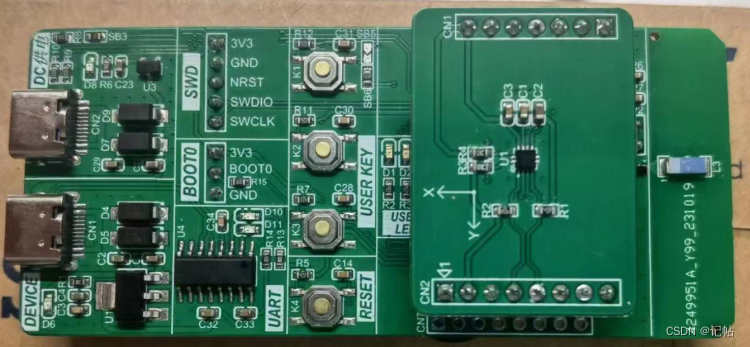
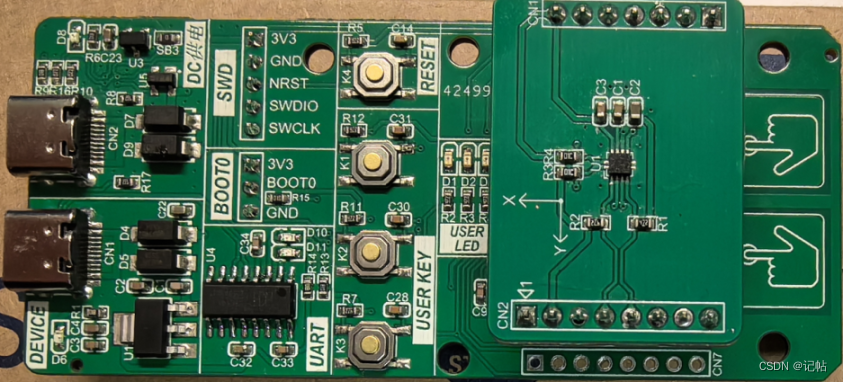
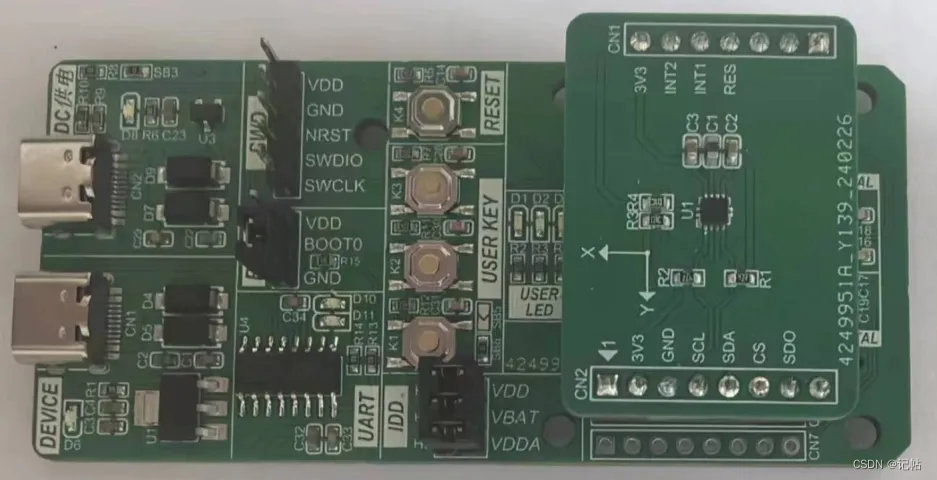
本文使用的板子原理圖如下所示。
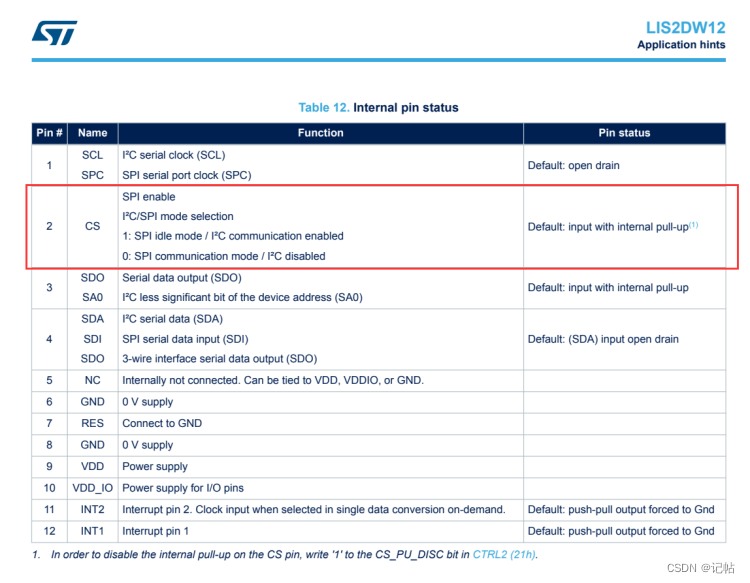
管腳定義
IIC通信模式
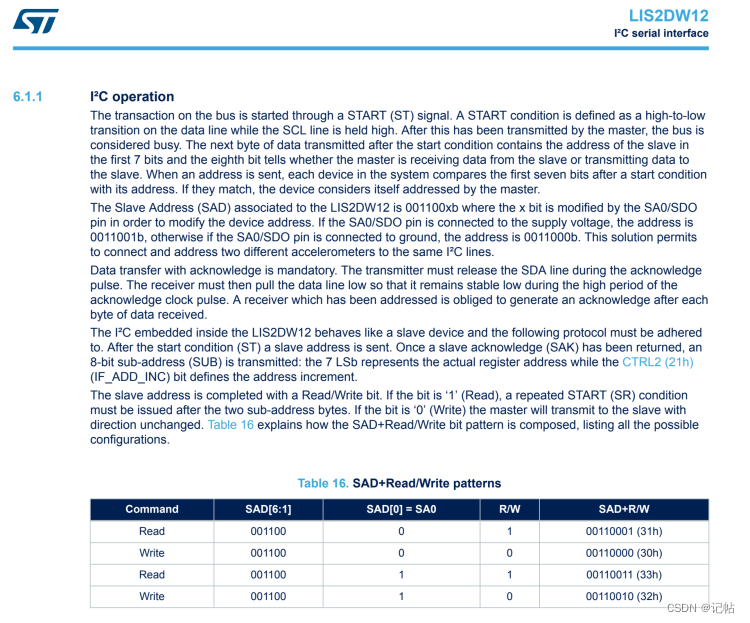
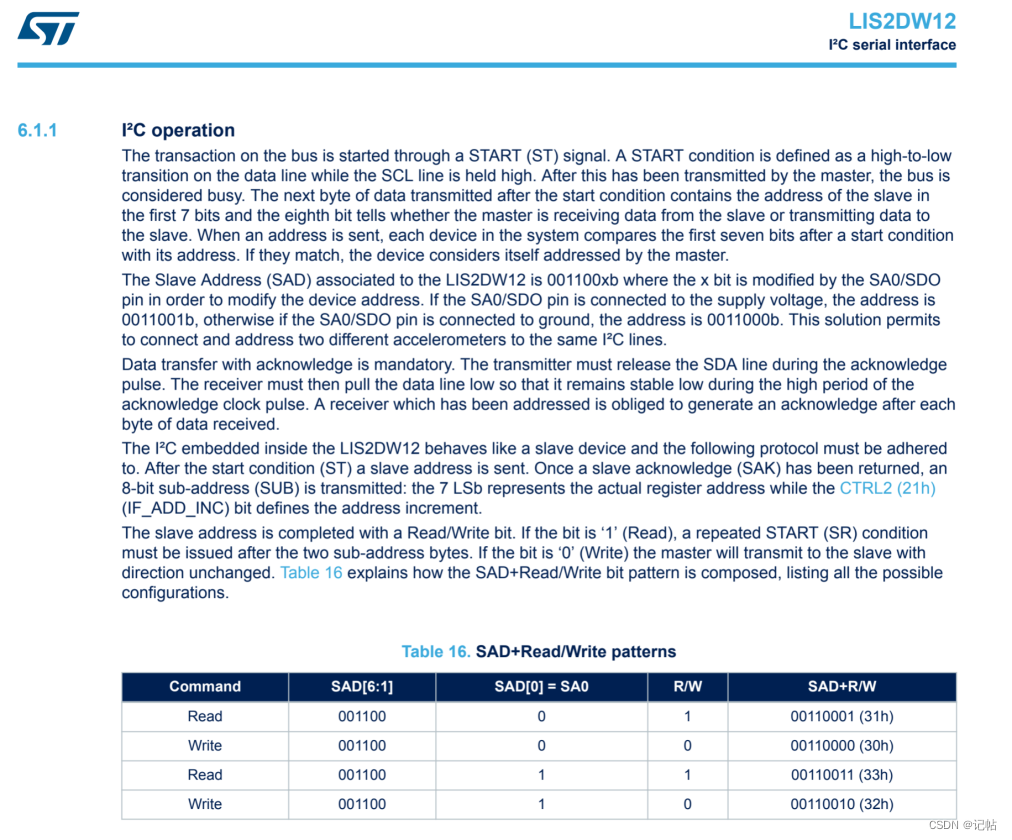
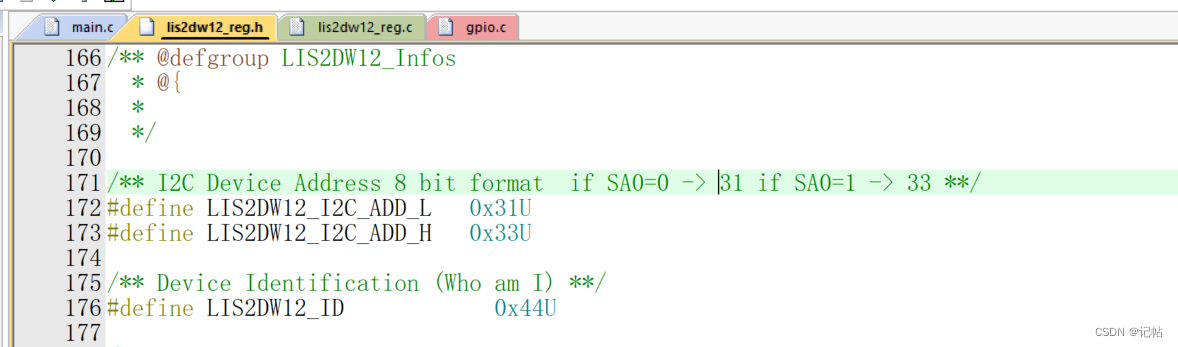
在使用IIC通訊模式的時(shí)候,SA0是用來(lái)控制IIC的地址位的。
對(duì)于IIC的地址,可以通過(guò)SDO/SA0引腳修改。SDO/SA0引腳可以用來(lái)修改設(shè)備地址的最低有效位。如果SDO/SA0引腳連接到電源電壓,LSb(最低有效位)為'1'(地址0011001b);否則,如果SDO/SA0引腳連接到地線,LSb的值為'0'(地址0011000b)。
對(duì)應(yīng)的IIC接口如下所示。 主要使用的管腳為CS、SCL、SDA、SA0。
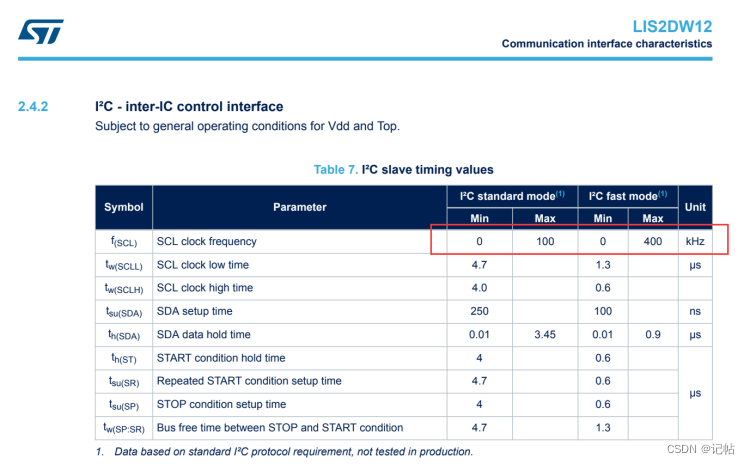
速率
該模塊支持的速度為普通模式(100k)和快速模式(400k)。
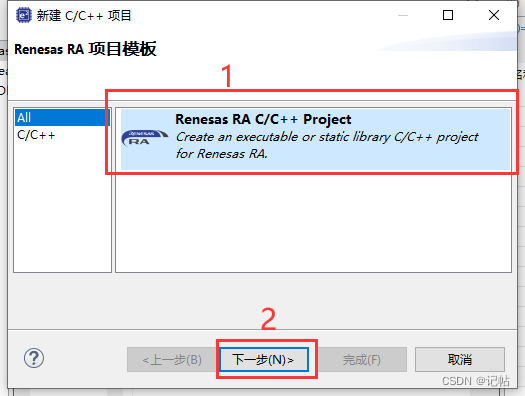
新建工程

工程模板
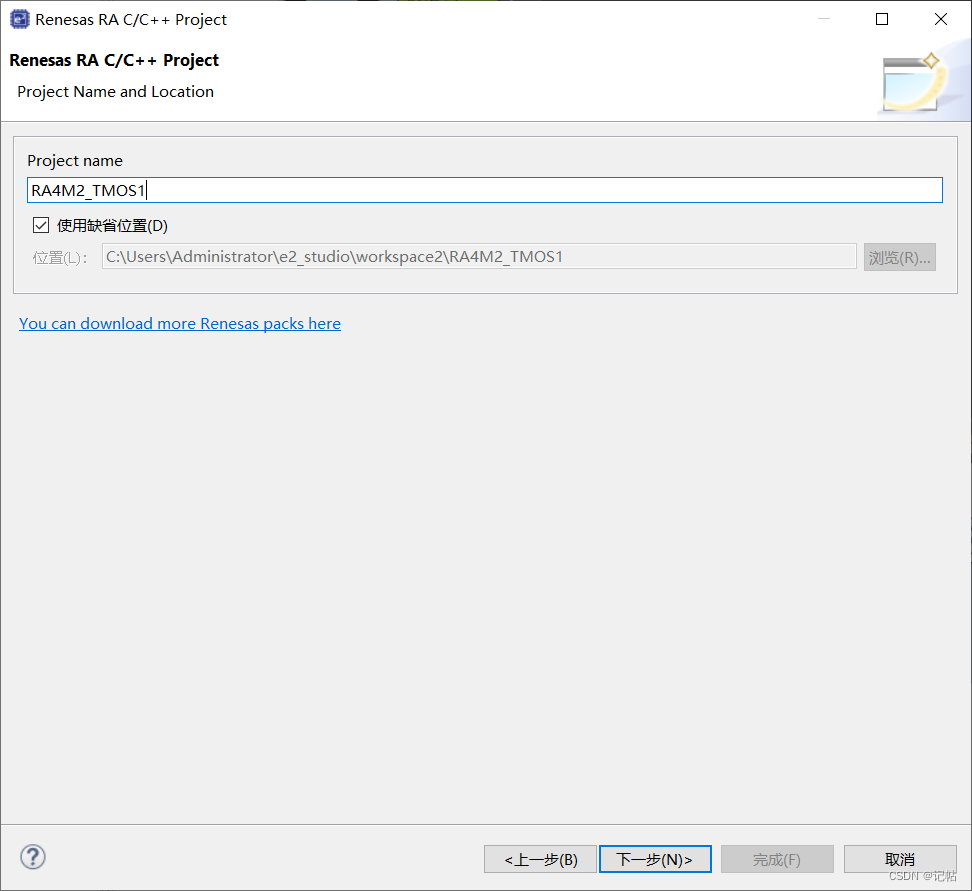
保存工程路徑
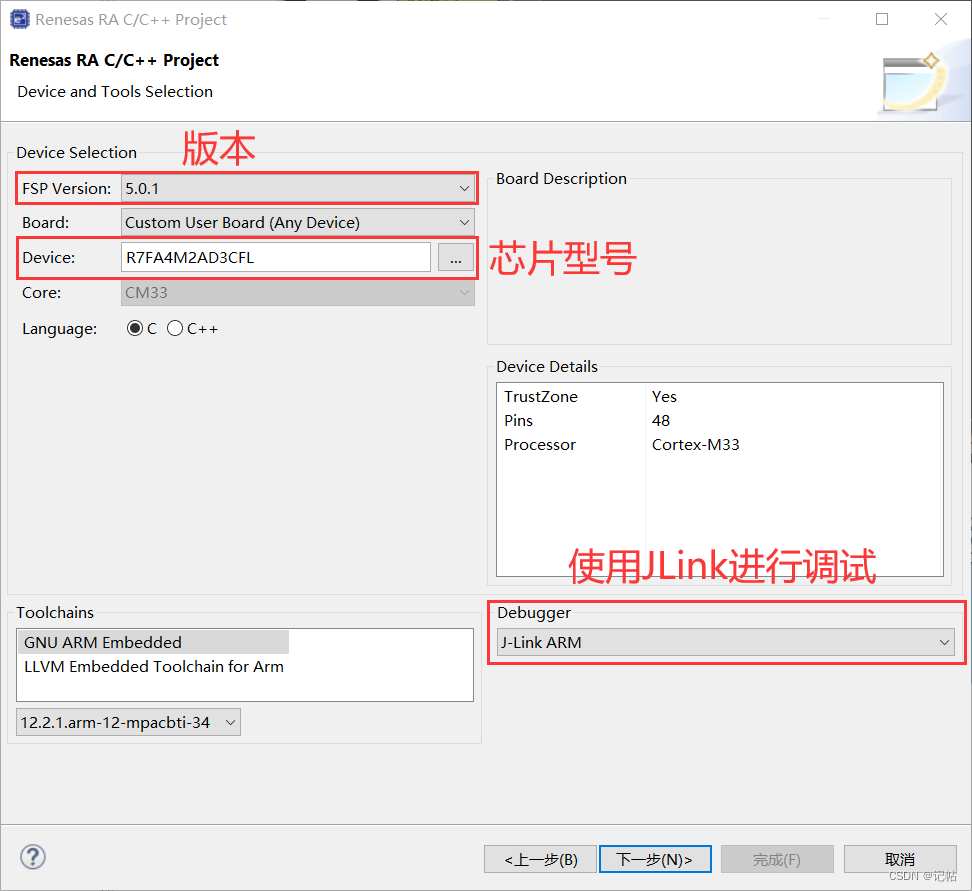
芯片配置
本文中使用R7FA4M2AD3CFL來(lái)進(jìn)行演示。
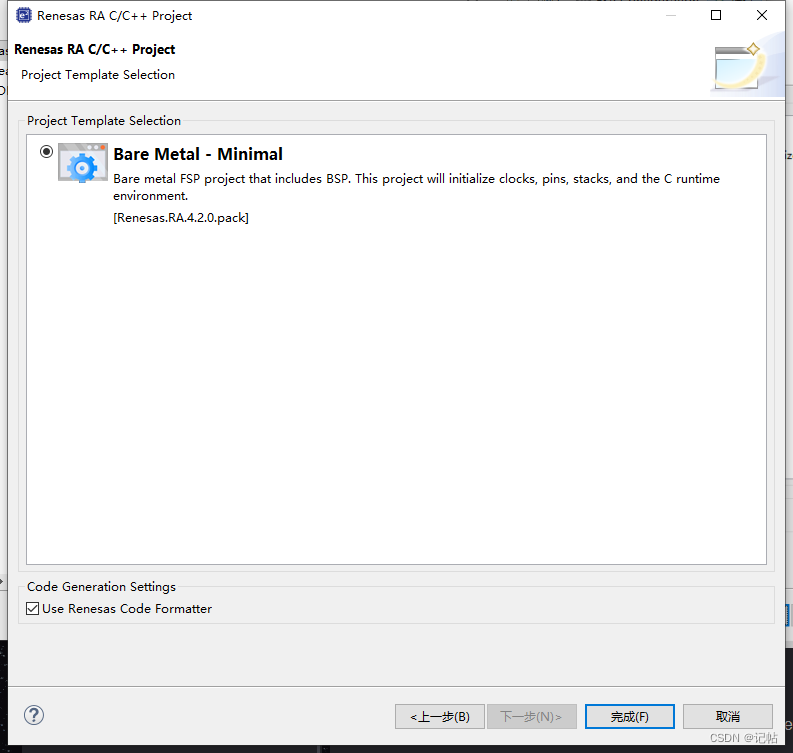
工程模板選擇
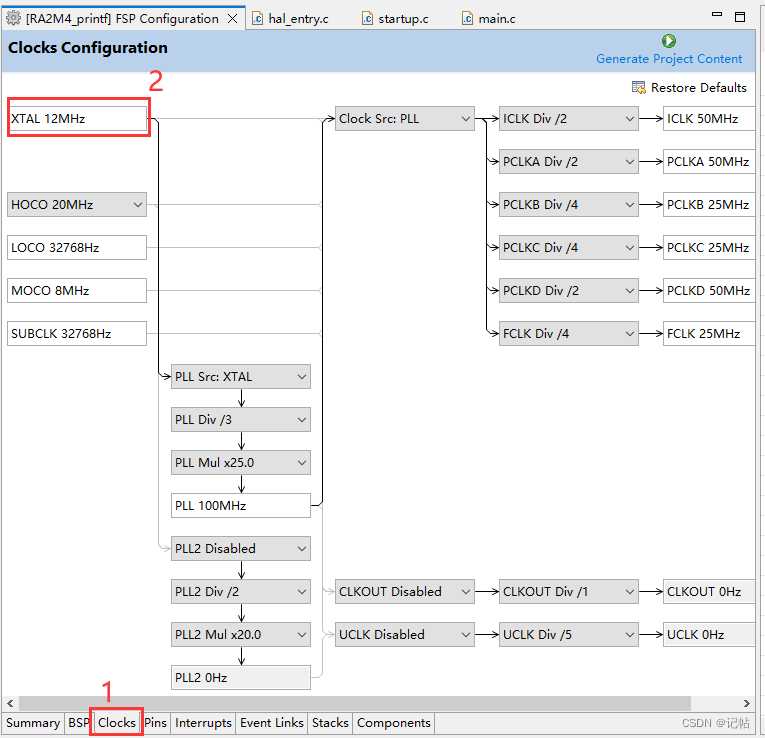
時(shí)鐘設(shè)置
開發(fā)板上的外部高速晶振為12M.
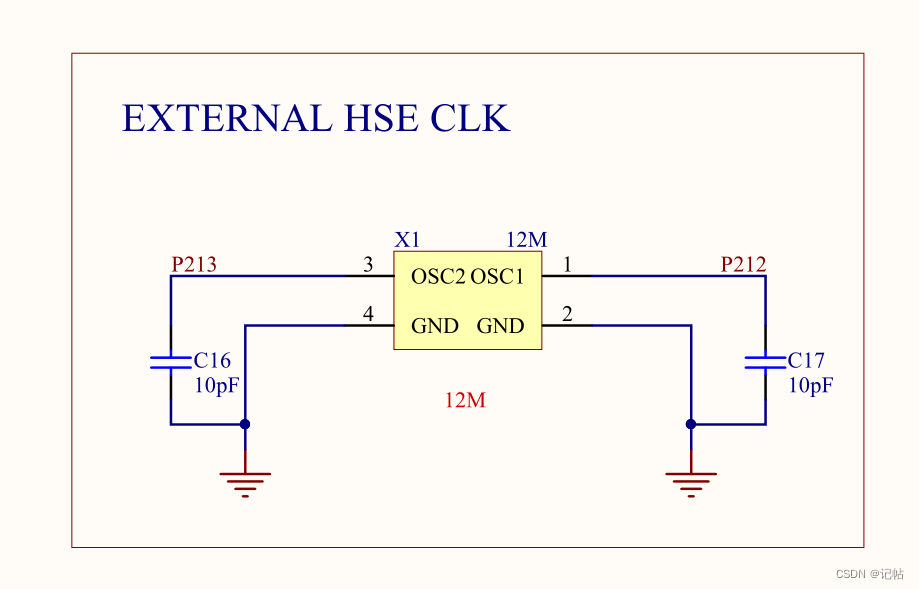
需要修改XTAL為12M。
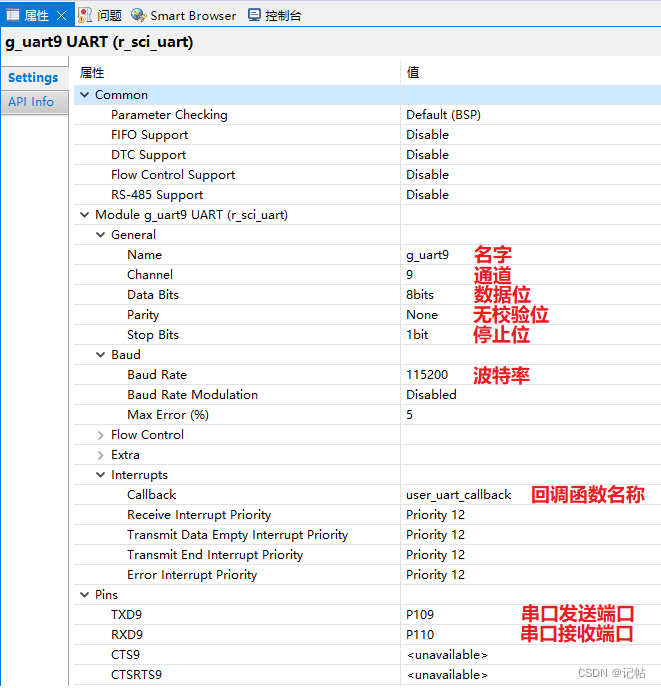
UART配置
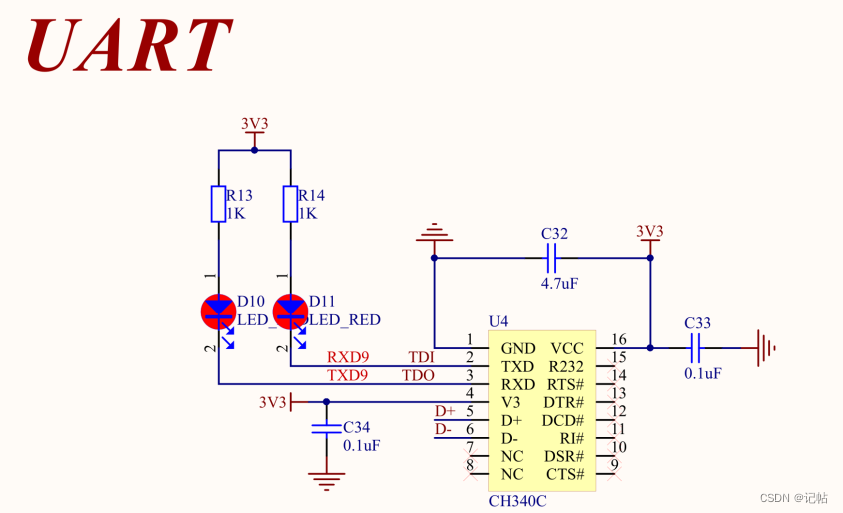
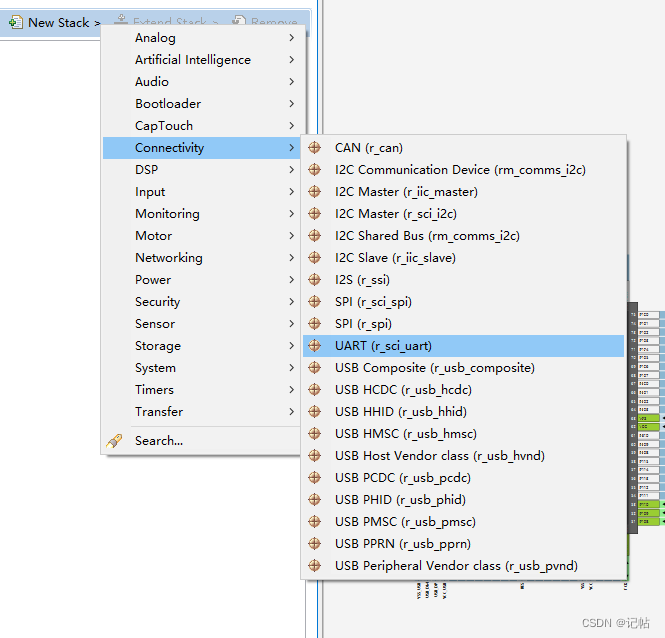
點(diǎn)擊Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
UART屬性配置
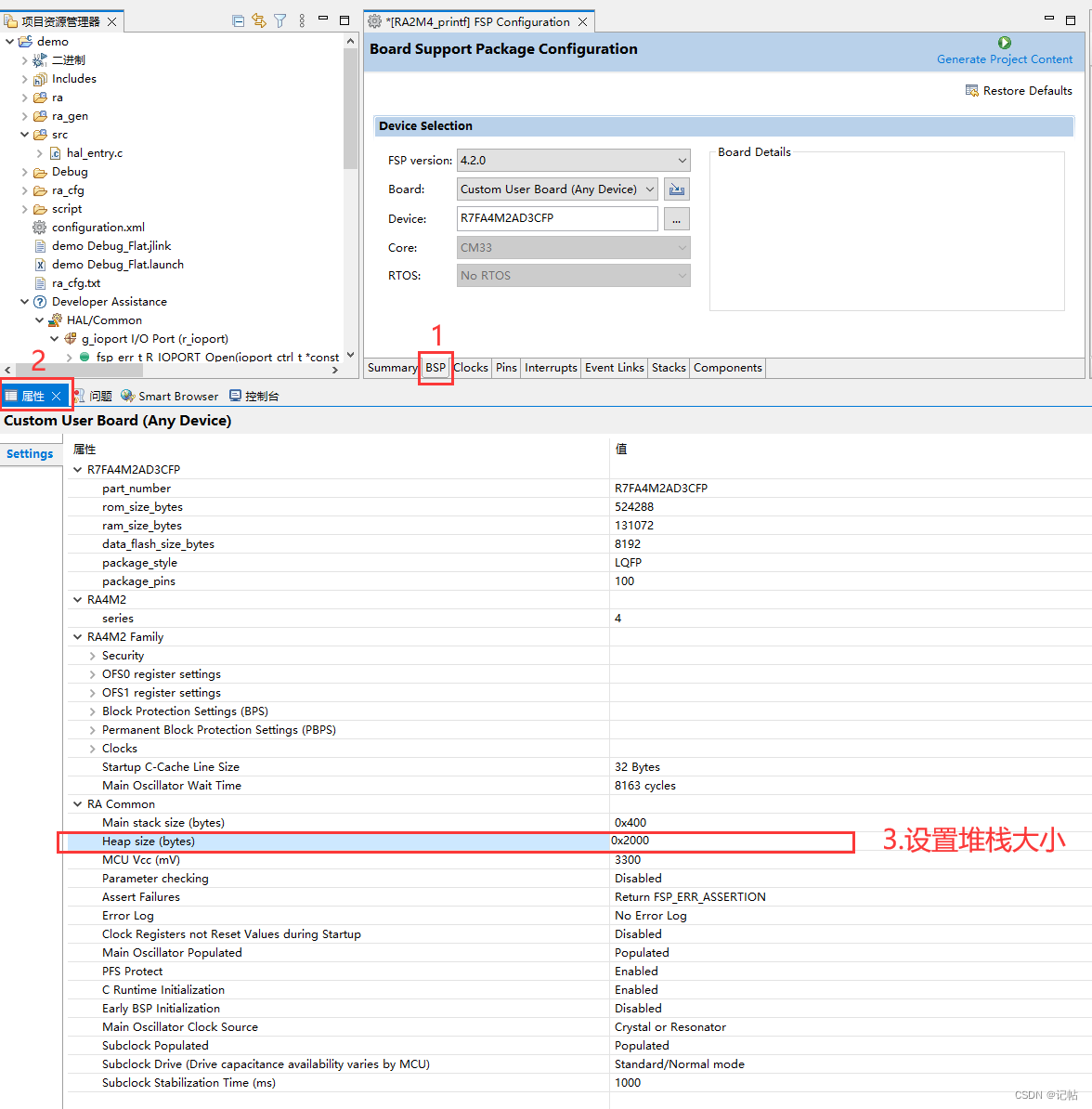
設(shè)置e2studio堆棧
printf函數(shù)通常需要設(shè)置堆棧大小。這是因?yàn)閜rintf函數(shù)在運(yùn)行時(shí)需要使用棧空間來(lái)存儲(chǔ)臨時(shí)變量和函數(shù)調(diào)用信息。如果堆棧大小不足,可能會(huì)導(dǎo)致程序崩潰或不可預(yù)期的行為。
printf函數(shù)使用了可變參數(shù)列表,它會(huì)在調(diào)用時(shí)使用棧來(lái)存儲(chǔ)參數(shù),在函數(shù)調(diào)用結(jié)束時(shí)再清除參數(shù),這需要足夠的棧空間。另外printf也會(huì)使用一些臨時(shí)變量,如果棧空間不足,會(huì)導(dǎo)致程序崩潰。
因此,為了避免這類問題,應(yīng)該根據(jù)程序的需求來(lái)合理設(shè)置堆棧大小。
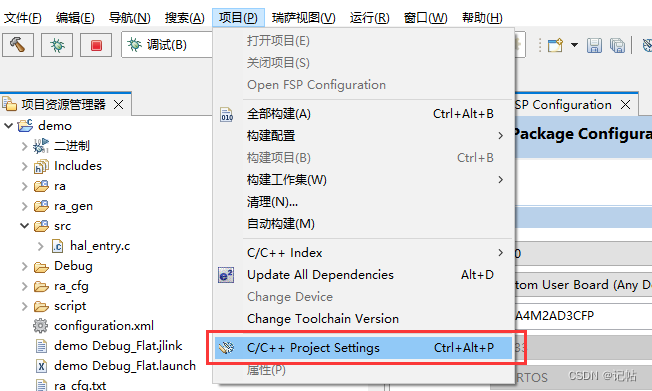
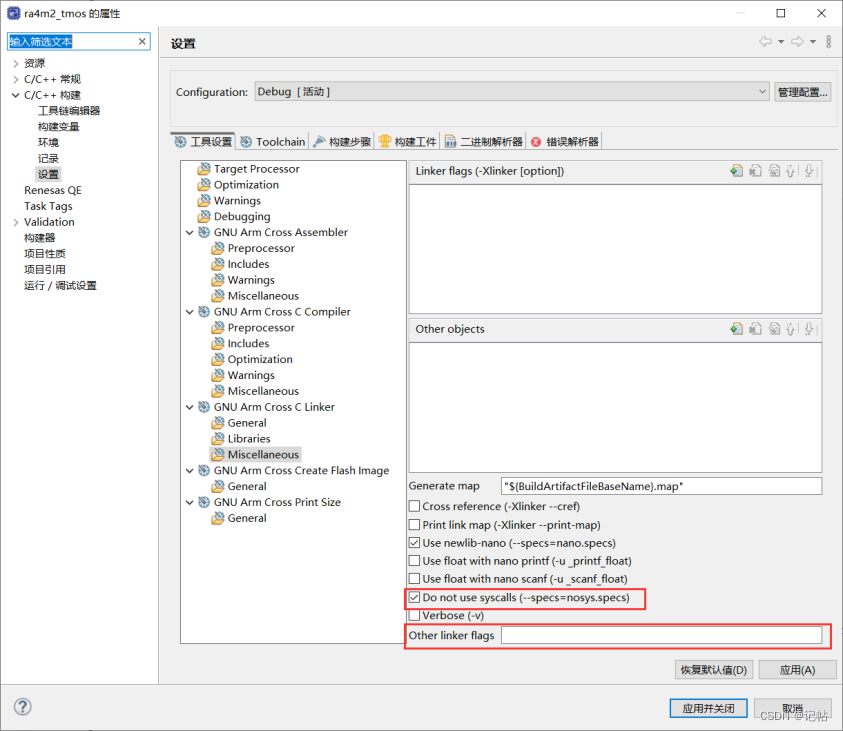
e2studio的重定向printf設(shè)置
在嵌入式系統(tǒng)的開發(fā)中,尤其是在使用GNU編譯器集合(GCC)時(shí),–specs 參數(shù)用于指定鏈接時(shí)使用的系統(tǒng)規(guī)格(specs)文件。這些規(guī)格文件控制了編譯器和鏈接器的行為,尤其是關(guān)于系統(tǒng)庫(kù)和啟動(dòng)代碼的鏈接。–specs=rdimon.specs 和 --specs=nosys.specs 是兩種常見的規(guī)格文件,它們用于不同的場(chǎng)景。
–specs=rdimon.specs
用途: 這個(gè)選項(xiàng)用于鏈接“Redlib”庫(kù),這是為裸機(jī)(bare-metal)和半主機(jī)(semihosting)環(huán)境設(shè)計(jì)的C庫(kù)的一個(gè)變體。半主機(jī)環(huán)境是一種特殊的運(yùn)行模式,允許嵌入式程序通過(guò)宿主機(jī)(如開發(fā)PC)的調(diào)試器進(jìn)行輸入輸出操作。
應(yīng)用場(chǎng)景: 當(dāng)你需要在沒有完整操作系統(tǒng)的環(huán)境中運(yùn)行程序,但同時(shí)需要使用調(diào)試器來(lái)處理輸入輸出(例如打印到宿主機(jī)的終端),這個(gè)選項(xiàng)非常有用。
特點(diǎn): 它提供了一些基本的系統(tǒng)調(diào)用,通過(guò)調(diào)試接口與宿主機(jī)通信。
–specs=nosys.specs
用途: 這個(gè)選項(xiàng)鏈接了一個(gè)非常基本的系統(tǒng)庫(kù),這個(gè)庫(kù)不提供任何系統(tǒng)服務(wù)的實(shí)現(xiàn)。
應(yīng)用場(chǎng)景: 適用于完全的裸機(jī)程序,其中程序不執(zhí)行任何操作系統(tǒng)調(diào)用,比如不進(jìn)行文件操作或者系統(tǒng)級(jí)輸入輸出。
特點(diǎn): 這是一個(gè)更“裸”的環(huán)境,沒有任何操作系統(tǒng)支持。使用這個(gè)規(guī)格文件,程序不期望有操作系統(tǒng)層面的任何支持。
如果你的程序需要與宿主機(jī)進(jìn)行交互(如在開發(fā)期間的調(diào)試),并且通過(guò)調(diào)試器進(jìn)行基本的輸入輸出操作,則使用 --specs=rdimon.specs。
如果你的程序是完全獨(dú)立的,不需要任何形式的操作系統(tǒng)服務(wù),包括不進(jìn)行任何系統(tǒng)級(jí)的輸入輸出,則使用 --specs=nosys.specs。
R_SCI_UART_Open()函數(shù)原型
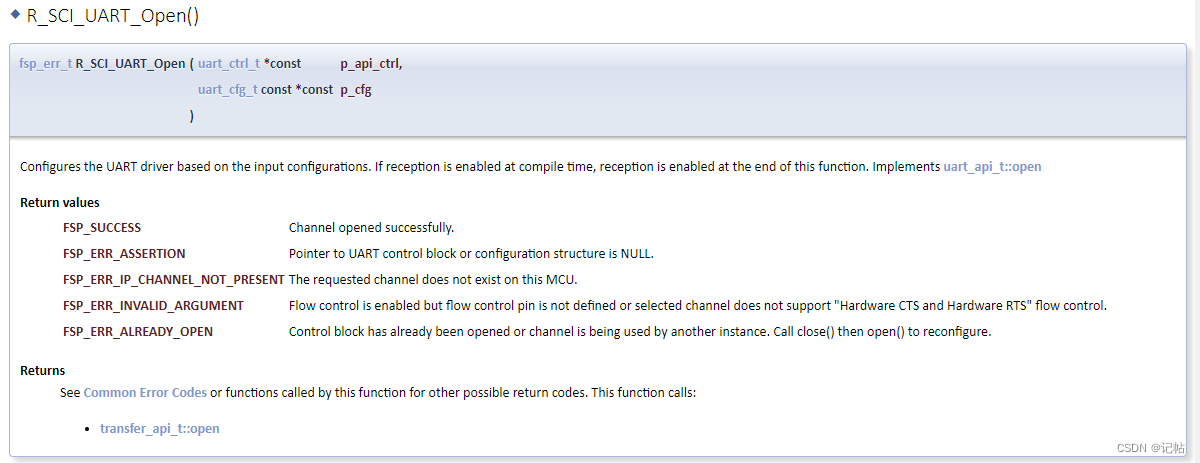
故可以用 R_SCI_UART_Open()函數(shù)進(jìn)行配置,開啟和初始化UART。
/* Open the transfer instance with initial configuration. */ err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg); assert(FSP_SUCCESS == err);
回調(diào)函數(shù)user_uart_callback ()
當(dāng)數(shù)據(jù)發(fā)送的時(shí)候,可以查看UART_EVENT_TX_COMPLETE來(lái)判斷是否發(fā)送完畢。
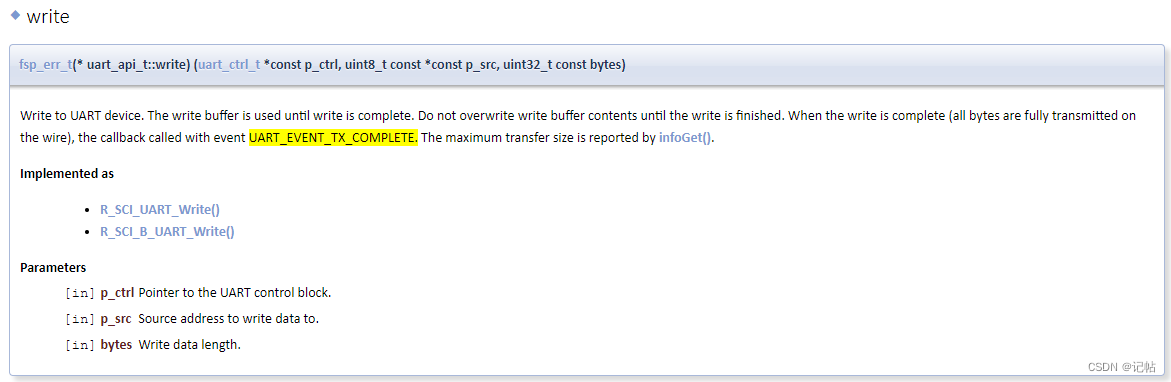
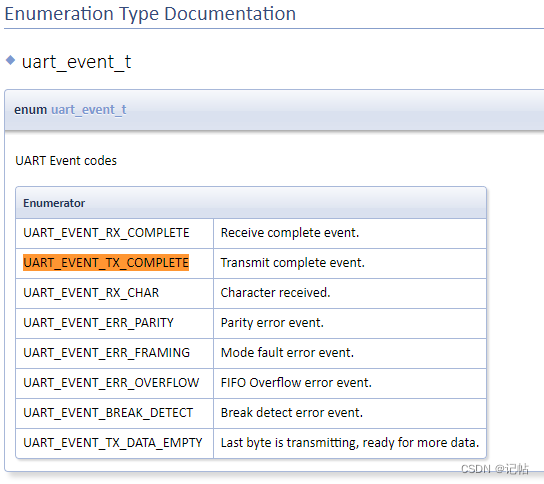
可以檢查檢查 "p_args" 結(jié)構(gòu)體中的 "event" 字段的值是否等于 "UART_EVENT_TX_COMPLETE"。如果條件為真,那么 if 語(yǔ)句后面的代碼塊將會(huì)執(zhí)行。
fsp_err_t err = FSP_SUCCESS; volatile bool uart_send_complete_flag = false; void user_uart_callback (uart_callback_args_t * p_args) { if(p_args- >event == UART_EVENT_TX_COMPLETE) { uart_send_complete_flag = true; } }
printf輸出重定向到串口
打印最常用的方法是printf,所以要解決的問題是將printf的輸出重定向到串口,然后通過(guò)串口將數(shù)據(jù)發(fā)送出去。 注意一定要加上頭文件#include
#ifdef __GNUC__ //串口重定向 #define PUTCHAR_PROTOTYPE int __io_putchar(int ch) #else #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f) #endif PUTCHAR_PROTOTYPE { err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1); if(FSP_SUCCESS != err) __BKPT(); while(uart_send_complete_flag == false){} uart_send_complete_flag = false; return ch; } int _write(int fd,char *pBuffer,int size) { for(int i=0;i< size;i++) { __io_putchar(*pBuffer++); } return size; }
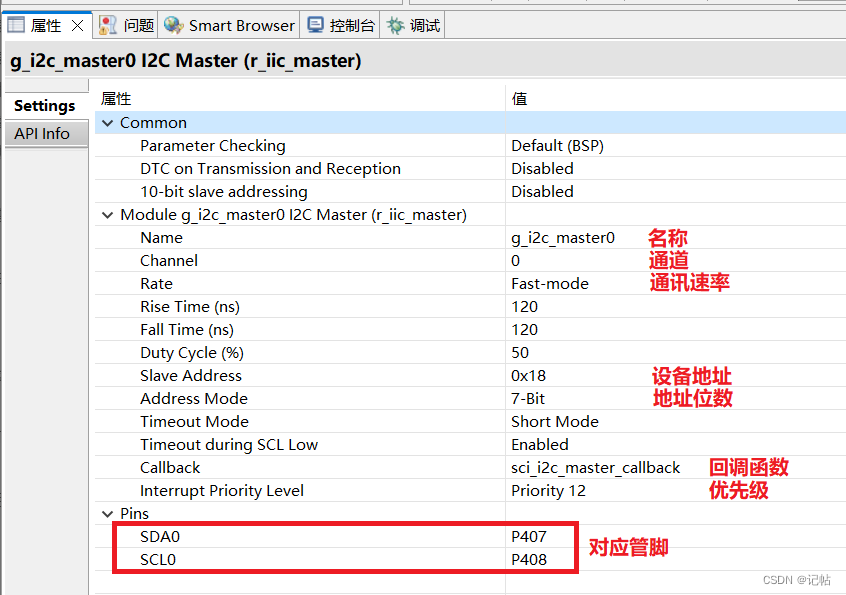
IIC屬性配置
查看手冊(cè),可以得知LIS2DW12的IIC地址為“0011000” 或者 “0011001”,即0x18或0x19。
初始換管腳
由于需要向LIS2DW12_I2C_ADD_L寫入以及為IIC模式。
所以使能CS為高電平,配置為IIC模式。
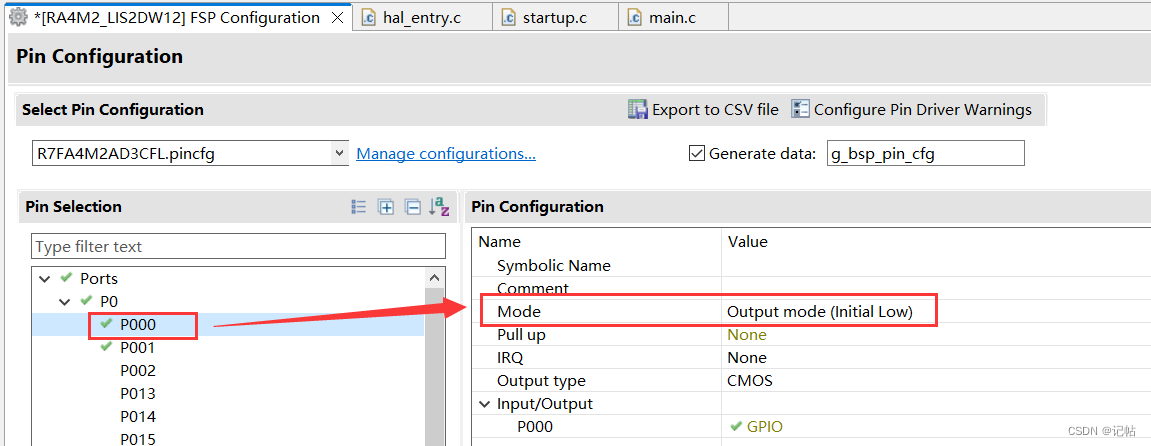
配置SA0為低電平。
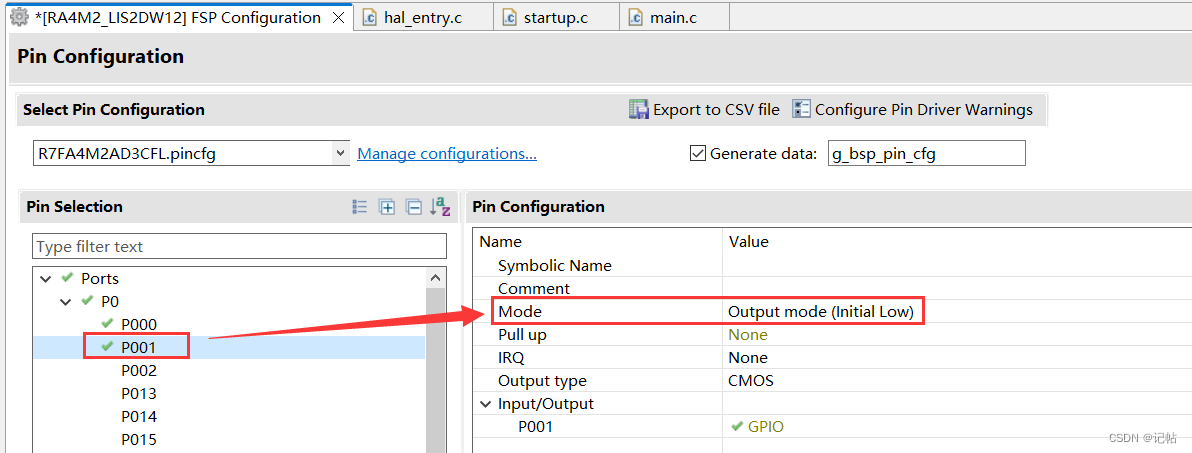
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_00, BSP_IO_LEVEL_HIGH); R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_01, BSP_IO_LEVEL_LOW);
IIC配置
配置RA4M2的I2C接口,使其作為I2C master進(jìn)行通信。 查看開發(fā)板原理圖,對(duì)應(yīng)的IIC為P407和P408。
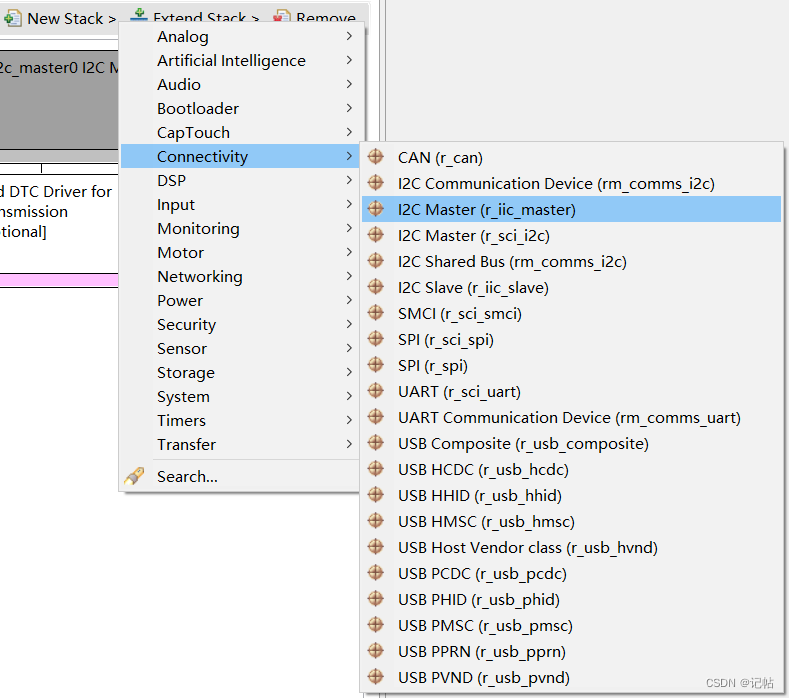
點(diǎn)擊Stacks->New Stack->Connectivity -> I2C Master(r_iic_master)。
設(shè)置IIC的配置,需要注意從機(jī)的地址。
R_IIC_MASTER_Open()函數(shù)原型
R_IIC_MASTER_Open()函數(shù)為執(zhí)行IIC初始化,開啟配置如下所示。
/* Initialize the I2C module */ err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg); /* Handle any errors. This function should be defined by the user. */ assert(FSP_SUCCESS == err);
R_IIC_MASTER_Write()函數(shù)原型
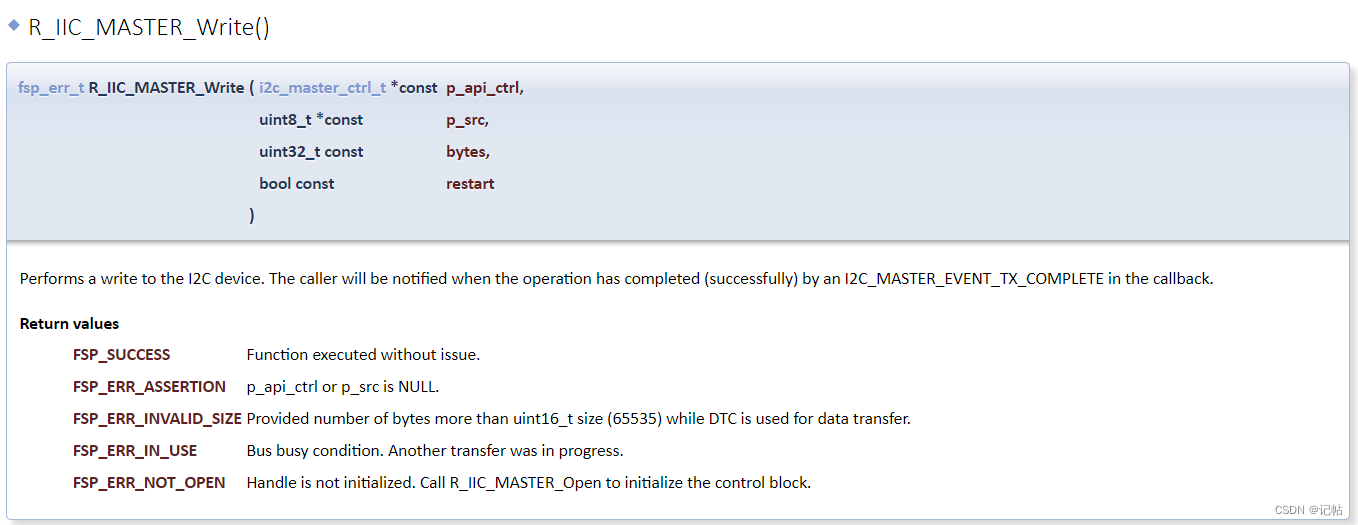
R_IIC_MASTER_Write()函數(shù)是向IIC設(shè)備中寫入數(shù)據(jù),寫入格式如下所示。
err = R_IIC_MASTER_Write(&g_i2c_master0_ctrl, ?, 1, true); assert(FSP_SUCCESS == err);
R_IIC_MASTER_Read()函數(shù)原型
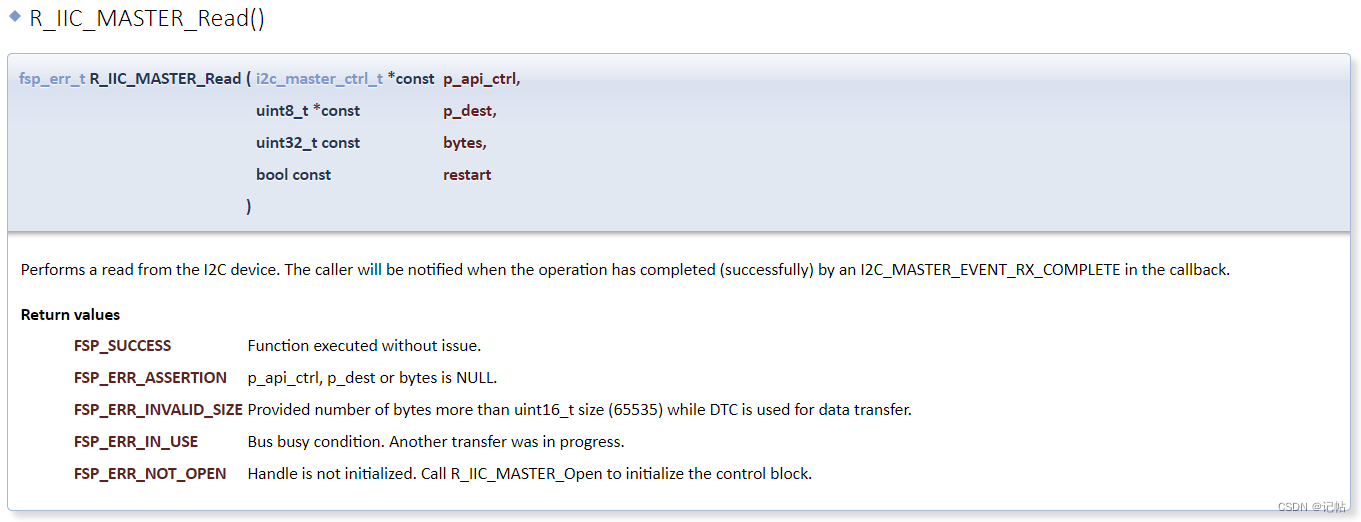
R_SCI_I2C_Read()函數(shù)是向IIC設(shè)備中讀取數(shù)據(jù),讀取格式如下所示。
/* Read data from I2C slave */ err = R_IIC_MASTER_Read(&g_i2c_master0_ctrl, bufp, len, false); assert(FSP_SUCCESS == err);
sci_i2c_master_callback()回調(diào)函數(shù)
對(duì)于數(shù)據(jù)是否發(fā)送完畢,可以查看是否獲取到I2C_MASTER_EVENT_TX_COMPLETE字段。
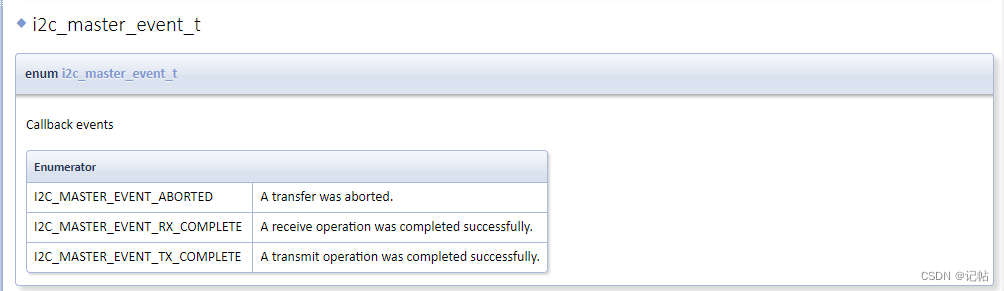
/* Callback function */ i2c_master_event_t i2c_event = I2C_MASTER_EVENT_ABORTED; uint32_t timeout_ms = 100000; void sci_i2c_master_callback(i2c_master_callback_args_t *p_args) { i2c_event = I2C_MASTER_EVENT_ABORTED; if (NULL != p_args) { /* capture callback event for validating the i2c transfer event*/ i2c_event = p_args- >event; } }
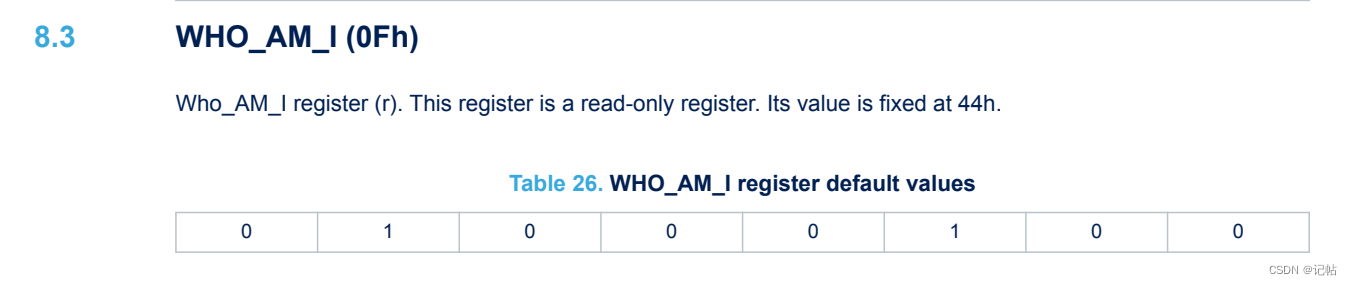
獲取ID
我們可以向WHO_AM_I (0Fh)獲取固定值,判斷是否為0x44。
lis2dw12_device_id_get為獲取函數(shù)。
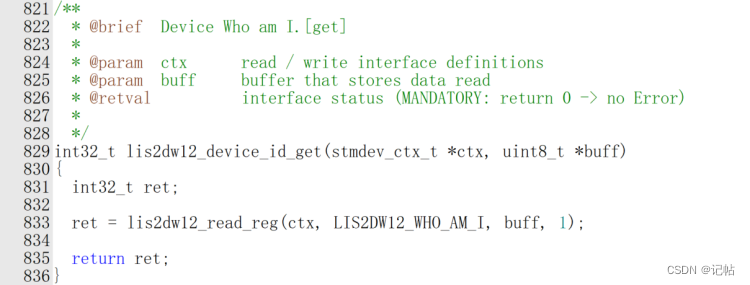
對(duì)應(yīng)的獲取ID驅(qū)動(dòng)程序,如下所示。
/* Initialize mems driver interface */ stmdev_ctx_t dev_ctx; dev_ctx.write_reg = platform_write; dev_ctx.read_reg = platform_read; dev_ctx.handle = &SENSOR_BUS; /* Wait sensor boot time */ platform_delay(BOOT_TIME); /* Check device ID */ lis2dw12_device_id_get(&dev_ctx, &whoamI); printf("LIS2DW12_ID=0x%x,whoamI=0x%xn",LIS2DW12_ID,whoamI); if (whoamI != LIS2DW12_ID) while (1) { /* manage here device not found */ }
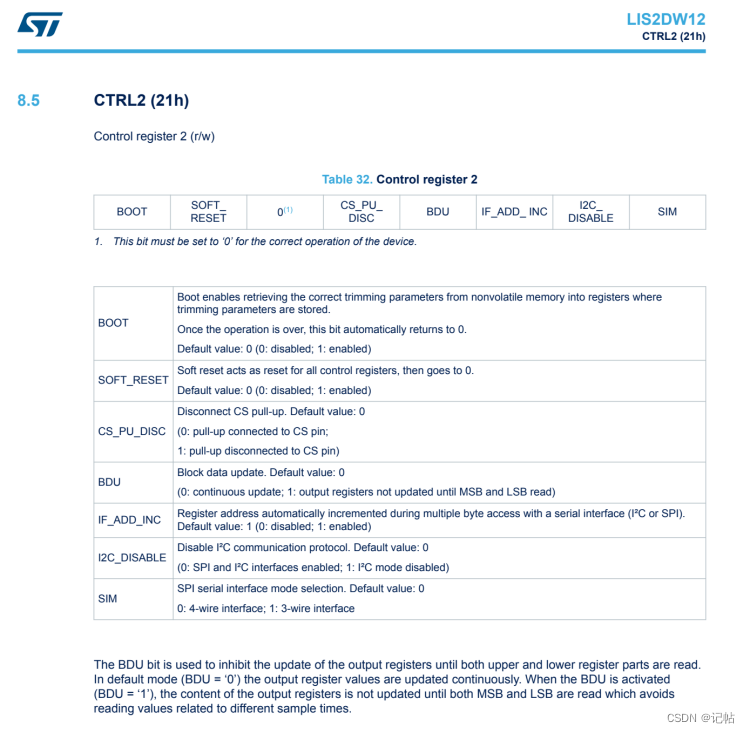
復(fù)位操作
可以向CTRL2 (21h)的SOFT_RESET寄存器寫入1進(jìn)行復(fù)位。
lis2dw12_reset_set為重置函數(shù)。
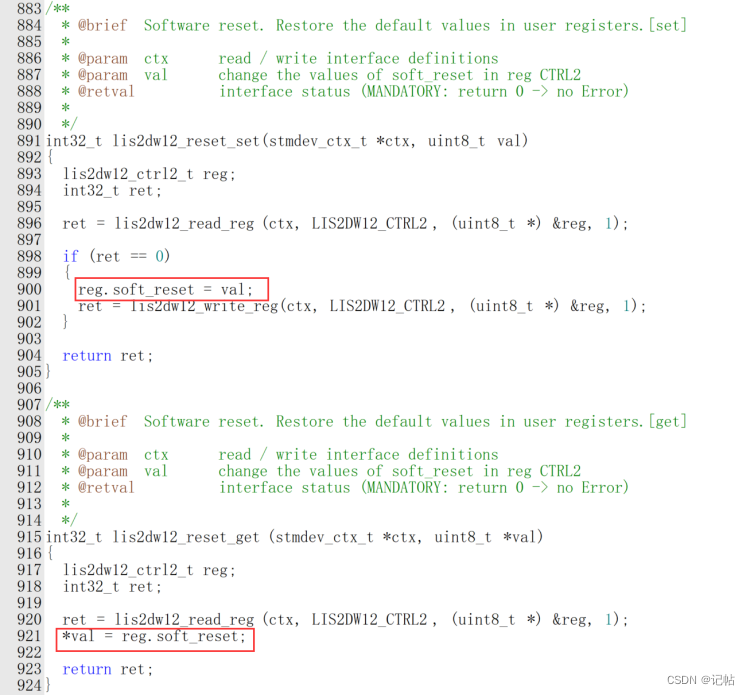
對(duì)應(yīng)的驅(qū)動(dòng)程序,如下所示。
/* Restore default configuration */ lis2dw12_reset_set(&dev_ctx, PROPERTY_ENABLE); do { lis2dw12_reset_get(&dev_ctx, &rst); } while (rst);
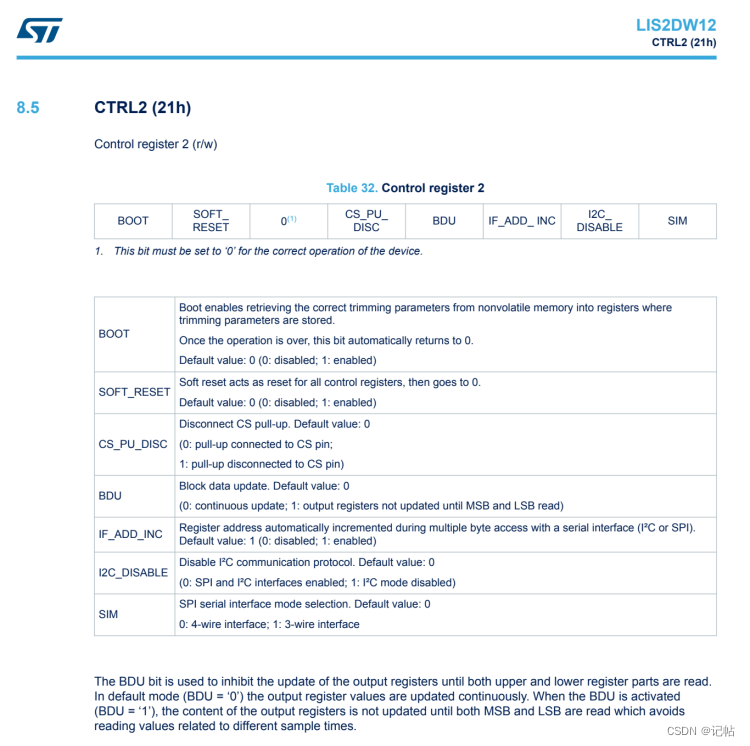
BDU設(shè)置
在很多傳感器中,數(shù)據(jù)通常被存儲(chǔ)在輸出寄存器中,這些寄存器分為兩部分:MSB和LSB。這兩部分共同表示一個(gè)完整的數(shù)據(jù)值。例如,在一個(gè)加速度計(jì)中,MSB和LSB可能共同表示一個(gè)加速度的測(cè)量值。
連續(xù)更新模式(BDU = ‘0’):在默認(rèn)模式下,輸出寄存器的值會(huì)持續(xù)不斷地被更新。這意味著在你讀取MSB和LSB的時(shí)候,寄存器中的數(shù)據(jù)可能會(huì)因?yàn)樾碌臏y(cè)量數(shù)據(jù)而更新。這可能導(dǎo)致一個(gè)問題:當(dāng)你讀取MSB時(shí),如果寄存器更新了,接下來(lái)讀取的LSB可能就是新的測(cè)量值的一部分,而不是與MSB相對(duì)應(yīng)的值。這樣,你得到的就是一個(gè)“拼湊”的數(shù)據(jù),它可能無(wú)法準(zhǔn)確代表任何實(shí)際的測(cè)量時(shí)刻。
塊數(shù)據(jù)更新(BDU)模式(BDU = ‘1’):當(dāng)激活BDU功能時(shí),輸出寄存器中的內(nèi)容不會(huì)在讀取MSB和LSB之間更新。這就意味著一旦開始讀取數(shù)據(jù)(無(wú)論是先讀MSB還是LSB),寄存器中的那一組數(shù)據(jù)就被“鎖定”,直到兩部分都被讀取完畢。這樣可以確保你讀取的MSB和LSB是同一測(cè)量時(shí)刻的數(shù)據(jù),避免了讀取到代表不同采樣時(shí)刻的數(shù)據(jù)。
簡(jiǎn)而言之,BDU位的作用是確保在讀取數(shù)據(jù)時(shí),輸出寄存器的內(nèi)容保持穩(wěn)定,從而避免讀取到拼湊或錯(cuò)誤的數(shù)據(jù)。這對(duì)于需要高精度和穩(wěn)定性的應(yīng)用尤為重要。
可以向CTRL2 (21h)的BDU寄存器寫入1進(jìn)行開啟。
對(duì)應(yīng)的驅(qū)動(dòng)程序,如下所示。
/* Enable Block Data Update */ lis2dw12_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
設(shè)置傳感器的量程
FS[1:0] - 全量程選擇:這兩個(gè)位用于設(shè)置傳感器的量程。量程決定了傳感器可以測(cè)量的最大加速度值。例如,量程可以設(shè)置為±2g、±4g、±8g或±16g。這允許用戶根據(jù)應(yīng)用的特定需求調(diào)整傳感器的靈敏度。
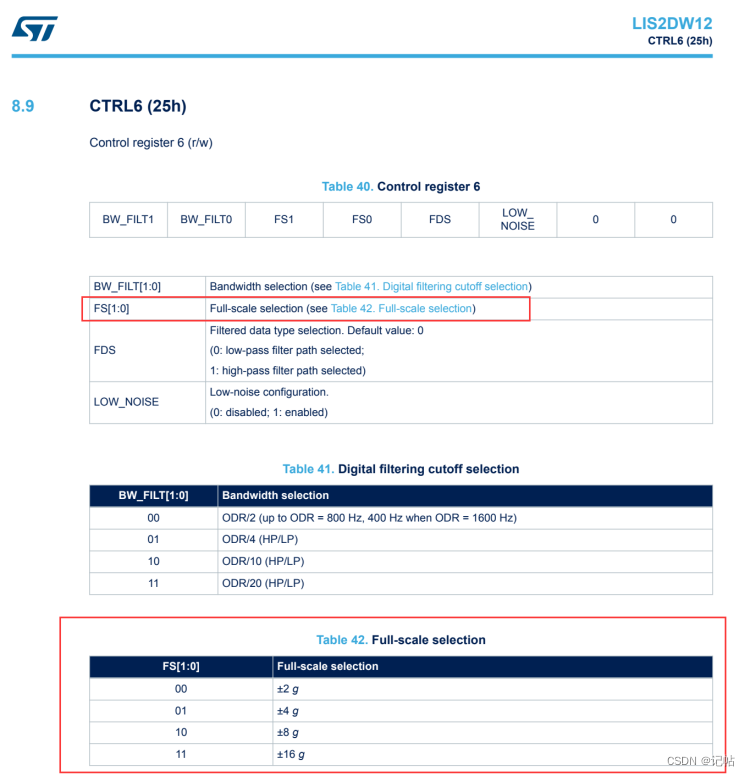
對(duì)應(yīng)的驅(qū)動(dòng)程序,如下所示。
/* Set full scale */ lis2dw12_full_scale_set(&dev_ctx, LIS2DW12_2g);
配置過(guò)濾器鏈
lis2dw12_filter_path_set(&dev_ctx, LIS2DW12_LPF_ON_OUT);:設(shè)置加速度計(jì)輸出的過(guò)濾器路徑。這里選擇了輸出上的低通濾波器(LPF),用于去除高頻噪聲。 lis2dw12_filter_bandwidth_set(&dev_ctx, LIS2DW12_ODR_DIV_4);:設(shè)置過(guò)濾器的帶寬。這里的設(shè)置是將輸出數(shù)據(jù)率(ODR)除以4,進(jìn)一步?jīng)Q定了濾波器的截止頻率。
配置電源模式
lis2dw12_power_mode_set(&dev_ctx, LIS2DW12_HIGH_PERFORMANCE);:這個(gè)調(diào)用設(shè)置加速度計(jì)的電源模式為高性能模式。這通常意味著更高的功耗,但提供更精確的測(cè)量。
設(shè)置輸出數(shù)據(jù)速率
lis2dw12_data_rate_set(&dev_ctx, LIS2DW12_XL_ODR_25Hz);:設(shè)置加速度計(jì)的輸出數(shù)據(jù)速率為每秒25次。輸出數(shù)據(jù)速率決定了傳感器多久采集一次數(shù)據(jù),并影響數(shù)據(jù)的實(shí)時(shí)性和功耗。
/* Enable Block Data Update */ lis2dw12_block_data_update_set(&dev_ctx, PROPERTY_ENABLE); /* Set full scale */ lis2dw12_full_scale_set(&dev_ctx, LIS2DW12_2g); /* Configure filtering chain * Accelerometer - filter path / bandwidth */ lis2dw12_filter_path_set(&dev_ctx, LIS2DW12_LPF_ON_OUT); lis2dw12_filter_bandwidth_set(&dev_ctx, LIS2DW12_ODR_DIV_4); /* Configure power mode */ lis2dw12_power_mode_set(&dev_ctx, LIS2DW12_HIGH_PERFORMANCE); /* Set Output Data Rate */ lis2dw12_data_rate_set(&dev_ctx, LIS2DW12_XL_ODR_25Hz);
輪詢獲取加速度
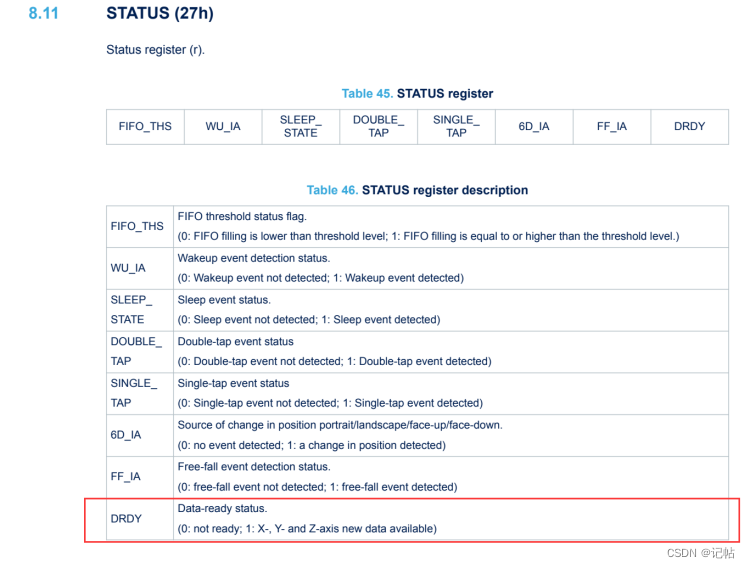
檢查新數(shù)據(jù)是否可用: lis2dw12_flag_data_ready_get(&dev_ctx, ?);:這個(gè)函數(shù)調(diào)用檢查加速度計(jì)是否有新的數(shù)據(jù)可讀。如果有新數(shù)據(jù),reg 變量將被設(shè)置為非零值。 主要為讀取STATUS (27h)的DRDY位。
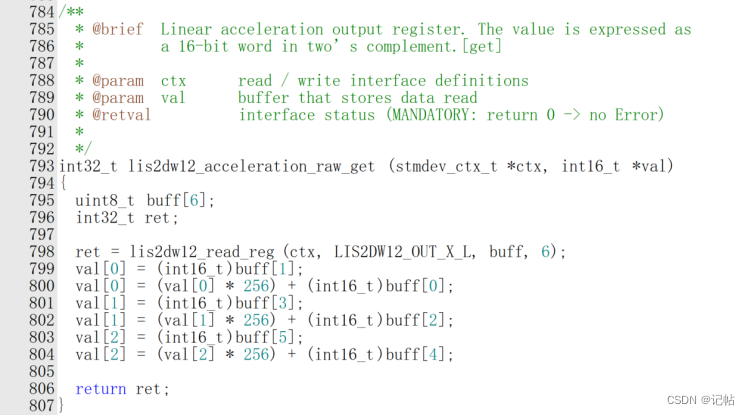
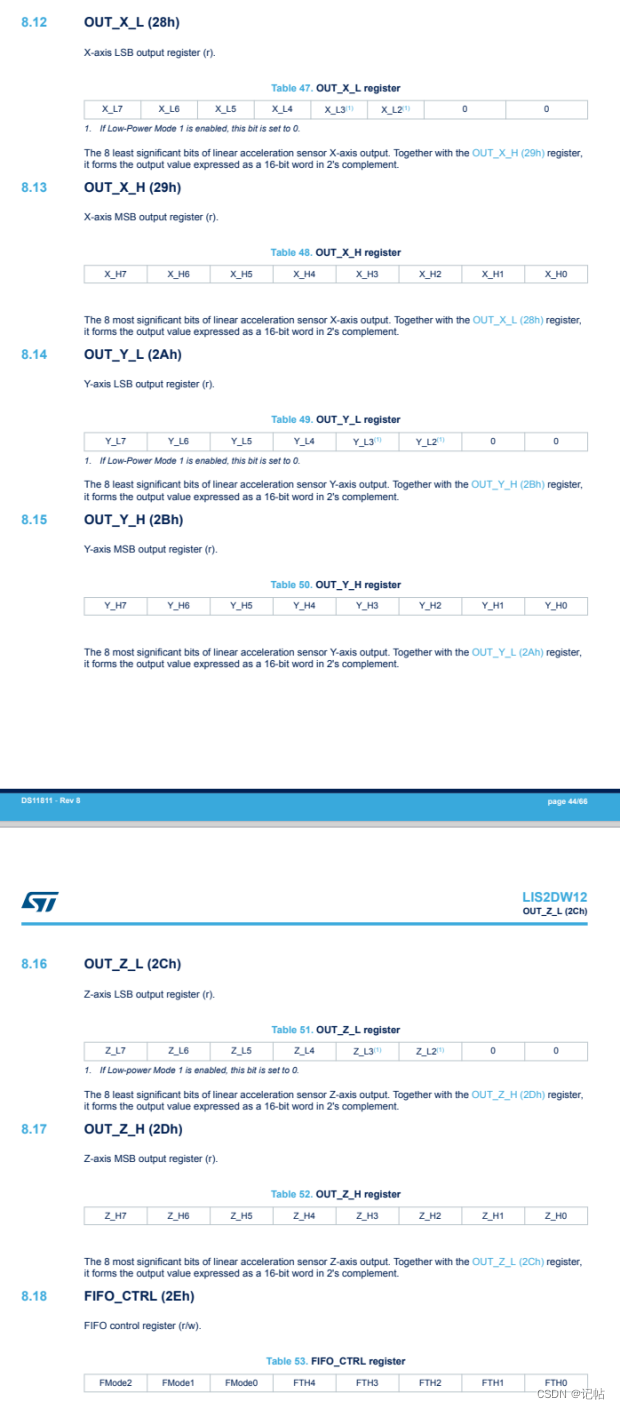
如果 reg 是非零的,說(shuō)明有新的加速度數(shù)據(jù)可讀。 lis2dw12_acceleration_raw_get(&dev_ctx, data_raw_acceleration);:這個(gè)函數(shù)調(diào)用實(shí)際讀取加速度計(jì)的原始數(shù)據(jù),并存儲(chǔ)在 data_raw_acceleration 數(shù)組中。 數(shù)據(jù)在28h-2Dh中。
加速度數(shù)據(jù)首先以原始格式(通常是整數(shù))讀取,然后需要轉(zhuǎn)換為更有意義的單位,如毫重力(mg)。這里的轉(zhuǎn)換函數(shù) lis2dw12_from_fs2_to_mg() 根據(jù)加速度計(jì)的量程(這里假設(shè)為±2g)將原始數(shù)據(jù)轉(zhuǎn)換為毫重力單位。 acceleration_mg[0] = lis2dw12_from_fs2_to_mg(data_raw_acceleration[0]); 等三行代碼分別轉(zhuǎn)換 X、Y、Z 軸的加速度數(shù)據(jù)。

● LIS2DW12 加速度計(jì)通常會(huì)有一個(gè)固定的位分辨率,比如 16 位(即輸出值是一個(gè) 16 位的整數(shù))。這意味著加速度計(jì)可以輸出的不同值的總數(shù)是 2^16=65536。這些值均勻地分布在 -2g 到 +2g 的范圍內(nèi)。
● 因此,這個(gè)范圍(4g 或者 4000 mg)被分成了 65536 個(gè)步長(zhǎng)。
● 每個(gè)步長(zhǎng)的大小是 4000 mg/65536≈0.061 mg/LSB
所以,函數(shù)中的乘法 ((float_t)lsb) * 0.061f 是將原始的整數(shù)值轉(zhuǎn)換為以毫重力(mg)為單位的加速度值。這個(gè)轉(zhuǎn)換對(duì)于將加速度計(jì)的原始讀數(shù)轉(zhuǎn)換為實(shí)際的物理測(cè)量值是必需的。
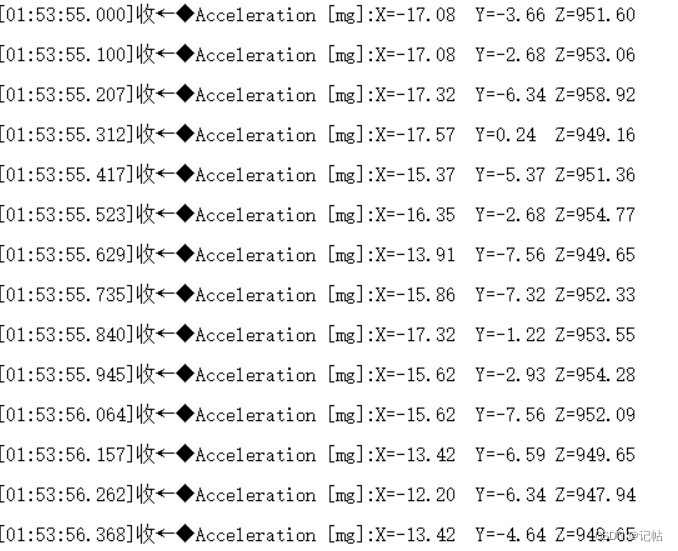
while (1) { uint8_t reg; /* Read output only if new value is available */ lis2dw12_flag_data_ready_get(&dev_ctx, ?); if (reg) { /* Read acceleration data */ memset(data_raw_acceleration, 0x00, 3 * sizeof(int16_t)); lis2dw12_acceleration_raw_get(&dev_ctx, data_raw_acceleration); //acceleration_mg[0] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[0]); //acceleration_mg[1] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[1]); //acceleration_mg[2] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[2]); acceleration_mg[0] = lis2dw12_from_fs2_to_mg( data_raw_acceleration[0]); acceleration_mg[1] = lis2dw12_from_fs2_to_mg( data_raw_acceleration[1]); acceleration_mg[2] = lis2dw12_from_fs2_to_mg( data_raw_acceleration[2]); printf("Acceleration [mg]:X=%4.2ftY=%4.2ftZ=%4.2frn",acceleration_mg[0], acceleration_mg[1], acceleration_mg[2]); } R_BSP_SoftwareDelay(100, BSP_DELAY_UNITS_MILLISECONDS); }
演示
-
嵌入式系統(tǒng)
+關(guān)注
關(guān)注
40文章
3487瀏覽量
128665 -
加速度計(jì)
+關(guān)注
關(guān)注
6文章
689瀏覽量
45658 -
三軸加速度計(jì)
+關(guān)注
關(guān)注
1文章
27瀏覽量
13306 -
Studio
+關(guān)注
關(guān)注
2文章
187瀏覽量
28513
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
三軸加速度計(jì)LIS2DW12開發(fā)(1)----輪詢獲取加速度數(shù)據(jù)
三軸加速度計(jì)LIS2DW12開發(fā)(2)----基于中斷信號(hào)獲取加速度數(shù)據(jù)
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(2)----基于中斷信號(hào)獲取加速度數(shù)據(jù)
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(3)----檢測(cè)活動(dòng)和靜止?fàn)顟B(tài)
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(4)----測(cè)量?jī)A斜度
三軸加速度計(jì)LIS2DUX12開發(fā)(1)----輪詢獲取加速度數(shù)據(jù)
設(shè)計(jì)具有成本效益的加速度計(jì)
LIS2DW12的應(yīng)用筆記
AIS2DW12三軸線性加速度計(jì)應(yīng)用筆記

LIS2DW12 3D數(shù)字加速度計(jì)應(yīng)用筆記
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(1)----輪詢獲取加速度數(shù)據(jù)
三軸加速度計(jì)LIS2DW12開發(fā)(4)----測(cè)量?jī)A斜度
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(2)----基于中斷信號(hào)獲取加速度數(shù)據(jù)

e2studio開發(fā)三軸加速度計(jì)LIS2DW12(3)----檢測(cè)活動(dòng)和靜止?fàn)顟B(tài)
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(4)----測(cè)量?jī)A斜度





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論