 一文分清普通電機、減速電機、步進電機、舵機、伺服電機的區別
一文分清普通電機、減速電機、步進電機、舵機、伺服電機的區別
這里所說的普通電機、步進電機、伺服電機、舵機是指直流微電機,平時我們接觸的也多是直流電機。電動機,別名“馬達”,就是指根據電磁感應定律保持電磁能的變換或傳送的這種電磁感應設備。電機也稱(別名電機),在電源電路連用英文字母“M”(舊規范用“D”)表達。其主要功能是產生驅動扭矩,用作電器或各種機器的動力源。發電機由電路中的字母“G”表示。
普通電機
普通電機是我們平時見得比較多的電機,電動玩具,刮胡刀等里面都有,一般為直流有刷電機。這種電機有轉速過快、扭力過小的特點,一般只有兩個引腳,用電池的正負極接上兩個引腳就會轉起來,然后電池得正負極再相反的接在兩引腳上電機將會反向轉動。
減速電機
減速電機就是普通電機加上了減速箱,這樣便降低了轉速,增加了扭力,使得普通電機有更廣泛的使用空間。
步進電機
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,稱為“步距角”,它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。
舵機
舵機主要是由外殼、電路板、無核心馬達、齒輪與位置檢測器所構成。其工作原理是由接收機發出訊號給舵機,經由電路板上的IC判斷轉動方向,再驅動無核心馬達開始轉動,透過減速齒輪將動力傳至擺臂,同時由位置檢測器送回訊號,判斷是否已經到達定位。位置檢測器其實就是可變電阻,當舵機轉動時電阻值也會隨之改變,藉由檢測電阻值便可知轉動的角度。
舵機廠商提供的規格資料,通常都會包含外形尺寸(mm)、扭力(kg/cm)、速度(秒/60°)、測試電壓(V)及重量(g)等基本資料。扭力的單位是kg/cm,意思是在擺臂長度1公分處,能吊起幾公斤重的物體。這就是力臂的觀念,因此擺臂長度愈長,則扭力愈小。速度的單位是sec/60°,意思是舵機轉動60°所需要的時間。
伺服電機
伺服電機又稱執行電動機,在自動控制系統中,用作執行元件,把所收到的電信號轉換成電動機軸上的角位移或角速度輸出。分為直流和交流伺服電動機兩大類,其主要特點是,當信號電壓為零時無自轉現象,轉速隨著轉矩的增加而勻速下降。
伺服電機主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉1個脈沖對應的角度,從而實現位移,因為,伺服電機本身具備發出脈沖的功能,所以伺服電機每旋轉一個角度,都會發出對應數量的脈沖,這樣,和伺服電機接受的脈沖形成了呼應,或者叫閉環,如此一來,系統就會知道發了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉動,從而實現精確的定位,可以達到0.001mm。
伺服電機分為交流伺服和直流伺服兩大類。
交流伺服電機分為異步型交流伺服電動機、同步型交流伺服電動機兩類。
直流伺服電機分為有刷和無刷電機。有刷電機成本低,結構簡單,啟動轉矩大,調速范圍寬,控制容易,需要維護,但維護不方便(換碳刷),產生電磁干擾,對環境有要求。因此它可以用于對成本敏感的普通工業和民用場合。
減速電機原理
減速齒輪電機又稱齒輪減速電機或減速電機,是電機驅動閉式傳動齒輪減速裝置,對電機及齒輪箱進行集成組裝的減速傳動機構,用來降低轉速和增大轉矩,以滿足機械設備工作的需要。
減速齒輪電機的用途:①降低轉速。
把電機的轉速通過減速齒輪箱實現所需要的轉速,即常說的輸出轉速。②增大轉矩。
同等功率條件下,輸出轉速越慢的齒輪減速電機,扭力越大,反之越小。③改變傳動方向。
例如我們用兩個扇形齒輪可以將力垂直傳遞到另一個轉動軸。④離合功能。
我們可以通過加裝剎車離合器,實現斷電即時剎車的目的。
步進電機基本原理
工作原理:
通常電機的轉子為永磁體,當電流流過定子繞組時,定子繞組產生一矢量磁場。該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。轉子也隨著該磁場轉一個角度。每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數成正比、轉速與脈沖頻率成正比。改變繞組通電的順序,電機就會反轉。所以可用控制脈沖數量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
發熱原理:
通常見到的各類電機,內部都是有鐵芯和繞組線圈的。繞組有電阻,通電會產生損耗,損耗大小與電阻和電流的平方成正比,這就是我們常說的銅損,如果電流不是標準的直流或正弦波,還會產生諧波損耗;鐵心有磁滯渦流效應,在交變磁場中也會產生損耗,其大小與材料,電流,頻率,電壓有關,這叫鐵損。銅損和鐵損都會以發熱的形式表現出來,從而影響電機的效率。步進電機一般追求定位精度和力矩輸出,效率比較低,電流一般比較大,且諧波成分高,電流交變的頻率也隨轉速而變化,因而步進電機普遍存在發熱情況,且情況比一般交流電機嚴重。
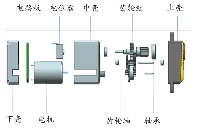
舵機原理
由pwm波進入內部電路產生一個偏置電壓,觸發電機通過減速齒輪帶動電位器移動,使電壓差為零時,電機停轉,從而達到伺服的效果。
舵機PWM的協議都是相同的,但最新出現的舵機可能不一樣
協議一般為:高電平寬度在0.5ms~2.5ms控制舵機轉過不同的角度。
伺服電機工作原理
伺服電機的工作原理比較簡單,但是其工作比較高效。伺服電路內置在電機單元內部,它使用一根通常配有齒輪的柔性軸。電信號控制電機,也決定軸的移動量。伺服電機內部設置簡單:小型直流電機,控制電路和電位器。直流電機通過齒輪連接在控制輪上,當電機轉動時,電位器的電阻發生變化,控制電路能夠精確調節運動和方向。
當軸處于正確的(理想的)位置時,電機停止供電。如果軸沒有停在目標的位置,電動機一直運轉,直到進入正確的方向。目標的位置通過使用電脈沖的信號線傳送。所以,電機的速度與實際和理想的位置成正比。當電機接近所需位置時,電機開始緩慢轉動,但電機轉到最遠時,轉速很快。換句話說,伺服電機只需要盡可能快地完成任務,這使得它們成為高效率的設備。
鴻飛達主推:
霍尼韋爾 測厚儀備件/施耐德愛樂系列伺服驅動器 LXM ,BMX模塊 ,140/TSX 模塊/ABB DCS模塊 ,機器人備件,IGBT模塊 板卡 , ABB張力傳感器/西門子 羅賓康 系列產品,煙氣分析儀 7MB ,電機保護器3UF ,寬溫系列模塊6AG (做項目的客戶 多推薦 走貨期的),軟件 6FC5851 6FC5852 /力士樂 伺服驅動器 電機/發那科 伺服驅動器 電機 /安川 伺服驅動器 電機 .
1.承接PLC控制柜,變頻柜,中低壓開關柜,等自動化集成系統改造、設計、安裝調試;
2.維修:伺服驅動器,PLC模塊,變頻器,觸摸屏,DCS卡件等;
3.KUKA庫卡機器人維保及配件更換。
-
電機
+關注
關注
141文章
8772瀏覽量
143764 -
步進電機
+關注
關注
150文章
3042瀏覽量
146850 -
伺服電機
+關注
關注
85文章
2003瀏覽量
57303 -
舵機
+關注
關注
17文章
255瀏覽量
40775 -
安川電機
+關注
關注
0文章
23瀏覽量
7992
發布評論請先 登錄
相關推薦
普通電機、步進電機、伺服電機、舵機區別






 工商網監
工商網監
評論