 第16章-超聲波跟隨功能 基于STM32的三路超聲波自動跟隨小車 畢業設計 課程設計
第16章-超聲波跟隨功能 基于STM32的三路超聲波自動跟隨小車 畢業設計 課程設計
功能介紹放開頭, 使用便捷無需愁
這是全網最詳細、性價比最高的STM32實戰項目入門教程,通過合理的硬件設計和詳細的視頻筆記介紹,硬件使用STM32F103主控資料多方便學習,通過3萬字筆記、12多個小時視頻、20多章節代碼手把手教會你如何開發和調試。讓你更快掌握嵌入式系統開發。
V3.3.0-STM32智能小車
視頻: https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click
V3:HAL庫開發、功能:PID速度控制、PID循跡、PID跟隨、遙控、避障、PID角度控制、視覺控制、電磁循跡、RTOS等功能。
第16章-超聲波跟隨功能
無PID跟隨功能
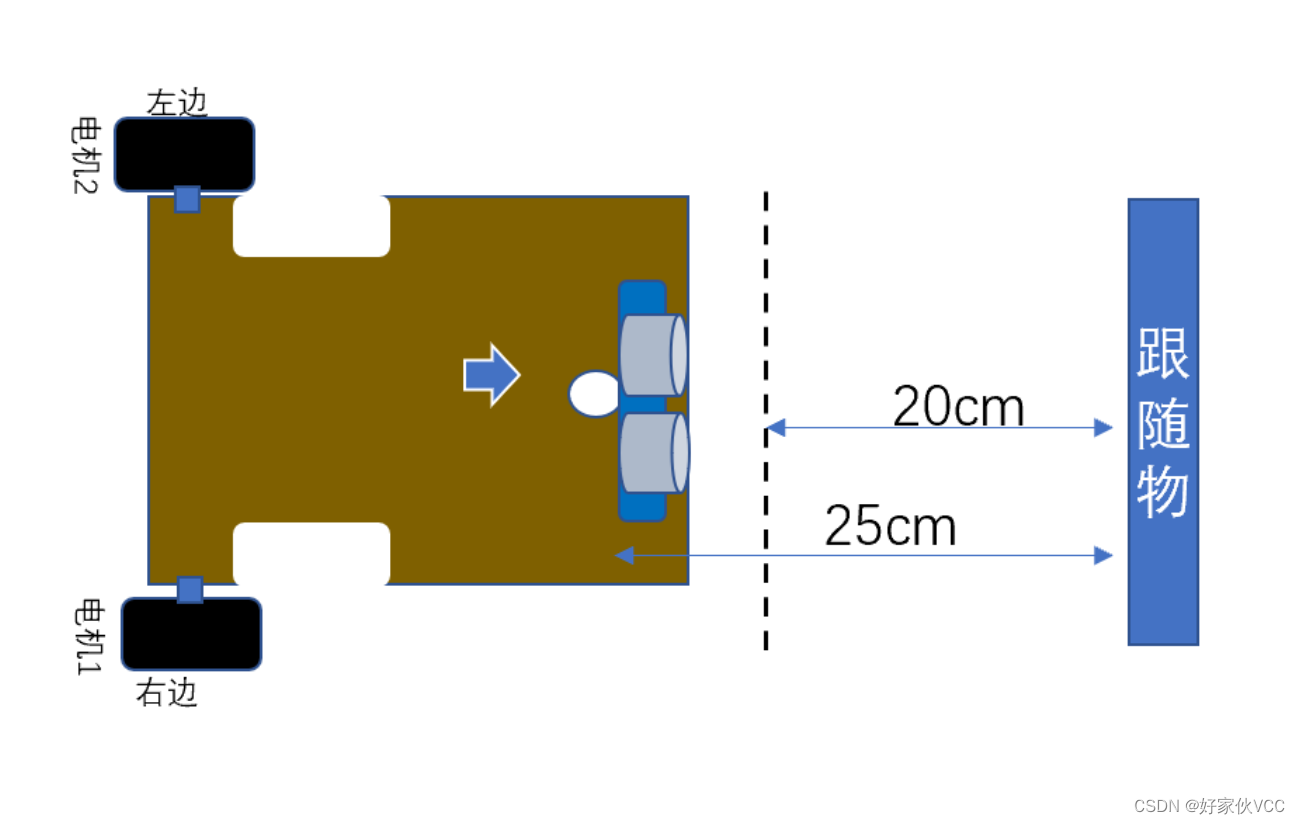

//超聲波跟隨
if(HC_SR04_Read() > 25)
{
motorForward();//前進
HAL_Delay(100);
}
if(HC_SR04_Read() < 20)
{
motorBackward();//后退
HAL_Delay(100);
}
PID跟隨功能

在pid.c中定義一組PID參數
tPid pidFollow; //定距離跟隨PID
pidFollow.actual_val=0.0;
pidFollow.target_val=22.50;//定距離跟隨 目標距離22.5cm
pidFollow.err=0.0;
pidFollow.err_last=0.0;
pidFollow.err_sum=0.0;
pidFollow.Kp=-0.5;//定距離跟隨的Kp大小通過估算PID輸入輸出數據,確定大概大小,然后在調試
pidFollow.Ki=-0.001;//Ki小一些
pidFollow.Kd=0;

//**********PID跟隨功能***********//
g_fHC_SR04_Read=HC_SR04_Read();//讀取前方障礙物距離
if(g_fHC_SR04_Read < 60){ //如果前60cm 有東西就啟動跟隨
g_fFollow_PID_Out = PID_realize(&pidFollow,g_fHC_SR04_Read);//PID計算輸出目標速度 這個速度,會和基礎速度加減
if(g_fFollow_PID_Out > 6) g_fFollow_PID_Out = 6;//對輸出速度限幅
if(g_fFollow_PID_Out < -6) g_fFollow_PID_Out = -6;
motorPidSetSpeed(g_fFollow_PID_Out,g_fFollow_PID_Out);//速度作用與電機上
}
else motorPidSetSpeed(0,0);//如果前面60cm 沒有東西就停止
HAL_Delay(10);//讀取超聲波傳感器不能過快

然后編譯,燒錄測試 。
下一章節 我們開始使用6050 講解6050使用和如何和PID結合一起
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
超聲波
+關注
關注
63文章
2990瀏覽量
138232 -
STM32
+關注
關注
2266文章
10871瀏覽量
354800 -
小車
+關注
關注
0文章
54瀏覽量
20889
發布評論請先 登錄
相關推薦
基于labview的超聲波探傷
有沒有大神做過基于labview的超聲波探傷畢業設計,因為沒有可以發出超聲波的儀器,特求一份基于labview超聲波回聲信號數據!十分感謝!
發表于 05-20 15:08
基于STM32超聲波測距設計的合集
ARM內核芯片STM32F103ZET6的32位嵌入式微處理器與帶有溫度補償的US-100超聲波測距模塊實現聲波測距。STM32的串口資源相當豐富,能提供5
發表于 09-05 16:13
基于單片機的超聲波測距系統實現
實現大家可用于 課程設計 或 畢業設計技術解答畢設幫助:7468760412 主要器件主控:stm32LCD顯示屏HC-SR04超聲波模塊HC-SR04
發表于 11-10 08:53
51超聲波跟隨小車1602顯示相關資料分享
51超聲波跟隨小車1602顯示#include#include #define LCM_DataP0#define Busy 0x80 //用于檢測LCM狀態字中的Busy標識***it RX=P3
發表于 01-05 08:06
怎樣去設計一個基于STM32三路超聲波避障小車
一般學習單片機的第一步就是做智能小車,通過PWM控制調節車速,以及使用超聲波模塊進行輸入捕獲,而這篇文章在于多通道實現輸入捕獲,因為用到了3個超聲波。詳細講解了輸入捕獲的原理以及一些重要功能
發表于 02-24 06:04
基于STM32三路超聲波避障小車
一般學習單片機的第一步就是做智能小車,通過PWM控制調節車速,以及使用超聲波模塊進行輸入捕獲,而這篇文章在于多通道實現輸入捕獲,因為用到了3個超聲波。詳細講解了輸入捕獲的原理以及一些重要功能
發表于 01-12 17:36
?25次下載

第七章-V1.5 STM32超聲波測距STM32F103C8t6超聲波避障小車 超聲波避障模塊 STM32超聲波測距
5STM32超聲波測距STM32F103C8t6超聲波避障小車






 工商網監
工商網監
評論