") 19.4-STM32接收數(shù)據(jù)-狀態(tài)顯示在屏幕 openMV尋跡與小車控制 Openmv+STM32F103C8T6視覺巡線小車
19.4-STM32接收數(shù)據(jù)-狀態(tài)顯示在屏幕 openMV尋跡與小車控制 Openmv+STM32F103C8T6視覺巡線小車
** **功能介紹放開頭, 使用便捷無需愁
這是全網(wǎng)最詳細(xì)、性價(jià)比最高的STM32實(shí)戰(zhàn)項(xiàng)目入門教程,通過合理的硬件設(shè)計(jì)和詳細(xì)的視頻筆記介紹,硬件使用STM32F103主控資料多方便學(xué)習(xí),通過3萬字筆記、12多個(gè)小時(shí)視頻、20多章節(jié)代碼手把手教會(huì)你如何開發(fā)和調(diào)試。讓你更快掌握嵌入式系統(tǒng)開發(fā)。
**V3.3.0-STM32智能小車 **
**視頻: **[https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click]
V3:HAL庫開發(fā)、功能:PID速度控制、PID循跡、PID跟隨、遙控、避障、PID角度控制、視覺控制、電磁循跡、RTOS等功能。
19.4-STM32接收數(shù)據(jù)-狀態(tài)顯示在屏幕
STM32有視覺循跡模式、該模式下接收到數(shù)據(jù)根據(jù)狀態(tài)顯示在屏幕上,現(xiàn)在此狀態(tài)并不控制電機(jī)。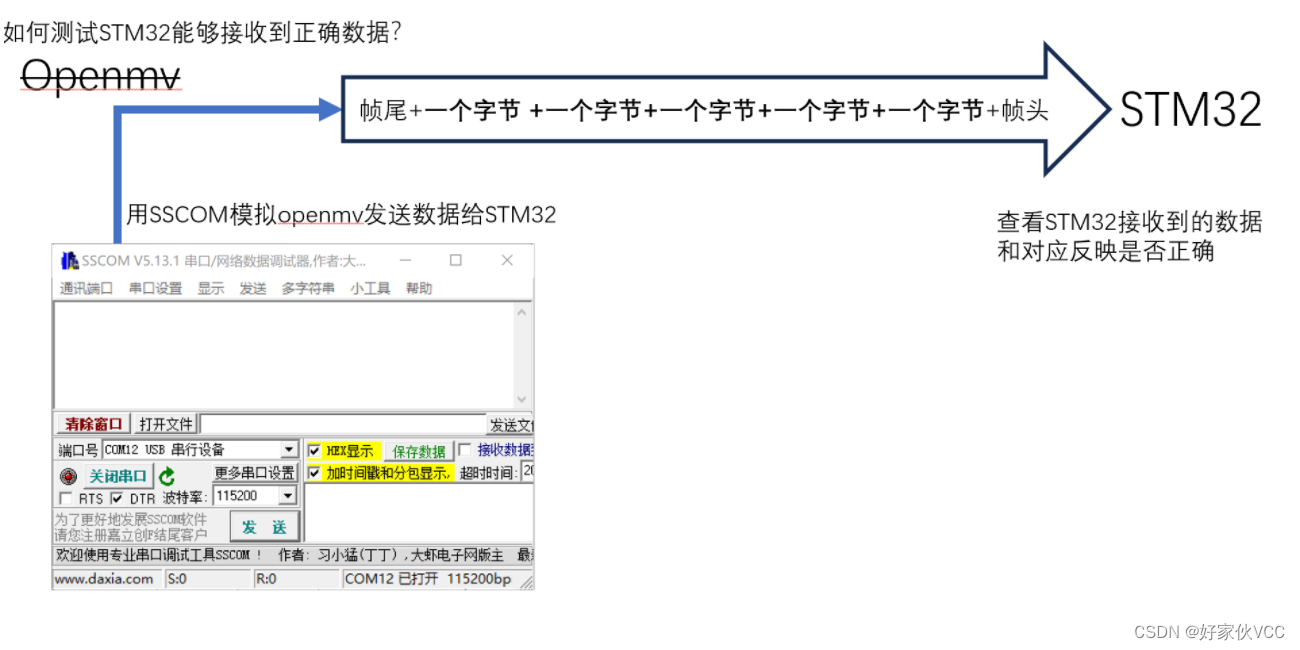
復(fù)制一下18在上面基礎(chǔ)改,命名成****19-4_LED
可以先復(fù)制到桌面英文路徑,防止出現(xiàn)中文路徑兼容問題。

看原理圖攝像頭是預(yù)留什么引腳
PCB中可以看到接口位置
所以我們要初始化一下串口二,然后開啟串口接收中斷
串口2 開啟初始化

開啟串口中斷
生成代碼
打開代碼

如果發(fā)現(xiàn)18章代碼經(jīng)常出現(xiàn)黑屏,那可能就是6050的初始化卡住了,我們可以注釋掉一下MPU6050部分的代碼。


我們先定義一個(gè)串口二接收數(shù)據(jù)變量
uint8_t g_ucUsart2ReceiveData; //保存串口二接收的數(shù)據(jù)

開啟接收中斷
HAL_UART_Receive_IT(&huart2,&g_ucUsart2ReceiveData,1); //串口二接收數(shù)據(jù)

聲明一下變量
extern uint8_t g_ucUsart2ReceiveData; //保存串口二接收的數(shù)據(jù)

我們需要在串口中斷回調(diào)函數(shù)中加入我們對(duì)接收到數(shù)據(jù)的解析
if(huart == &huart2)//判斷中斷源 是否來自串口二
{
//這里增加解析函數(shù)
HAL_UART_Receive_IT(&huart2,&g_ucUsart2ReceiveData,1); //啟動(dòng)串口二接收數(shù)據(jù)
}

在usart.c文件中定義一個(gè)函數(shù)

/*******************
* @brief 攝像頭串口協(xié)議解析函數(shù) 可以連接K210或openmv等
* @param data:串口接收到的每個(gè)字節(jié)
* @return
*
*******************/
void usartCamera_Receive_Data(uint8_t data)
{
static uint8_t state = 0;//定義靜態(tài)static 變量
if(state==0&&data==0xA5) //判斷第一個(gè)是不是幀頭0xA5
{
state=1;//是幀頭0xA5 賦值state=1 表示接收下一個(gè)數(shù)據(jù)
//數(shù)據(jù)存儲(chǔ)在數(shù)組中 "g_ucUsart2ReceivCounter++",這里是先用后加,比如g_ucUsart2ReceivCounter 初值為0,執(zhí)行這個(gè)是先g_ucaUsart2ReceiveBuffer[0]=data,然后g_ucUsart2ReceivCounter++,即后g_ucUsart2ReceivCounter = 1的
g_ucaUsart2ReceiveBuffer[g_ucUsart2ReceivCounter++] = data;
}
else if(state==1&&data==0xA6) //第二個(gè)是不是幀頭0xA6
{
state=2;//如果第二個(gè)是幀頭0xA6 賦值state=2 表示接收下一個(gè)數(shù)據(jù)
g_ucaUsart2ReceiveBuffer[g_ucUsart2ReceivCounter++] = data;//保存數(shù)據(jù)
}
else if(state==2)//然后確定開頭是0XA5 0XA6 就開始接收
{
g_ucaUsart2ReceiveBuffer[g_ucUsart2ReceivCounter++]=data;
if(g_ucUsart2ReceivCounter >9||data==0x5B) state=3; //接收大于9個(gè)或者接收到幀尾0X5B 就置位狀態(tài)三
}
else if(state==3) //狀態(tài)三
{
if(g_ucaUsart2ReceiveBuffer[g_ucUsart2ReceivCounter-1] == 0x5B) //確定 最后一個(gè)是不是0x5B幀尾 是幀尾0x5B 就認(rèn)為通信正確 處理數(shù)據(jù)
{
state = 0;//這里就可以處理數(shù)據(jù)了、處理完記得清空數(shù)組和重置標(biāo)志位與計(jì)數(shù)值
g_ucUsart2ReceivCounter = 0;//清零計(jì)數(shù)值
//比如根據(jù)數(shù)據(jù)設(shè)置紅外旋轉(zhuǎn)偏移狀態(tài)
?
//1.設(shè)置快速 慢速右邊 左邊 數(shù)字存儲(chǔ)的變量意義: [0]和[1]:幀頭、[2]:攝像頭左邊數(shù)第一個(gè)感興趣區(qū)域、[3]:左邊第二個(gè)、[4]:左邊第三個(gè)、[5]:左邊第四個(gè)、[6]:左邊第五個(gè)、[7]:幀尾
if(g_ucaUsart2ReceiveBuffer[6]==0&&g_ucaUsart2ReceiveBuffer[5]==0&&g_ucaUsart2ReceiveBuffer[3]==0&&g_ucaUsart2ReceiveBuffer[2]==0)
{
g_cThisState=0;//前進(jìn)
g_lHW_State=22222;//設(shè)置這個(gè)顯示在OLED上方便調(diào)試 五個(gè)值 以此從左向右表示 從左向右的五個(gè)區(qū)域
}
if(g_ucaUsart2ReceiveBuffer[6]==0&&g_ucaUsart2ReceiveBuffer[5]==1&&g_ucaUsart2ReceiveBuffer[3]==0&&g_ucaUsart2ReceiveBuffer[2]==0)
{
g_cThisState=-1;//應(yīng)該右轉(zhuǎn)
g_lHW_State=22212;//表示右數(shù)第二個(gè) 識(shí)別到線
}
if(g_ucaUsart2ReceiveBuffer[6]==1&&g_ucaUsart2ReceiveBuffer[5]==0&&g_ucaUsart2ReceiveBuffer[3]==0&&g_ucaUsart2ReceiveBuffer[2]==0)
{g_cThisState=-2;//快速右轉(zhuǎn)
g_lHW_State=22221;
}
if(g_ucaUsart2ReceiveBuffer[6]==1&&g_ucaUsart2ReceiveBuffer[5]==1&&g_ucaUsart2ReceiveBuffer[3]==0&&g_ucaUsart2ReceiveBuffer[2]==0)
{g_cThisState=-3;//快速右轉(zhuǎn)
g_lHW_State=22211;
}
if(g_ucaUsart2ReceiveBuffer[6]==0&&g_ucaUsart2ReceiveBuffer[5]==0&&g_ucaUsart2ReceiveBuffer[3]==1&&g_ucaUsart2ReceiveBuffer[2]==0)
{g_cThisState=1;//應(yīng)該左轉(zhuǎn)
g_lHW_State=21222;
}
if(g_ucaUsart2ReceiveBuffer[6]==0&&g_ucaUsart2ReceiveBuffer[5]==0&&g_ucaUsart2ReceiveBuffer[3]==0&&g_ucaUsart2ReceiveBuffer[2]==1)
{g_cThisState=2;//快速左轉(zhuǎn)
g_lHW_State=12222;
}
if(g_ucaUsart2ReceiveBuffer[6]==0&&g_ucaUsart2ReceiveBuffer[5]==0&&g_ucaUsart2ReceiveBuffer[3]==1&&g_ucaUsart2ReceiveBuffer[2]==1)
{g_cThisState=3;//快速左轉(zhuǎn)
g_lHW_State=11222;
}
?
//2.然后清空數(shù)組
for(int i=0;i< 10;i++) g_ucaUsart2ReceiveBuffer[i]=0x00;//清空數(shù)組
}
else //不是幀尾說明通信錯(cuò)誤重新開始接收
{
state=0;
g_ucUsart2ReceivCounter =0;
for(int i=0;i< 10;i++) g_ucaUsart2ReceiveBuffer[i]=0x00;//清空數(shù)組
}
}
else
{//其他異常清空
state=0;
g_ucUsart2ReceivCounter =0;
for(int i=0;i< 10;i++) g_ucaUsart2ReceiveBuffer[i]=0x00;//清空數(shù)組
}
}
然后聲明一下變量
extern int8_t g_cThisState ;//這次狀態(tài)

定義一個(gè)變量 并且在main文件中聲明一下
int g_lHW_State = 0;//幫助視覺調(diào)試 用于表示紅外對(duì)管或者視覺攝像頭識(shí)別狀態(tài)

聲明一下
extern int g_lHW_State;//幫助視覺調(diào)試 用于表示紅外對(duì)管或者視覺攝像頭識(shí)別狀態(tài)

我們需要再定義模式,這個(gè)模式是視覺循跡模式
視覺模式下 我們顯示一下,我們之前賦值的變量 以測(cè)試我們接收的數(shù)據(jù)是否正確。
//這里編寫觸發(fā)中斷后要執(zhí)行的程序
if(g_ucMode == 6) g_ucMode = 1;//g_ucMode模式是0 1 2 3 4 5 6
else
{
g_ucMode+=1;
}

增加模式6,的功能,我們先只顯示視覺識(shí)別結(jié)果
if(g_ucMode == 6)
{
sprintf((char*)OledString, "lHW:%d ", g_lHW_State);//視覺識(shí)別結(jié)果
OLED_ShowString(0,0,OledString,12);//這個(gè)是oled驅(qū)動(dòng)里面的,是顯示位置的一個(gè)函數(shù),
motorPidSetSpeed(0,0);//停住電機(jī)防止亂跑 方便調(diào)試
}

別忘記我們的解析函數(shù),加到串口中斷處理函數(shù)中
usartCamera_Receive_Data(g_ucUsart2ReceiveData);

修改上面程序經(jīng)過測(cè)試,單片機(jī)
編譯上面程序,并燒錄到我們的單片機(jī)、單片機(jī)連接到電腦、然后電腦模擬openmv發(fā)送正確格式的數(shù)據(jù),手動(dòng)點(diǎn)擊SSCOM發(fā)送數(shù)據(jù)、單片機(jī)可以接收到數(shù)據(jù)并顯示在OLED上(觀察的是OLED的第一行數(shù)值變化)、當(dāng)我們?cè)O(shè)置每1ms發(fā)送一次數(shù)據(jù)時(shí)候,單片機(jī)的OLED有時(shí)候會(huì)出現(xiàn)卡死的情況。所以是單片機(jī)串口接收大量數(shù)據(jù)卡死的情況,經(jīng)過網(wǎng)上搜索發(fā)現(xiàn)解決問題的辦法。
這個(gè)博客是搜索到可以解決問題的鏈接: [https://blog.csdn.net/qq_44629109/article/details/131002223]
參考博客如下部分:
所以我們要更改如下代碼:
__HAL_UART_ENABLE_IT(&huart2, UART_IT_ERR);// 啟用UART2的錯(cuò)誤中斷功能

在USART.C 中添加如下代碼
/* UART 錯(cuò)誤回調(diào)函數(shù) 處理串口錯(cuò)誤 */
void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart)
{
if(__HAL_UART_GET_FLAG(huart,UART_FLAG_ORE) != RESET) //使用__HAL_UART_GET_FLAG宏檢查UART的overrun錯(cuò)誤標(biāo)志位是否被置位。如果返回值不等于RESET,表示overrun錯(cuò)誤標(biāo)志位被置位,即發(fā)生了overrun錯(cuò)誤
{
__HAL_UART_CLEAR_OREFLAG(huart);//使用__HAL_UART_CLEAR_OREFLAG宏清除UART的overrun錯(cuò)誤標(biāo)志位
HAL_UART_Receive_IT(&huart2,&g_ucUsart2ReceiveData,1); //使用HAL庫函數(shù)啟動(dòng)UART2接收中斷,并設(shè)置接收緩沖區(qū)的大小為1字節(jié)
}
}

添加串口2接收變量的聲明
extern uint8_t g_ucUsart2ReceiveData; //保存串口二接收的數(shù)據(jù)

讓單片機(jī)處于模式6(按六下 KEY1)
上面我們測(cè)試通過上位機(jī)發(fā)送數(shù)據(jù),然后觀察屏幕。
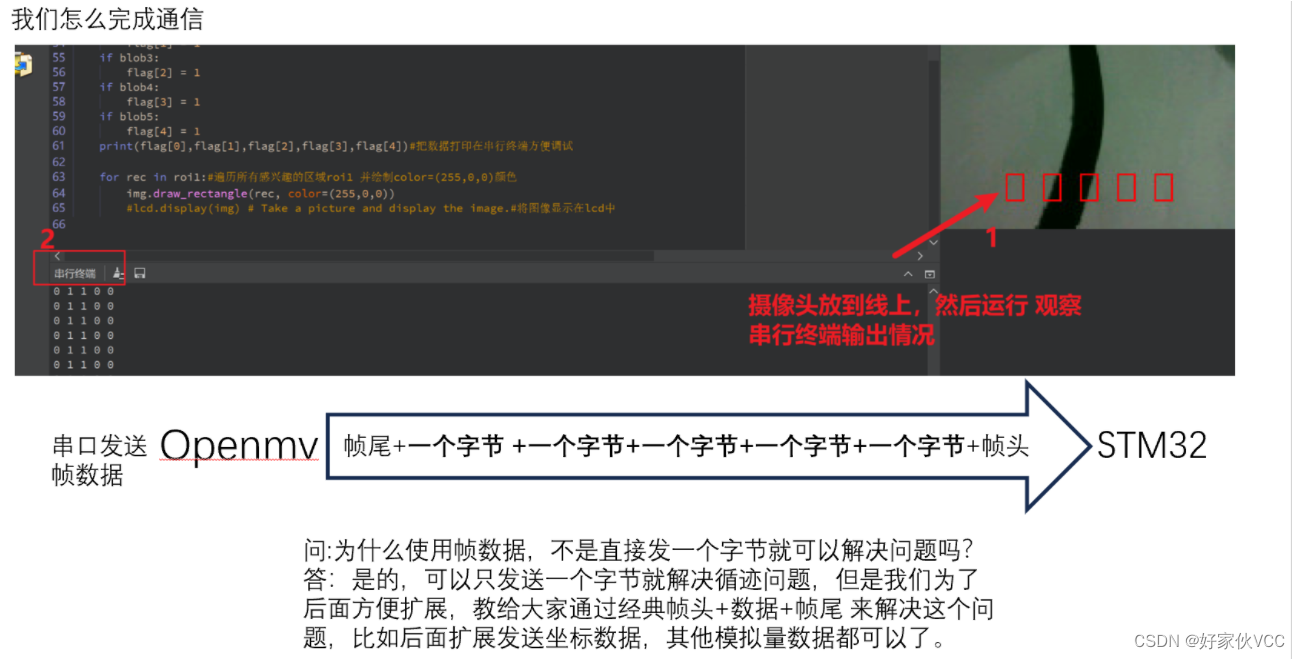
然后我們把STM32底板接到openmv,openmv連接電腦,openmv使用的程序是19章3節(jié)的程序****19-3-openmv
然后上面如果沒有問題,就可以把openmv 程序通過"將打開的腳本保存到openmv Cam(作為main.py)"
接法如下:
這里就說明了如何接受的數(shù)據(jù),后面的19.5講解利用數(shù)據(jù)
審核編輯 黃宇
-
嵌入式
+關(guān)注
關(guān)注
5044文章
18805瀏覽量
298374 -
小車
+關(guān)注
關(guān)注
0文章
54瀏覽量
20708 -
STM32F103C8T6
+關(guān)注
關(guān)注
105文章
160瀏覽量
82447 -
尋跡
+關(guān)注
關(guān)注
0文章
6瀏覽量
12508 -
openMV
+關(guān)注
關(guān)注
3文章
39瀏覽量
9757
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
19.3-星曈科技 openmv Hopenmv發(fā)送五個(gè)uchar Openmv+STM32F103C8T6視覺巡線小車 STM32循跡小車系列教程
通過STM32輸出PWM波給驅(qū)動(dòng)模塊進(jìn)行小車運(yùn)動(dòng)狀態(tài)的控制
基于stm32紅外巡線小車的設(shè)計(jì)資料分享
基于openMV的追球小車設(shè)計(jì)資料分享
基于openmv與51小車串口通信巡線的相關(guān)資料推薦
基于OPENMV和STM32的識(shí)別追蹤小車設(shè)計(jì)實(shí)現(xiàn)
基于stm32的紅外巡線小車(基礎(chǔ)版)

基于openmv與51小車的串口通信巡線
循跡識(shí)別小車:(二)STM32部分
OPENMV和STM32的識(shí)別追蹤小車(詳細(xì)版)之OPENMV端
【DIY】基于OpenMV的STM32追球小車





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論