 人形機器人新品大爆發!突破關節極限,AI融合跨過“聰明”難關,進入萬元階段
人形機器人新品大爆發!突破關節極限,AI融合跨過“聰明”難關,進入萬元階段
電子發燒友網報道(文/莫婷婷)8月20日,《黑神話:悟空》正式上線后在國內引起關注。就在前一天,機器人公司宇樹科技宣布 G1 人形機器人進行了量產設計升級,升級后能夠進行單腳跳、360° 旋轉跳等動作,官方也展示了其基于端到端和仿真訓練使用棍棒的視頻。讓機器人也能像人一樣靈活是機器人企業在不斷努力的方向。
就在近期,國內多家機器人企業展示了公司最新的機器人進展,除了宇樹科技,浙江人形機器人創新中心、星動紀元、逐際動力等都推出了新品,并且在技術、實用性等多個方面都實現了新的進展。
突破關節極限,人形機器人走向高扭矩、高轉速
宇樹科技的G1 人形機器人是其在5月發布的產品,定價 9.9 萬元起。3個月后,宇樹對其進行量產設計升級,也就是此次發布的是G1 量產版本,更符合量產要求。在性能上,宇樹G1 人形機器人量產版單腳跳、360°旋轉跳、上下樓梯等動作,平衡能力和控制能力都變得更強。
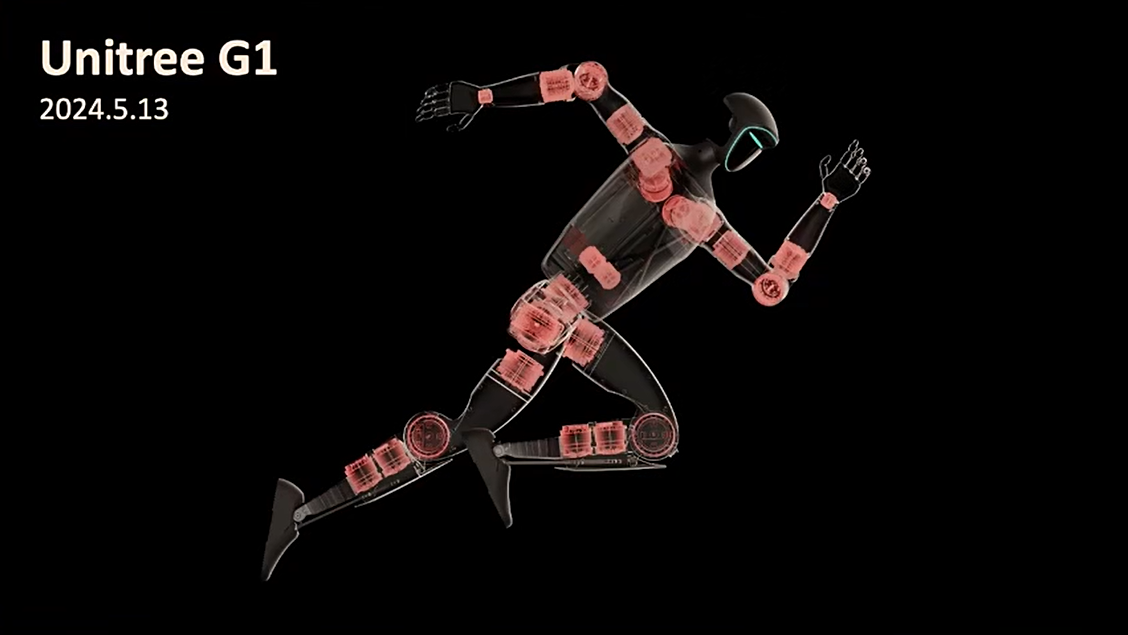
圖:宇樹科技G1 關節布置方案
宇樹科技以機器狗賽道入局,但機器人的復雜度比機器狗要高很多,在動力性能、關節靈活度感知、交互。那么G1 人形機器人量產版的彈跳能力是基于哪些技術迭代實現的呢?
從其介紹來看,機器人的彈跳能力主要得益于其下肢設計和關節電機的最大扭矩。動態平衡控制、傳感器的實時監測、算法的快速處理等多種技術的綜合應用則保證機器人的穩定性。
根據介紹,宇樹的G1身高約127cm,體重約35kg,最大關節扭矩達120N.m,總自由度(關節電機)43個。扭矩的性能是機器人進行強力跳躍的重要物理基礎,扭矩的大小直接關聯到機器人動作的爆發力,較大的扭矩輸出讓機器人能在瞬間釋放能量,實現上升和前進的動力。此外,超大關節運動角度空間,為其帶來了更強的靈活性。
另一家機器人企業星動紀元也發布了公司首款產品級人形機器人——STAR 1。從其產品參數來看,也實現了扭矩和轉速的技術跨越。官方介紹,星動紀元突破關節極限,STAR 1最大關節扭矩400Nm,轉速高達25rad/s。這使得星動STAR1最大奔跑速度高于6m/s,最大負載160kg,耐力負重、高爆發短跑。
機器人四肢的功能性和靈活性是設計的關鍵點,多自由度讓機器人能夠進行復雜的空間運動,提高其適應性和運動能力。通過獨立控制每個關節,機器人可以調整其姿態以適應不同的地表。
STAR 1總自由度達到55個,四肢活動范圍進一步提升。雙腿有12個(6x2)自由度,雙臂有14個(7X2)自由度,腰、頸各有3個和2個自由度,單手12個主動自由度。星動紀元表示,STAR 1有12 DOF全驅動,實現高精度觸覺。
宇樹科技的G1機器人配備了23到43個關節電機,擁有43個自由度,單手臂自由度為肩關節3個+肘關節2個+腕關節2個(選配),單腿自由度為髖關節3個+膝關節1個+踝關節2個,可以完成跳躍、旋轉等復雜動作。由此看星動紀元STAR 1在運動性能上也不差,從其宣傳圖看到STAR 1還能舉重。

圖:星動紀元STAR 1
目前來看,浙江人形機器人創新中心的領航者2號NAVIAI和星動紀元STAR 1、宇樹科技G1都為其機器人打造了高精度輕量化仿人臂,領航者2號NAVIAI單臂負載 5 公斤,操作精度 ≤0.1 mm。宇樹科技G1單臂負載3公斤。
感知能力升級,靈巧手更智能
當前,機器人行業都在探索AGI(通用人工智能),具身智能被認為是通往AGI的關鍵之路。需要認識到的是具身智能是一個漸進化的過程,因為智能體需要收集聽覺、視覺、定位等各種信息,需要有充足的傳感器,例如視覺、觸覺、慣性、距離、位置等傳感器,為其打造學習基礎。
在上肢逐漸成為人形機器人具身智能的焦點的時候,靈巧手成為其關鍵部件,更智能的靈巧手具備三個關鍵的特點,一是高自由度,這一點我們在上述提到的新品中都能看到。二是多傳感器。三是結合落地場景的足夠多的數據。更為重要的是,算法的落地也需要更加智能的靈巧手進行配合。
領航者2號NAVIAI靈巧手的自由度為6 DoF,指尖力10 N,關節速度150度/s。逐際動力發布的最新一代全尺寸人形機器人CL-2正是配備了全新的靈巧手,能夠完成更多動作。
從近期發布的新品看到,人形機器人不僅在運動能力上實現了技術的跨越,在感知能力上同樣迎來了迭代。
除了上述提到的靈巧手的感知,領航者2號NAVIAI還配備了多目環視相機、IMU、RGBD 傳感器。宇樹科技G1配備了3D LiDAR和RealSense深度攝像頭。這些傳感器讓機器人能夠實時感知和導航周圍環境。STAR 1的手、眼(視覺傳感器)位置的設計完全模擬人類,可以最大限度地復用人類數據,使得機器人在感知、識別、交互等方面更加自然流暢。
走向具身智能,AI+人形機器人實現落地
在走向具身智能的過程中,AI技術的高速發展為其帶來了更多的可能性。那么AI跟機器人能夠怎么融合,大模型接入機器人進展如何?
隨著人形機器人需要處理的信息越來越多,我們在近期發布的人形機器人中也能看到機器人對于AI算力的需求也在不斷提升。
星動紀元STAR 1的AI算力達到了275 TOPS,根據介紹,STAR 1 采用了硬件模塊化設計理念,使得人形機器人的本體構造支持完全復用,智能算法能夠實現無縫切換。STAR 1 內置AI大模型,支持模仿學習與強化學習,可以不斷學習優化步伐穩定性和上肢靈活性。
領航者2號NAVIAI采用11代17高性能CPU,可升級13代17高性能CPU,GPU算力為275 TOPS。
在接入AI能力后,領航者2號NAVIAI具備擬人全身模仿學習、類人具身智能導航的能力。采用隱空間優化與融合模型預測控制的動作模仿學習,能夠快速學習新動作,實現高自由度作業臂連續動態運動下穩定站立。類人具身智能導航的能力是采用大模型結合強化學習的決策規劃框架,兼顧用戶指令理解與開放空間感知。
深度強化學習算法也是近幾年業內主流的技術路徑,且發展得比較領先。宇樹科技創始人兼CEO王興興表示,人形機器人和四足機器人可以使用幾乎完全相同的深度強化學習算法。宇樹科技的四足機器人、人形機器人的運作控制算法采用的是強化學習算法。
宇樹科技G1可以選配NVIDIA Jetson Orin,采用端到端感知+深度強化學習的技術路徑。端到端感知讓人形機器人的智能交互導航能力更加精確,這也是宇樹G1能夠順利判斷樓梯上是否有障礙物、樓梯高度等因素,進行步態規劃。
未來深度強化學習還能往更多的方向發展,王興興提到了四個方面,一是全身任意姿態或舞蹈等動作,模仿深度強化學習。二是復雜地形下,全身任意穩定運動。三是手部,復雜物品或零部件,較復雜靈巧操作。四是基于圖像或深度數據,感知數據的強化學習導航避障。
關于AI大模型接入人形機器人,宇樹科技在研發過程中也發現了一些問題,在接入AI大模型后,人形機器人具備了語音交互的能力,也可以讓大語言模型規劃一些功能讓機器人去執行,“但實際上最終效果不是特別理想,因為做的事情都是提前規劃好的動作和功能,如果超出這些認知范圍,它的規劃能是比較差的,并且每次的成功率并不是特別高。同樣的一個問題,或者跟它講一樣的話,再次與它交流時,機器人有可能理解也不是特別到位。”王興興提到。
大語言模型在實現 AGI 的路上是否繞了很大的彎?未來是否有新的模型可以解決上述出現的問題,也需要機器人產業鏈上的企業共同突破。
小結:
從上述的新品中,也能看到不同的機器人企業打造了各自的技術優勢,并且為其產品打造了差異化競爭。
例如領航者2號NAVIAI是首個具有精確技能作業能力的人形機器人,具備了通用高精智能操作的優勢,突破了長序列操作任務行為決策與可泛化高精度伺服控制技術,支持物品搬運、物品抓放、伺服插孔。宇樹科技G1在下肢穩定性、平衡能力也具備的技術優勢,能夠進行彈跳、后空翻等動作。星動紀元STAR 1則憑借其在扭矩、轉速等明顯的技術優勢,運動靈活性和承載能力更強。
值得期待的是,在AI加速下的機器人技術,每天都在升級進化。也就是說,人形機器人將在使用過程中不斷進化,或許今年是年齡為一歲的STAR 1,跟你生活一年甚至幾年后,就已經能夠更加懂你,且更加聰明了。
-
人形機器人
+關注
關注
2文章
421瀏覽量
16483
發布評論請先 登錄
相關推薦
9.9萬元行業最低售價!宇樹智能人形機器人G1發布:“每天都在升級進化”

“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
專為人形機器人應用打造,助力具身智能行業發展,泰科機器人關節模組持續升級!

Figure AI發布革新性人形機器人Figure 02

價格打下來了,只要9.9萬,人形機器人的春天來了嗎?

泰科機器人攜新款行星滾柱絲杠線性關節模組和雙臂協作機器人亮相2024年ITES深圳工業展

人形機器人成為車圈“新寵”?

?大象機器人首發萬元級水星Mercury人形機器人系列

優必選登陸港交所,人形機器人產業將進入全新發展階段
大象機器人發布萬元級水星Mercury人形機器人產品系列






 工商網監
工商網監
評論