 串級控制pid參數怎么調節
串級控制pid參數怎么調節
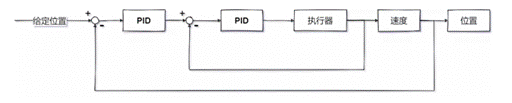
串級控制(Cascade Control)是一種先進的控制策略,廣泛應用于工業自動化領域。它通過將一個控制系統分解為兩個子控制系統,即主控制器和副控制器,實現對復雜過程的精確控制。在串級控制系統中,PID(比例-積分-微分)控制器是常用的控制算法。本文將介紹串級控制PID參數的調節方法。
1. 串級控制的基本原理
串級控制由兩個控制器組成:主控制器和副控制器。主控制器負責設定整個系統的輸出,而副控制器則負責調節主控制器的設定值,以實現對過程變量的精確控制。
2. PID控制器的基本概念
PID控制器是一種線性控制器,它根據誤差信號(期望值與實際值之差)來計算控制量。PID控制器由三個部分組成:
- 比例(P) :根據誤差的大小來調整控制量。
- 積分(I) :根據誤差隨時間的積累來調整控制量,以消除穩態誤差。
- 微分(D) :根據誤差的變化趨勢來調整控制量,以提高系統的響應速度。
3. 串級控制PID參數調節的一般步驟
3.1 確定控制目標和性能指標
在調節PID參數之前,首先需要明確控制目標和性能指標,如超調量、上升時間、穩態誤差等。
3.2 初步設定PID參數
在沒有經驗的情況下,可以采用以下經驗公式進行初步設定:
- P:根據系統的響應速度,選擇一個適中的比例增益。
- I:如果系統存在穩態誤差,可以適當增加積分增益。
- D:如果系統需要快速響應,可以適當增加微分增益。
3.3 調整主控制器PID參數
主控制器的PID參數調整通常遵循以下步驟:
- 比例增益調整 :增大比例增益可以提高系統的響應速度,但過大的比例增益可能導致系統超調。
- 積分增益調整 :增大積分增益可以消除穩態誤差,但過大的積分增益可能導致系統的穩定性下降。
- 微分增益調整 :增大微分增益可以提高系統的響應速度,但過大的微分增益可能導致系統的振蕩。
3.4 調整副控制器PID參數
副控制器的PID參數調整通常遵循以下步驟:
- 比例增益調整 :副控制器的比例增益通常設置為主控制器的1/10到1/100。
- 積分增益調整 :副控制器的積分增益通常設置為主控制器的1/10到1/100。
- 微分增益調整 :副控制器的微分增益通常設置為主控制器的1/10到1/100。
3.5 參數優化
在初步設定和調整PID參數后,需要進行參數優化,以實現最佳的控制效果。優化方法包括:
- 試錯法 :通過不斷調整參數,觀察系統響應,逐步找到最優參數。
- 響應曲線法 :通過繪制系統響應曲線,分析超調量、上升時間等性能指標,進行參數調整。
- 優化算法 :使用遺傳算法、粒子群算法等優化算法,自動搜索最優參數。
4. 串級控制PID參數調節的注意事項
- 穩定性 :在調整PID參數時,要確保系統的穩定性,避免參數過大導致系統振蕩。
- 超調量 :要控制超調量在可接受范圍內,以保證系統的平穩運行。
- 響應速度 :根據實際需求,合理選擇響應速度,避免過快或過慢。
- 穩態誤差 :通過調整積分增益,消除或減小穩態誤差。
- 參數整定 :在實際應用中,可能需要多次整定參數,以達到最佳控制效果。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制系統
+關注
關注
41文章
6550瀏覽量
110498 -
PID
+關注
關注
35文章
1471瀏覽量
85306 -
參數
+關注
關注
11文章
1791瀏覽量
32110 -
串級控制
+關注
關注
0文章
7瀏覽量
9209
發布評論請先 登錄
相關推薦
X小四軸串級PID調節振蕩
我將小四軸的兩端用繩子固定在椅子上,調節俯仰內環PID,可是我僅調節內環P參數時,四軸一開始總是往前倒,總是后面兩個電機的力度比前兩個電機的力度大,加入D后可以在平衡位置維持一會,然后
發表于 05-07 06:36
基于串級PID控制技術的堆垛機控制器的設計
本文從提高堆垛機作業系統的工作效率和可靠性的角度出發,利用串級控制原理和積分分離的PID 算法,建立了堆垛機串
發表于 08-29 11:41
?14次下載






 工商網監
工商網監
評論