") 驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(11)----磁力計校準
驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(11)----磁力計校準
概述
磁力計校準是確保傳感器數(shù)據(jù)準確性和可靠性的關(guān)鍵步驟。磁力計用于測量地球磁場,并在導航、定位、姿態(tài)測量等應(yīng)用中起到重要作用。然而,磁力計在使用過程中會受到環(huán)境磁場、硬件偏差、安裝誤差等因素的影響,從而導致測量數(shù)據(jù)出現(xiàn)偏差。因此,校準磁力計以消除這些影響,是獲得精確測量數(shù)據(jù)的必要步驟。
本文將介紹如何使用ST提供的MotionFX庫在嵌入式系統(tǒng)中實現(xiàn)磁力計校準, 通過本文的介紹,讀者將能夠理解磁力計校準的基本概念,掌握使用MotionFX庫進行校準的步驟和方法,并學會如何在實際項目中實現(xiàn)磁力計的校準,以獲得高精度的磁場測量數(shù)據(jù)。
需要樣片的可以加群申請:615061293 。

視頻教學
[https://www.bilibili.com/video/BV1BS42197a5/]
樣品申請
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源碼下載
[https://download.csdn.net/download/qq_24312945/89614587]
硬件準備
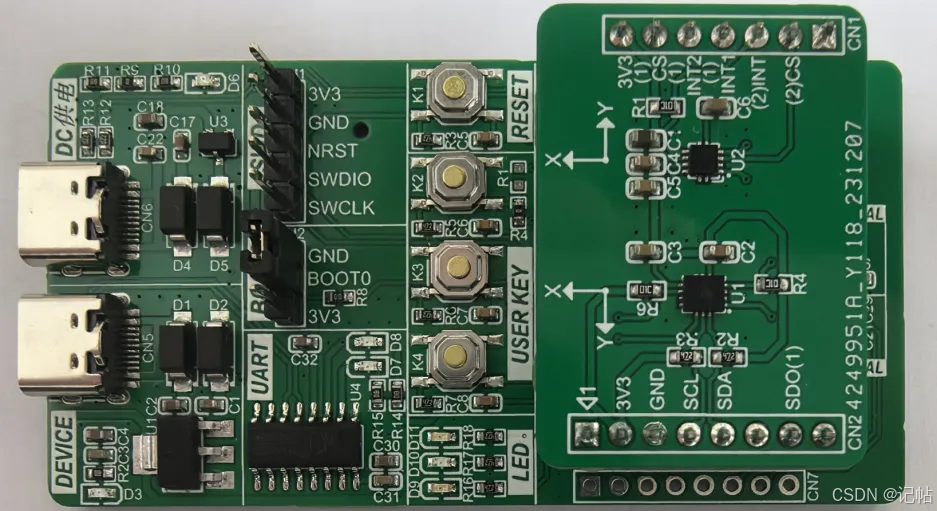
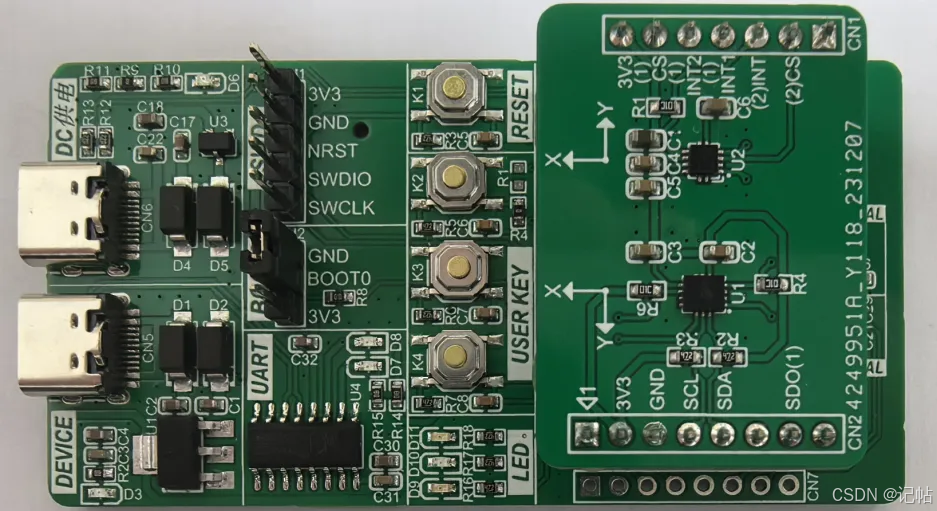
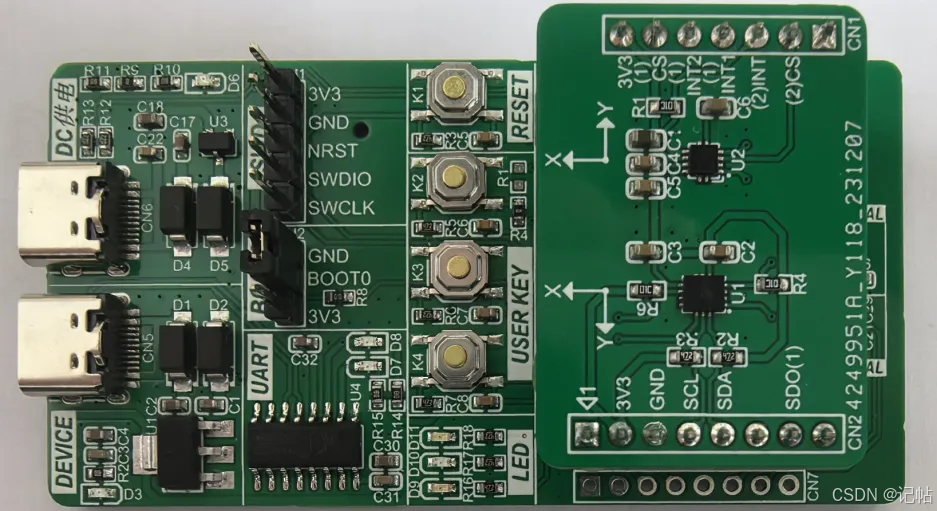
首先需要準備一個開發(fā)板,這里我準備的是自己繪制的開發(fā)板,需要的可以進行申請。
主控為STM32H503CB,陀螺儀為LSM6DS3TR-C,磁力計為LIS2MDL。
DataLogFusion
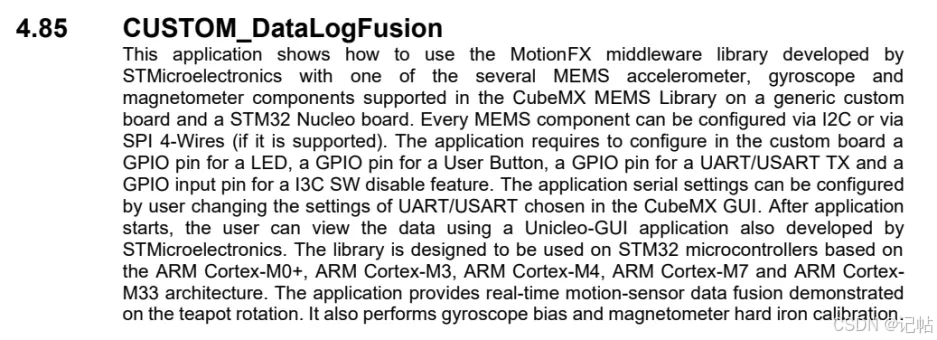
這里參考ST提供的DataLogFusion程序,DataLogFusion示例應(yīng)用展示了如何使用STMicroelectronics開發(fā)的MotionFX中間件庫進行實時運動傳感器數(shù)據(jù)融合。
DataLogFusion的主要執(zhí)行流程包括初始化硬件和傳感器、中間件庫(MotionFX)的配置與初始化、傳感器數(shù)據(jù)的采集、實時數(shù)據(jù)融合以及結(jié)果的輸出。
磁力計校準過程
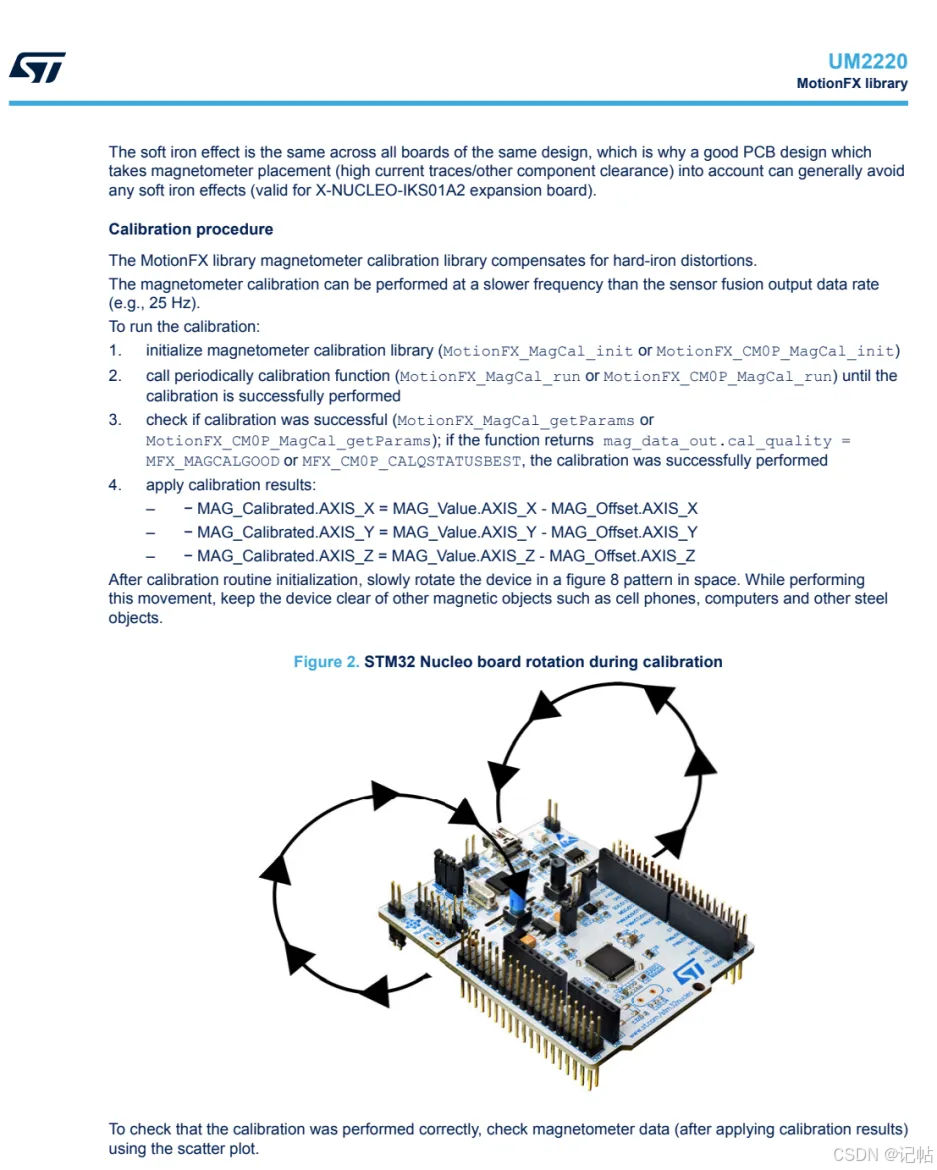
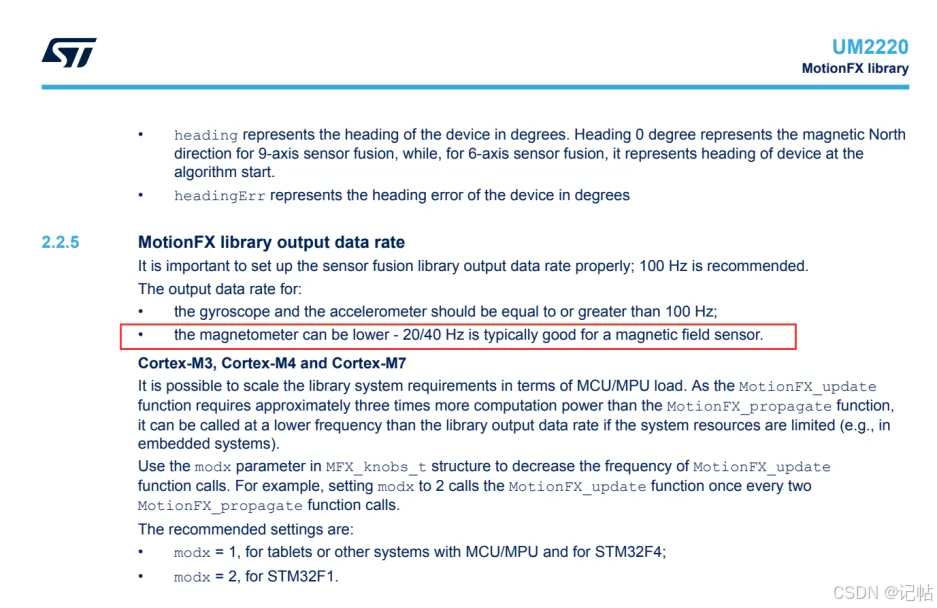
MotionFX庫的磁力計校準庫用于補償硬鐵失真。磁力計校準可以以比傳感器融合輸出數(shù)據(jù)速率更慢的頻率進行(例如25 Hz)。
● 初始化磁力計校準庫:
● 調(diào)用 MotionFX_MagCal_init 或 MotionFX_CM0P_MagCal_init 函數(shù)。
● 定期調(diào)用校準函數(shù):
● 調(diào)用 MotionFX_MagCal_run 或 MotionFX_CM0P_MagCal_run 函數(shù),直到校準成功完成。
● 檢查校準是否成功:
● 調(diào)用 MotionFX_MagCal_getParams 或 MotionFX_CM0P_MagCal_getParams 函數(shù)。如果函數(shù)返回 mag_data_out.cal_quality = MFX_MAGCALGOOD 或 MFX_CM0P_CALQSTATUSBEST,則校準成功。
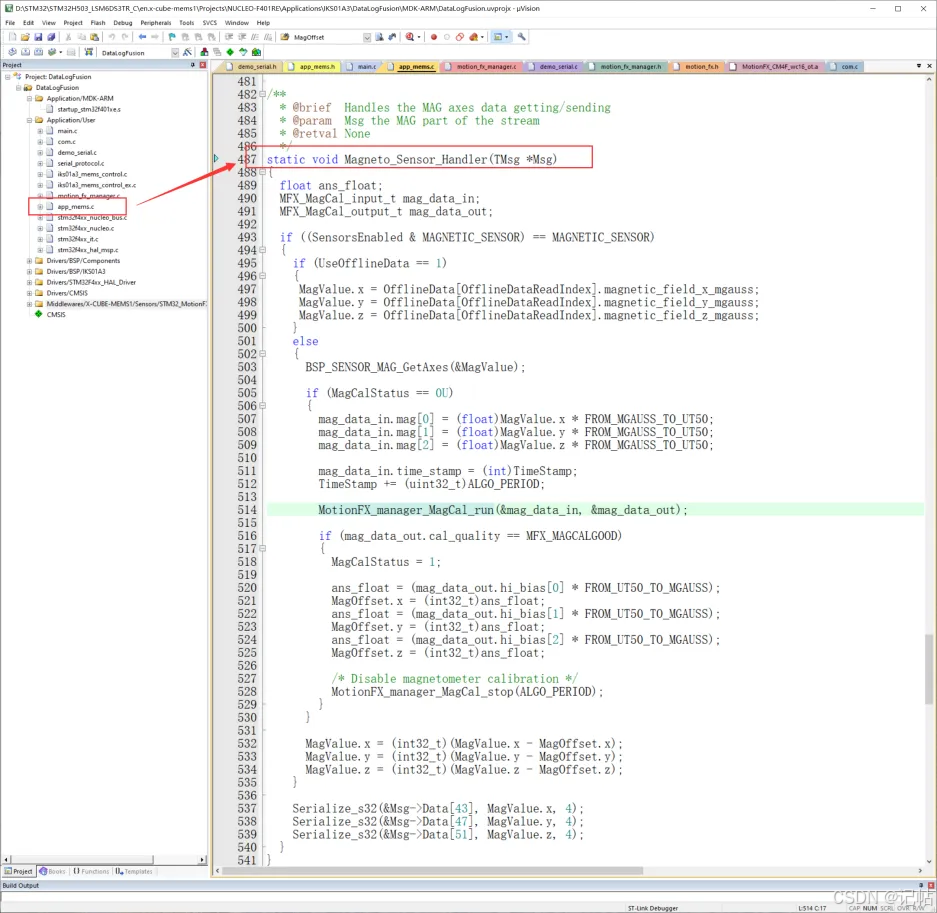
在app_mems.c中的Magneto_Sensor_Handler函數(shù)負責處理磁力計(磁傳感器)數(shù)據(jù)的獲取、校準和發(fā)送。該函數(shù)的主要功能是從磁力計傳感器獲取數(shù)據(jù),進行必要的校準,然后將處理后的數(shù)據(jù)傳輸給其他部分使用。具體包括以下步驟:
- 檢查傳感器是否啟用:函數(shù)首先檢查是否啟用了磁力計傳感器。如果傳感器未啟用,則函數(shù)不會執(zhí)行進一步操作。
- 獲取磁力計數(shù)據(jù):
○ 如果使用離線數(shù)據(jù)(即在調(diào)試或仿真模式下),函數(shù)會從預(yù)定義的離線數(shù)據(jù)數(shù)組中讀取磁力計數(shù)據(jù)。
○ 如果使用實時數(shù)據(jù),函數(shù)會通過調(diào)用BSP_SENSOR_MAG_GetAxes函數(shù)從實際的磁力計傳感器中讀取當前的磁力計數(shù)據(jù)。 - 執(zhí)行磁力計校準:
○ 函數(shù)檢查磁力計是否已經(jīng)校準。如果尚未校準,則會進行校準過程。
○ 將獲取的磁力計數(shù)據(jù)轉(zhuǎn)換為適當?shù)膯挝唬蕚湫瘦斎霐?shù)據(jù)。
○ 調(diào)用MotionFX_manager_MagCal_run函數(shù)運行校準算法。
○ 如果校準結(jié)果良好(校準質(zhì)量達到標準),函數(shù)會保存校準偏移值,并停止進一步的校準。 - 應(yīng)用校準偏移:將校準偏移應(yīng)用到磁力計讀數(shù)中,以補償硬件偏差和環(huán)境干擾。
- 序列化并發(fā)送數(shù)據(jù):將校準后的磁力計數(shù)據(jù)序列化,并存儲到消息結(jié)構(gòu)(Msg)中,以供系統(tǒng)其他部分使用。
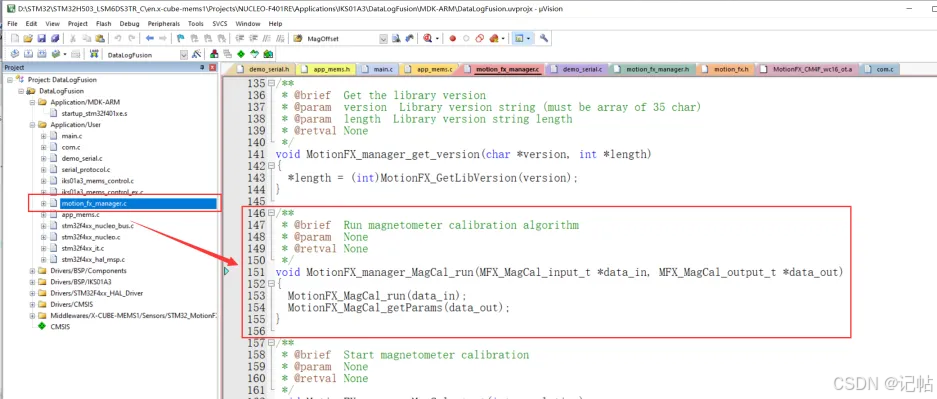
MotionFX_manager_MagCal_run函數(shù)用于運行磁力計校準算法。該函數(shù)接受磁力計輸入數(shù)據(jù),調(diào)用MotionFX庫中的校準算法對數(shù)據(jù)進行處理,并返回校準結(jié)果。
MotionFX_MagCal_run函數(shù)執(zhí)行校準算法,對輸入數(shù)據(jù)進行處理,計算出校準所需的參數(shù)。
MotionFX_MagCal_getParams函數(shù)從校準算法中獲取校準后的參數(shù),并存儲在輸出數(shù)據(jù)結(jié)構(gòu)data_out中。這些參數(shù)包括磁力計的偏移和標度因子等校準信息。
MotionFX_MagCal_getParams
MotionFX_MagCal_getParams函數(shù)用于獲取磁力計的校準參數(shù)。這些參數(shù)包括校準后的硬鐵偏移量和校準質(zhì)量指標。該函數(shù)通過傳入一個指向輸出數(shù)據(jù)結(jié)構(gòu)的指針,返回校準結(jié)果的詳細信息。
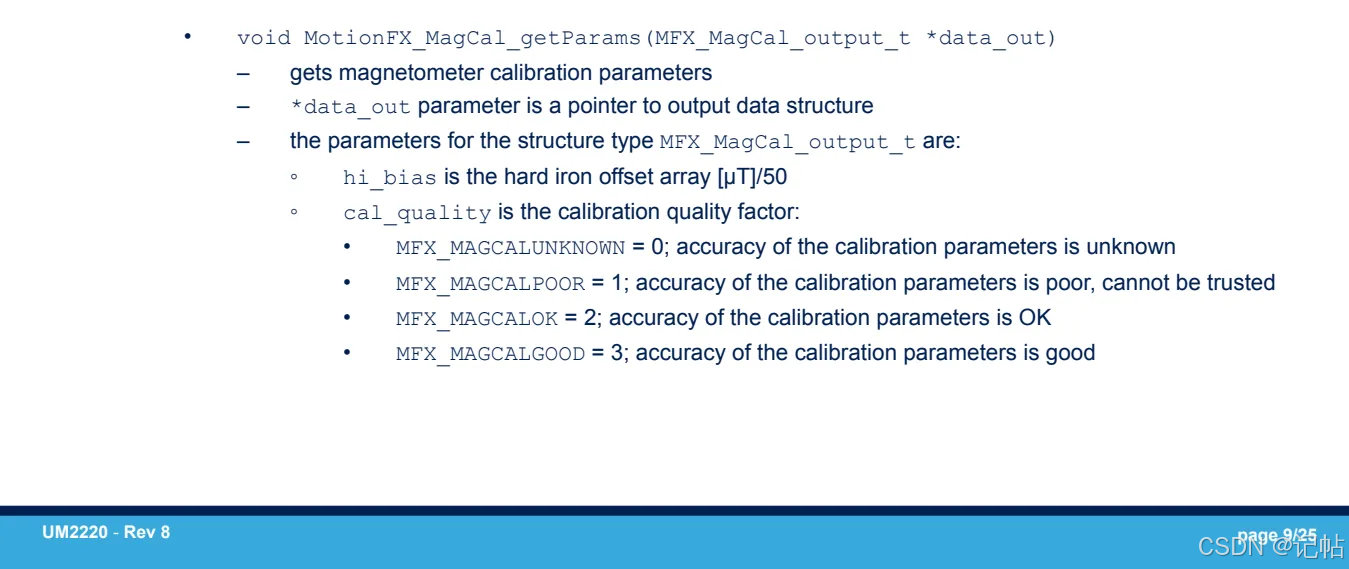
調(diào)用MotionFX_MagCal_getParams函數(shù)后,可以通過檢查data_out結(jié)構(gòu)體中的參數(shù)來評估校準結(jié)果的質(zhì)量,并應(yīng)用偏移量來調(diào)整磁力計數(shù)據(jù)。
cal_quality:校準質(zhì)量因子,指示校準結(jié)果的準確性。具體值包括:
MFX_MAGCALUNKNOWN = 0:校準參數(shù)的準確性未知。
MFX_MAGCALPOOR = 1:校準參數(shù)的準確性較差,不能被信任。
MFX_MAGCALOK = 2:校準參數(shù)的準確性尚可。
MFX_MAGCALGOOD = 3:校準參數(shù)的準確性良好。
校準移植
在main.c中添加變量定義。
/* USER CODE BEGIN 0 */
float MagOffset[3]={0.0f,0.0f,0.0f};//磁力計偏差
int Mag_TimeStamp,Mag_TimeStamp_1,Mag_TimeStamp_2;//磁力計時間戳
uint8_t Mag_flag=0;
/* USER CODE END 0 */
磁力計數(shù)據(jù)官方文檔推薦20/40HZ。
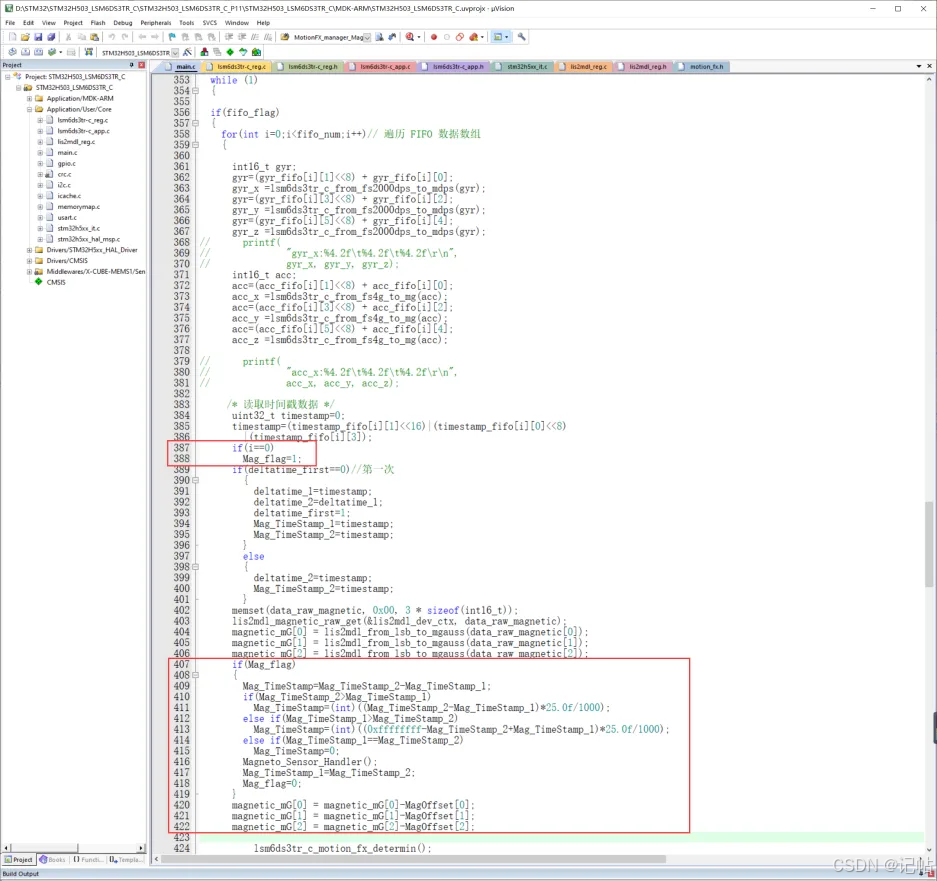
在mian.c中添加磁力計校準執(zhí)行函數(shù)這里陀螺儀數(shù)據(jù)為416Hz,單次循環(huán)執(zhí)行10次,所以讓磁力計在單次循環(huán)中只執(zhí)行一次,頻率則為40Hz左右。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(fifo_flag)
{
for(int i=0;i< fifo_num;i++)// 遍歷 FIFO 數(shù)據(jù)數(shù)組
{
int16_t gyr;
gyr=(gyr_fifo[i][1]<
gyr_x =lsm6ds3tr_c_from_fs2000dps_to_mdps(gyr);
gyr=(gyr_fifo[i][3]<
gyr_y =lsm6ds3tr_c_from_fs2000dps_to_mdps(gyr);
gyr=(gyr_fifo[i][5]<
gyr_z =lsm6ds3tr_c_from_fs2000dps_to_mdps(gyr);
// printf(
// "gyr_x:%4.2ft%4.2ft%4.2frn",
// gyr_x, gyr_y, gyr_z);
int16_t acc;
acc=(acc_fifo[i][1]<
acc_x =lsm6ds3tr_c_from_fs4g_to_mg(acc);
acc=(acc_fifo[i][3]<
acc_y =lsm6ds3tr_c_from_fs4g_to_mg(acc);
acc=(acc_fifo[i][5]<
acc_z =lsm6ds3tr_c_from_fs4g_to_mg(acc);
// printf(
// "acc_x:%4.2ft%4.2ft%4.2frn",
// acc_x, acc_y, acc_z);
/* 讀取時間戳數(shù)據(jù) */
uint32_t timestamp=0;
timestamp=(timestamp_fifo[i][1]<
|(timestamp_fifo[i][3]);
if(i==0)
Mag_flag=1;
if(deltatime_first==0)//第一次
{
deltatime_1=timestamp;
deltatime_2=deltatime_1;
deltatime_first=1;
Mag_TimeStamp_1=timestamp;
Mag_TimeStamp_2=timestamp;
}
else
{
deltatime_2=timestamp;
Mag_TimeStamp_2=timestamp;
}
memset(data_raw_magnetic, 0x00, 3 * sizeof(int16_t));
lis2mdl_magnetic_raw_get(&lis2mdl_dev_ctx, data_raw_magnetic);
magnetic_mG[0] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[0]);
magnetic_mG[1] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[1]);
magnetic_mG[2] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[2]);
if(Mag_flag)
{
Mag_TimeStamp=Mag_TimeStamp_2-Mag_TimeStamp_1;
if(Mag_TimeStamp_2 >Mag_TimeStamp_1)
Mag_TimeStamp=(int)((Mag_TimeStamp_2-Mag_TimeStamp_1)*25.0f/1000);
else if(Mag_TimeStamp_1 >Mag_TimeStamp_2)
Mag_TimeStamp=(int)((0xffffffff-Mag_TimeStamp_2+Mag_TimeStamp_1)*25.0f/1000);
else if(Mag_TimeStamp_1==Mag_TimeStamp_2)
Mag_TimeStamp=0;
Magneto_Sensor_Handler();
Mag_TimeStamp_1=Mag_TimeStamp_2;
Mag_flag=0;
}
magnetic_mG[0] = magnetic_mG[0]-MagOffset[0];
magnetic_mG[1] = magnetic_mG[1]-MagOffset[1];
magnetic_mG[2] = magnetic_mG[2]-MagOffset[2];
lsm6ds3tr_c_motion_fx_determin();
deltatime_1=deltatime_2;
}
fifo_flag=0;
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
在app.h中添加磁力計校準函數(shù)定義。
#define FROM_UT50_TO_MGAUSS 500.0f
void Magneto_Sensor_Handler(void);
在app.c中添加磁力計校準函數(shù)。
typedef struct
{
uint8_t hours;
uint8_t minutes;
uint8_t seconds;
uint8_t subsec;
float pressure;
float humidity;
float temperature;
int32_t acceleration_x_mg;
int32_t acceleration_y_mg;
int32_t acceleration_z_mg;
int32_t angular_rate_x_mdps;
int32_t angular_rate_y_mdps;
int32_t angular_rate_z_mdps;
int32_t magnetic_field_x_mgauss;
int32_t magnetic_field_y_mgauss;
int32_t magnetic_field_z_mgauss;
} offline_data_t;
#define OFFLINE_DATA_SIZE 8
uint8_t UseOfflineData = 0;
uint8_t MagCalStatus = 0;
offline_data_t OfflineData[OFFLINE_DATA_SIZE];
extern float MagOffset[3];
extern float magnetic_mG[3];
extern int Mag_TimeStamp;
/**
* @brief Handles the MAG axes data getting/sending
* @param Msg the MAG part of the stream
* @retval None
*/
void Magneto_Sensor_Handler(void)
{
float ans_float;
MFX_MagCal_input_t mag_data_in;
MFX_MagCal_output_t mag_data_out;
mag_data_in.mag[0] = (float)magnetic_mG[0] * FROM_MGAUSS_TO_UT50;
mag_data_in.mag[1] = (float)magnetic_mG[1] * FROM_MGAUSS_TO_UT50;
mag_data_in.mag[2] = (float)magnetic_mG[2] * FROM_MGAUSS_TO_UT50;
mag_data_in.time_stamp = (int)Mag_TimeStamp;
// Mag_TimeStamp += (uint32_t)ALGO_PERIOD;
MotionFX_MagCal_run(&mag_data_in);
MotionFX_MagCal_getParams(&mag_data_out);
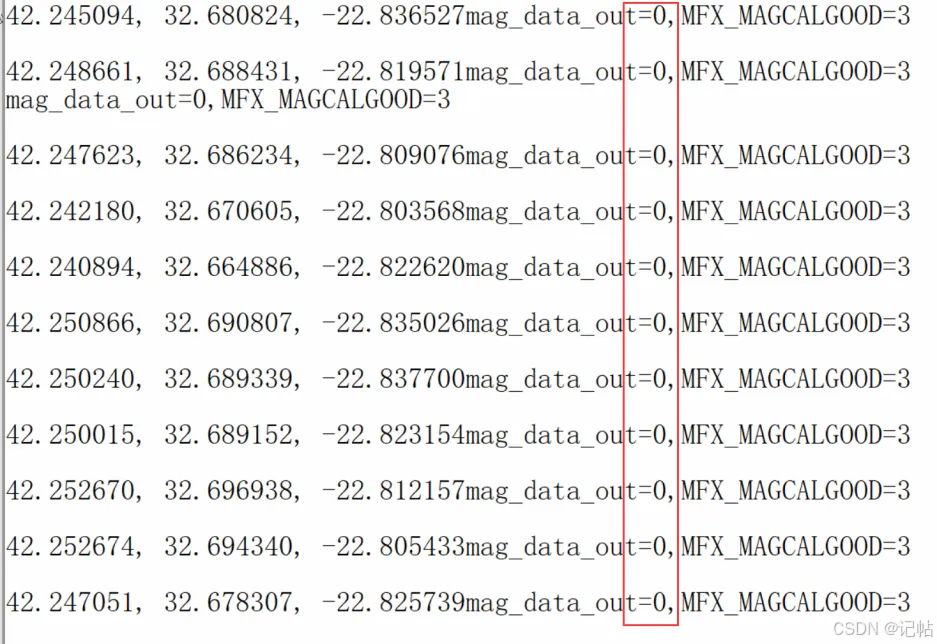
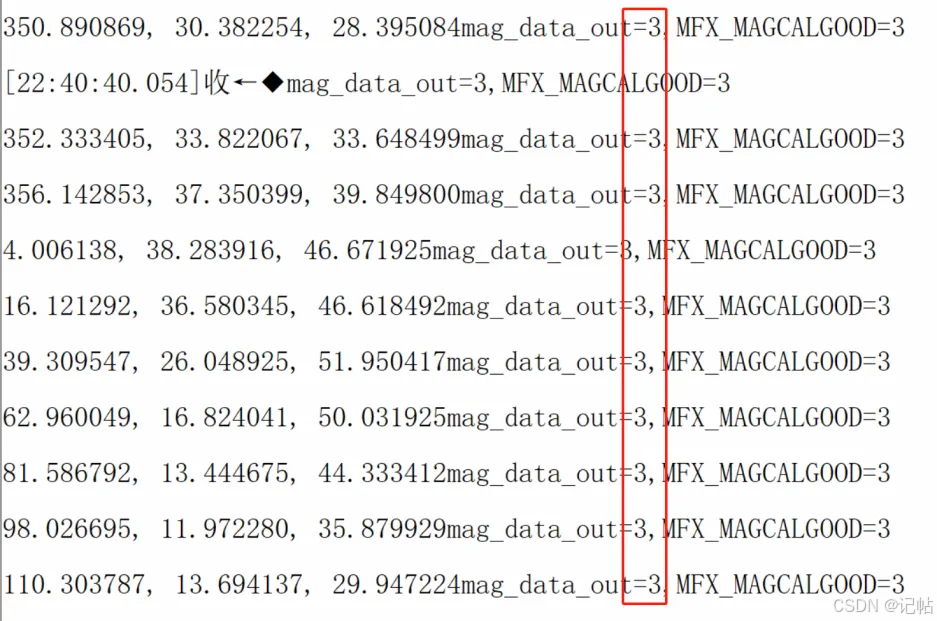
printf("mag_data_out=%d,MFX_MAGCALGOOD=%dn",mag_data_out.cal_quality,MFX_MAGCALGOOD);
if (mag_data_out.cal_quality == MFX_MAGCALGOOD)
{
// MagCalStatus = 1;
ans_float = (mag_data_out.hi_bias[0] * FROM_UT50_TO_MGAUSS);
MagOffset[0] = (int32_t)ans_float;
ans_float = (mag_data_out.hi_bias[1] * FROM_UT50_TO_MGAUSS);
MagOffset[1] = (int32_t)ans_float;
ans_float = (mag_data_out.hi_bias[2] * FROM_UT50_TO_MGAUSS);
MagOffset[2] = (int32_t)ans_float;
// /* Disable magnetometer calibration */
// MotionFX_manager_MagCal_stop(ALGO_PERIOD);
}
}
演示
未校準成功時未0。
校準成功時為3。
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752137 -
驅(qū)動
+關(guān)注
關(guān)注
12文章
1827瀏覽量
85186 -
數(shù)據(jù)采集
+關(guān)注
關(guān)注
38文章
5925瀏覽量
113538 -
運動檢測
+關(guān)注
關(guān)注
0文章
34瀏覽量
12609
發(fā)布評論請先 登錄
相關(guān)推薦
磁力計LIS2MDL開發(fā)(4)----MotionMC 執(zhí)行磁力計校準

驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(12)----加速度校準
驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(10)----融合磁力計進行姿態(tài)解算
驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(9)----獲取磁力計數(shù)據(jù)
驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(8)----中斷獲取FIFO數(shù)據(jù)并應(yīng)用MotionFX庫解析空間坐標
驅(qū)動LSM6驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(7)----MotionFX庫解析空間坐標DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采
驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(6)----FIFO數(shù)據(jù)讀取與配置






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論