") 如何正確運行步進電機官方例程
如何正確運行步進電機官方例程
問題背景:
英飛凌官網(wǎng)有提供基于XMC1302的步進電機的demo,但是客戶根據(jù)官網(wǎng)提供的文檔介紹,不知道如何來使得步進電機正常運行。所以我們特意整理了該文檔,詳細介紹下步進電機例程的完整操作流程。
環(huán)境搭建:
1. 硬件環(huán)境
1) KIT_XMC1300_IFX9201
https://www.infineon.com/cms/en/product/evaluation-boards/kit_xmc1300_ifx9201/
2) KIT_XMC47_RELAX_5V_AD_V1
https://www.infineon.com/cms/en/product/evaluation-boards/kit_xmc47_relax_5v_ad_v1/
3)步進電機
4)PC機一臺
5) MiniUSB線一根
2. 軟件環(huán)境
1)DAVE 4.4.2或更高版本
(從英飛凌官網(wǎng)下載,下載鏈接:https://softwaretools.infineon.com/tools/com.ifx.tb.tool.daveide?_ga=2.218624848.837896391.169560901...)
2) Arduino IDE 1.8.1-windows
https://www.arduino.cc/en/software/OldSoftwareReleases

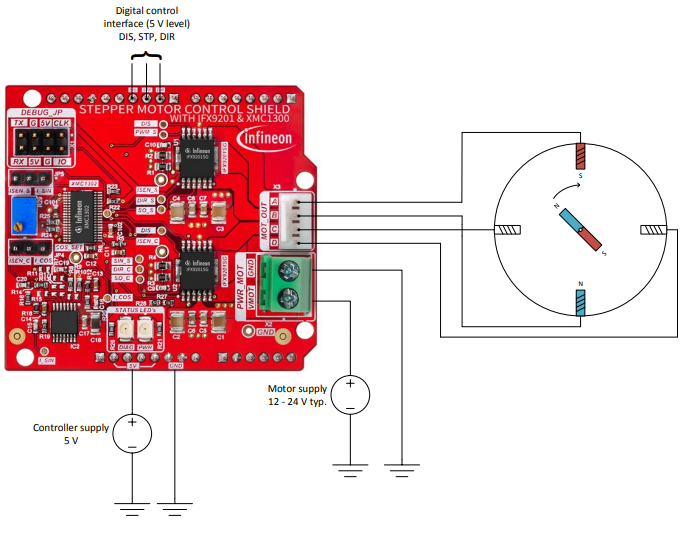
按照下圖方式來進行連接,這里的步進電機需要外部電源提供24V的供電,而控制器的5V供電,可以由KIT_XMC47_RELAX_5V_AD_V1來提供。(找元器件現(xiàn)貨上唯樣商城)
3. demo工程下載路徑
1)XMC工程
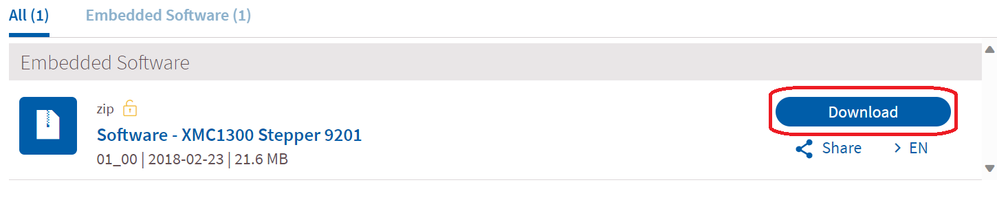
https://www.infineon.com/cms/en/product/evaluation-boards/kit_xmc1300_ifx9201/
2)Arduino程序包

https://github.com/Infineon/Stepper-Motor-Shield-IFX9201-XMC1300
該程序包含configureStepperMotor和testStepperMotor兩個主程序。
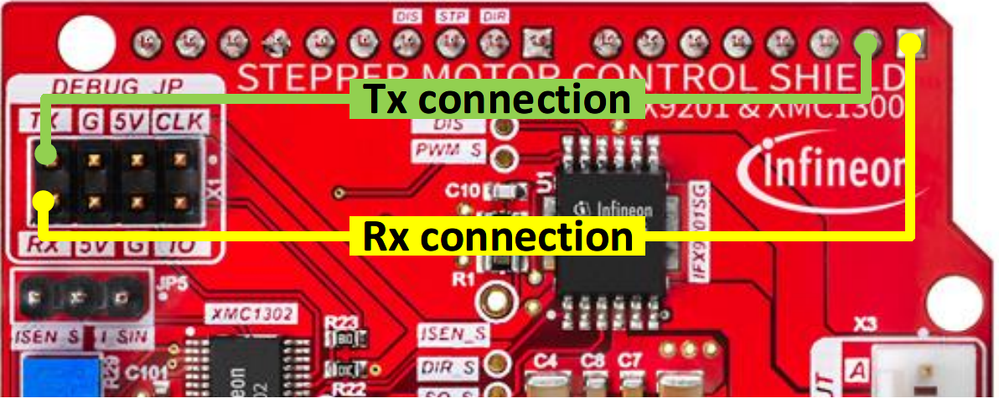
備注:該步進電機的例程,可以通過Arduino的板子來控制XMC的控制板,從而來控制步進電機進行運行。所以,在運行電機前,KIT_XMC1300_IFX9201的板子要插到KIT_XMC47_RELAX_5V_AD_V1板子上。同時,使用兩根導(dǎo)線來連接下圖所示的TX RX管腳。
運行步驟
1 Arduino相關(guān)配置設(shè)置
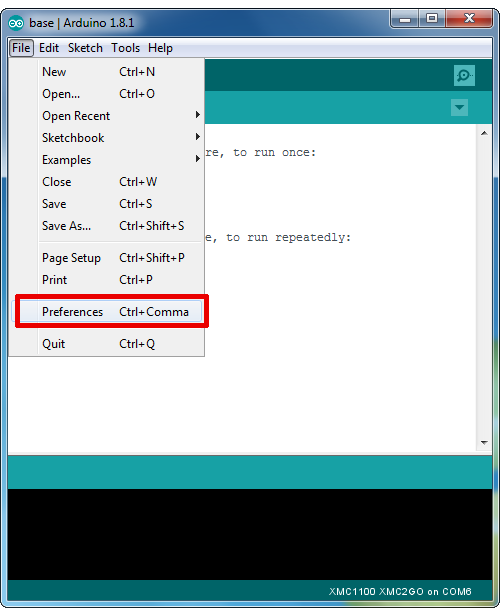
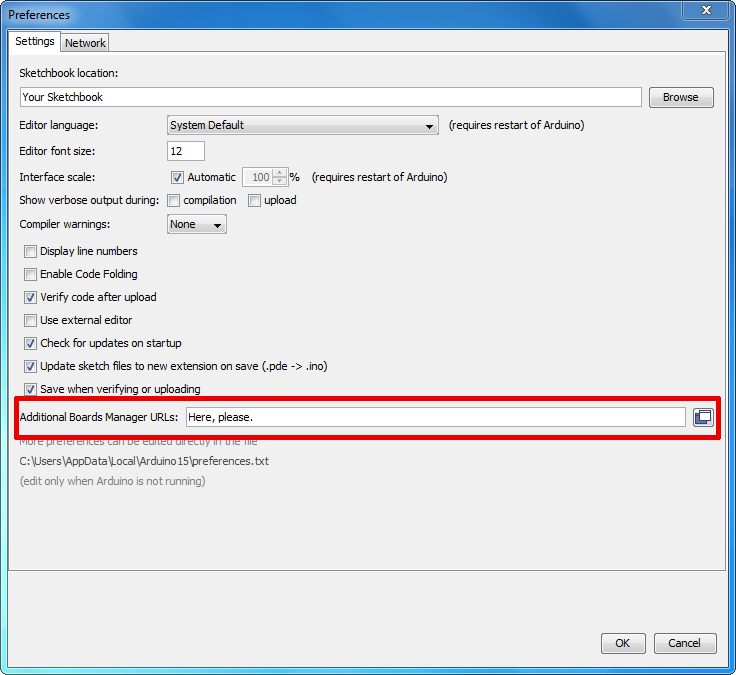
1)打開Arduino IDE,點擊”preferences”
2)復(fù)制以下鏈接到下圖紅色標記位置
https://github.com/Infineon/XMC-for-Arduino/releases/latest/download/package_infineon_index.json
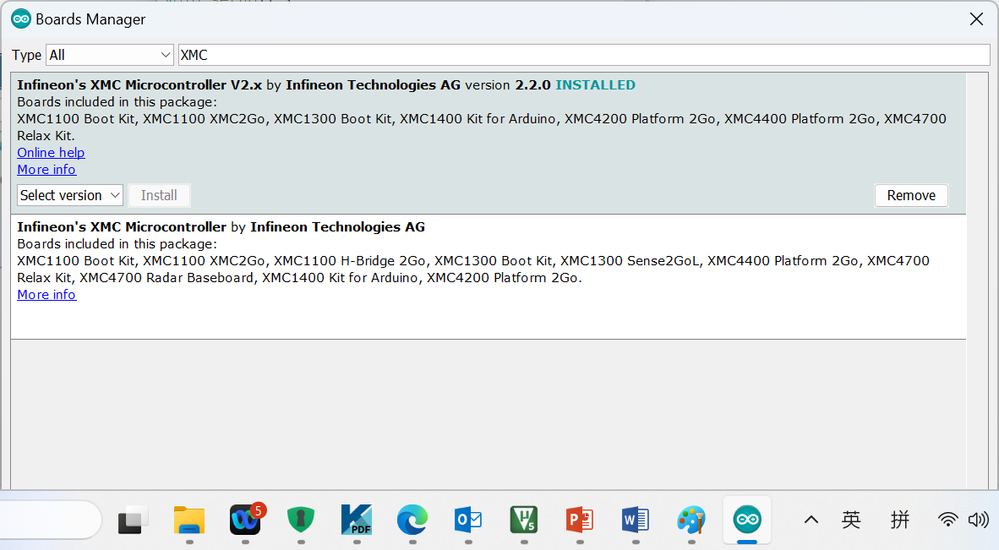
3)依次點擊Tools > Board > Boards Manager,在boards manager中搜索XMC,選擇下圖所示的board文件進行安裝。
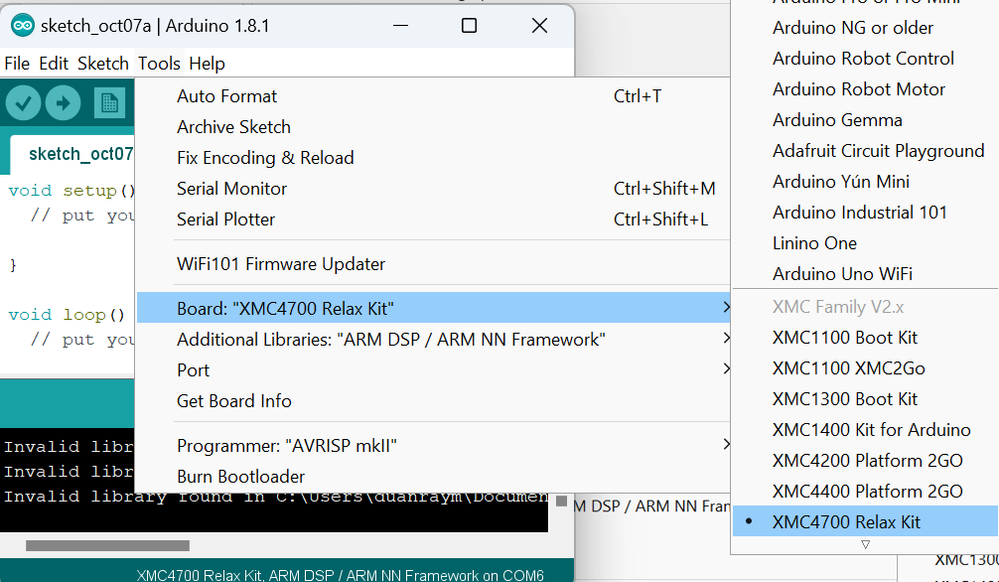
4)點擊點擊Tools > Board >XMC4700 Relax Kit
2 通過Arduino程序包來控制步進電機
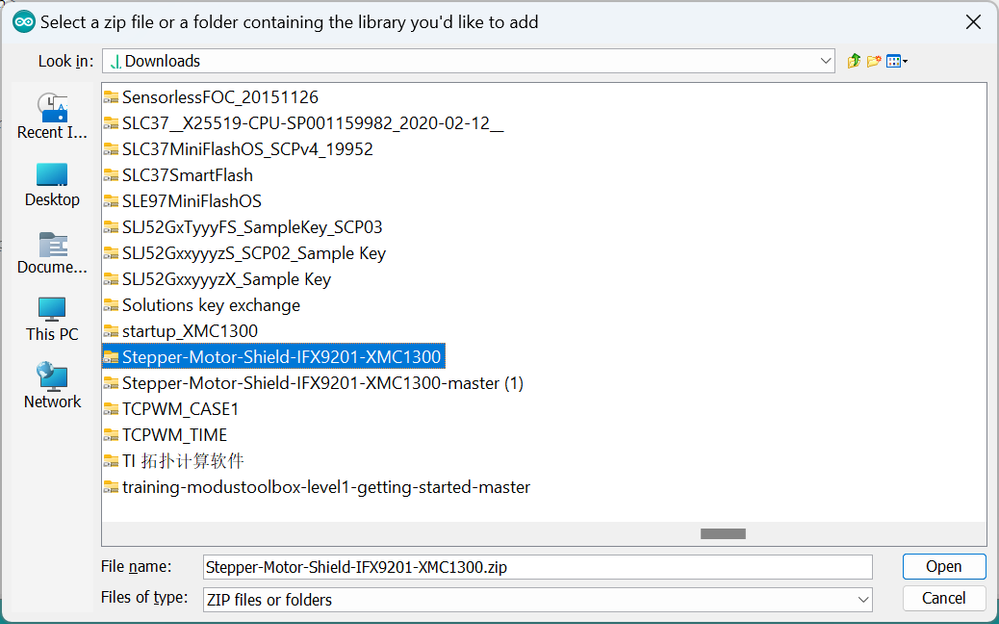
1) 安裝庫, 依次點擊Sketch > Include Library > Add .ZIP Library...
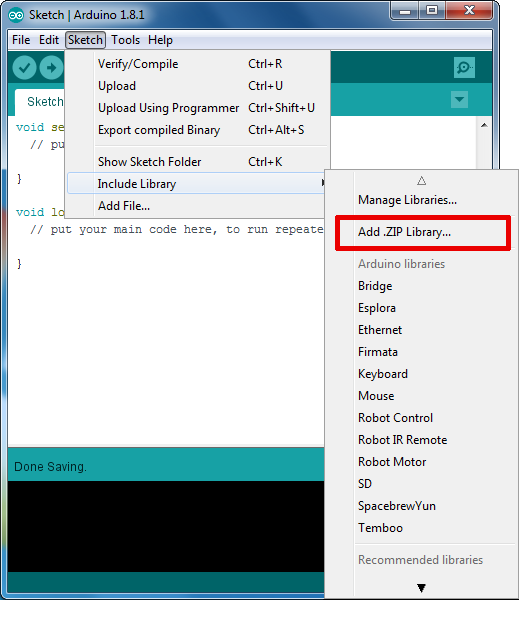
選擇剛從github上下載的Arduino的程序包
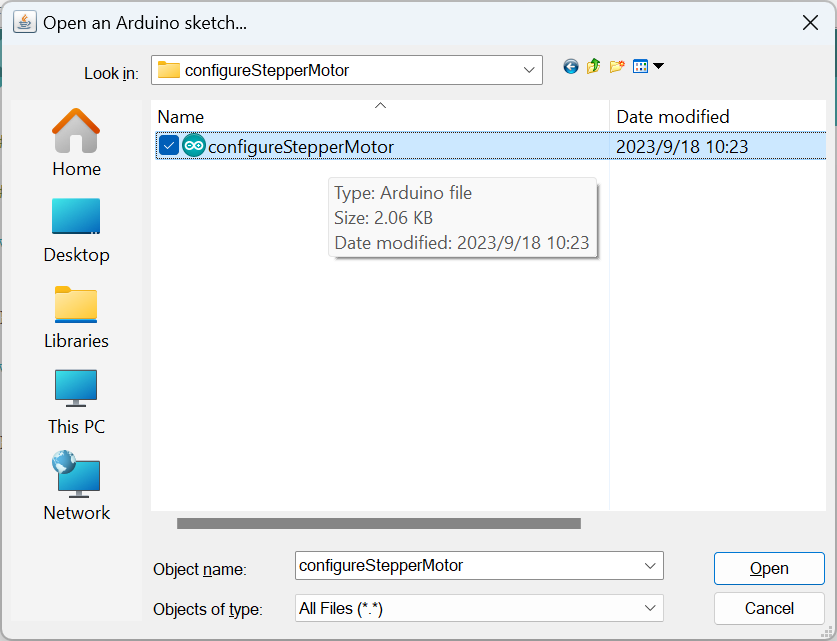
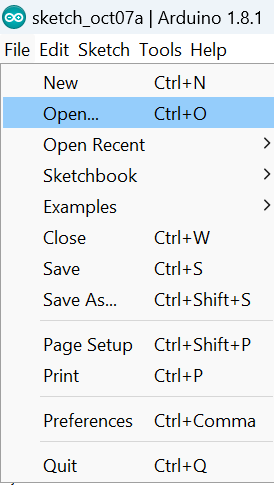
2) 加載 configureStepperMotor程序, 依次點擊File > Open
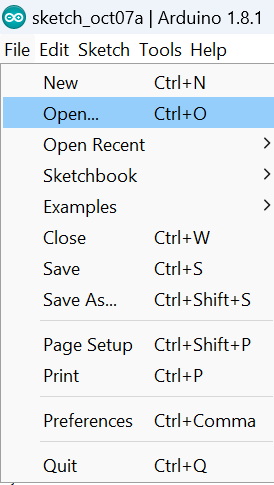
選擇configureStepperMotor
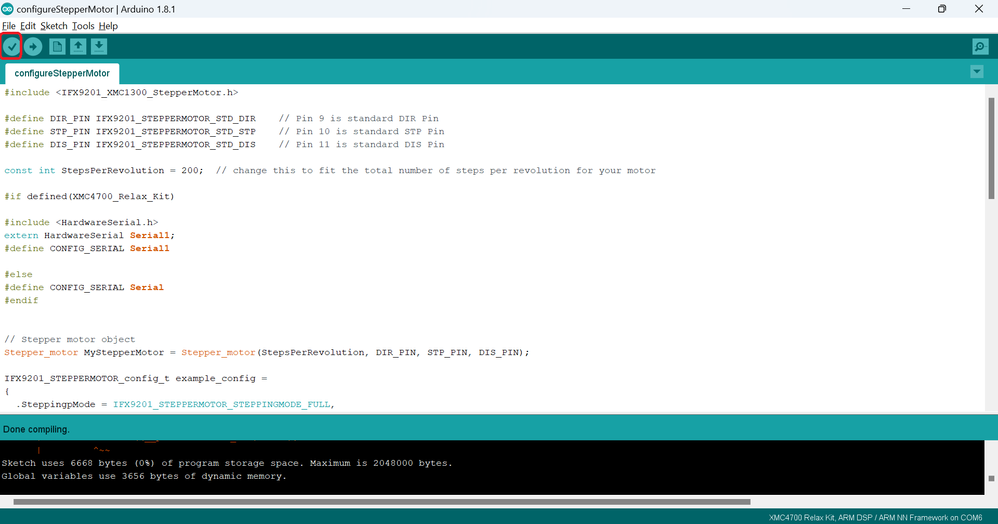
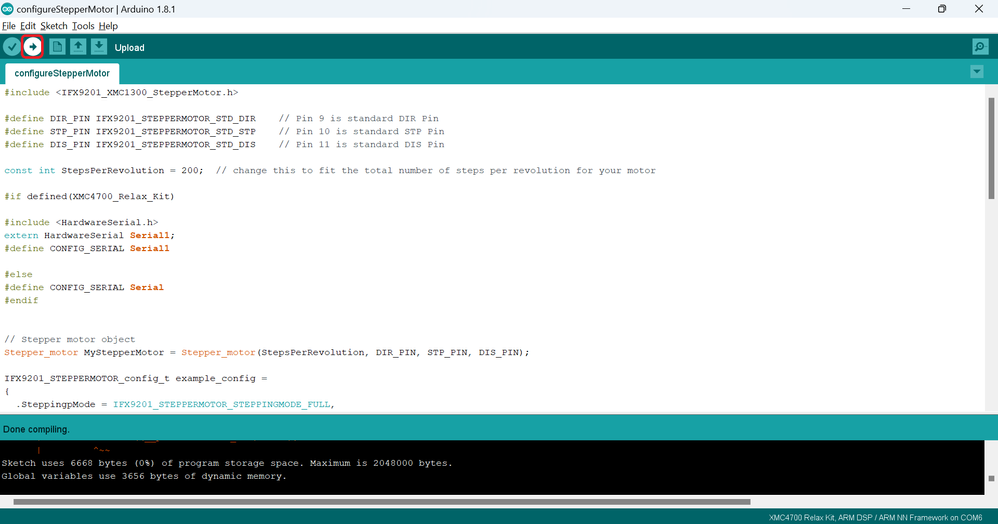
3)點擊紅色標記的”verify”按鈕,進行工程編譯。
4)點擊紅色標記的”upload”,完成對配置設(shè)置
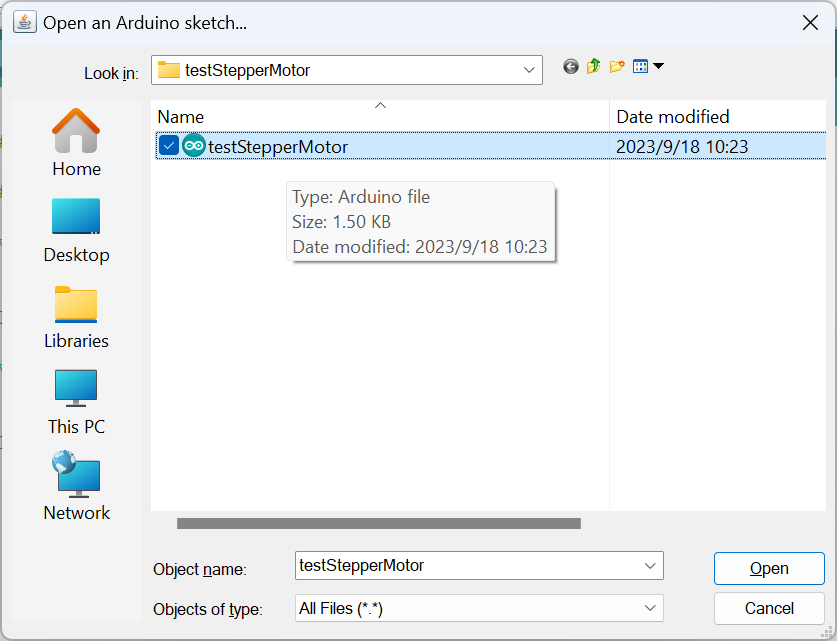
5)加載testStepperMotor程序, 依次點擊File > Open
選擇testStepperMotor
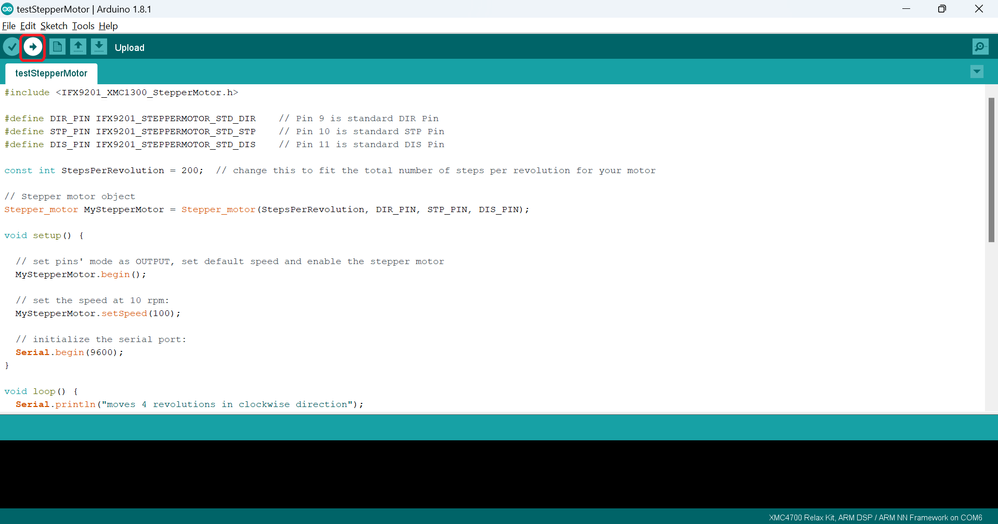
6)點擊紅色標記的”verify”按鈕,進行工程編譯。
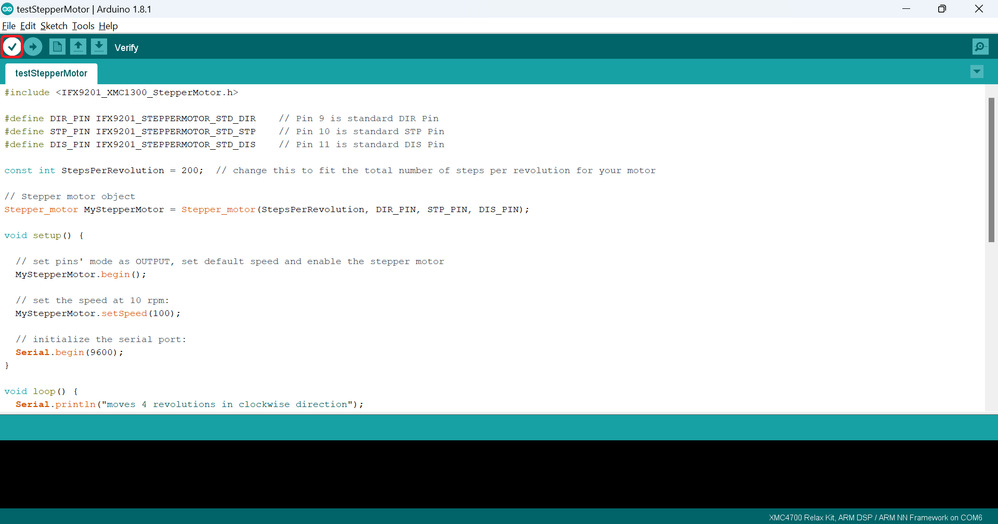
7)點擊紅色標記的”upload”,開始對步進電機的測試。可以觀察到步進電機按照程序的步驟,進行運動。
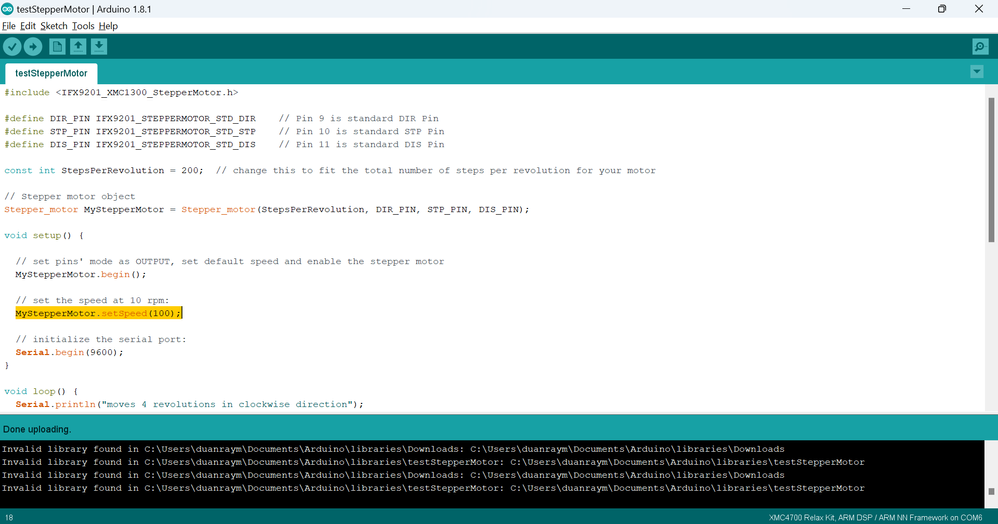
8)通過修改下面黃色標記的部分,來修改步進電機的轉(zhuǎn)速。
備注:步進電機的轉(zhuǎn)動實際上都是根據(jù)驅(qū)動器和電機相互匹配的,例如電機轉(zhuǎn)動步進角所需電流大小,驅(qū)動器在接收脈沖間隔時是否可以滿足該電流以及步進換向的速度。如果脈沖過高導(dǎo)致驅(qū)動板切換AB相電流速度過快,對應(yīng)的步進電機無法做到轉(zhuǎn)動,那么就叫丟步了,表現(xiàn)上可能就是不轉(zhuǎn)或者速度降低。
如果轉(zhuǎn)速是10 轉(zhuǎn)/秒,也就是600轉(zhuǎn)/分鐘,控制脈沖頻率是4KHz,那么該電機的步數(shù)就是400步/圈,那么步距角就是0.9°。
審核編輯 黃宇
-
英飛凌
+關(guān)注
關(guān)注
66文章
2074瀏覽量
137622 -
步進電機
+關(guān)注
關(guān)注
150文章
3036瀏覽量
146730
發(fā)布評論請先 登錄
相關(guān)推薦
提高步進電機運行質(zhì)量的電流控制方法

迅為4412開發(fā)板、步進電機驅(qū)動和測試例程

使用ULN2003A的步進電機驅(qū)動例程





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論