") DIY高大上!用STM32單片機(jī)搞定四旋翼無(wú)人機(jī)飛控
DIY高大上!用STM32單片機(jī)搞定四旋翼無(wú)人機(jī)飛控
嘗試制作這個(gè)四旋翼飛控的過程,感觸頗多,整理了思緒之后,把重要的點(diǎn)一一記下來;
這個(gè)飛控是基于STM32,整合了MPU6050,即陀螺儀和重力加速計(jì),但沒有融合電子羅盤;
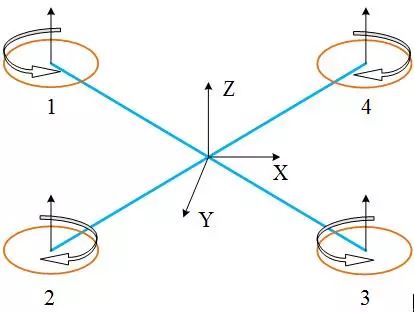
另外,四旋翼飛行器的運(yùn)動(dòng)方式請(qǐng)百度百科,不太復(fù)雜,具體不再贅述;
這是飛控程序的控制流程(一個(gè)執(zhí)行周期):

比較重要的地方:
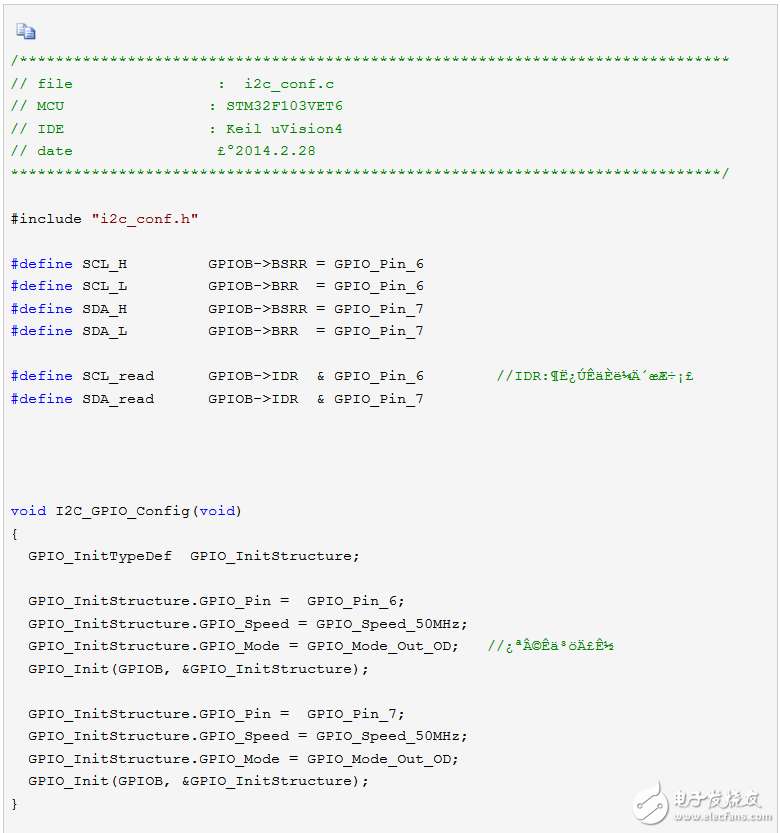
1.i2c通信方式;
因?yàn)槲也皇菍W(xué)電類專業(yè),最開始對(duì)i2c這些是沒有一點(diǎn)概念,最后通過Google了解了一些原理,然后發(fā)現(xiàn)STM32的開發(fā)庫(kù)是帶有i2c通信的相關(guān)函數(shù)的,但是我最后還是沒有用這些函數(shù)。
我通過GPIO模擬i2c,這樣也能獲得mpu6050的數(shù)據(jù),雖然代碼多了一些,但是比較好的理解i2c的原理。
STM32庫(kù)實(shí)現(xiàn)的模擬i2c代碼(注釋好像因?yàn)榫幋a問題跪了):







2.mpu6050;
然后用寫好的模擬i2c函數(shù)讀取mpu6050,根據(jù)mpu6050手冊(cè)的各寄存器地址,讀取到了重力加速計(jì)和陀螺儀的各分量;
傳感器采樣率設(shè)置為200Hz,這個(gè)值是因?yàn)槲译娬{(diào)頻率為200Hz,也就是說,我的程序循環(huán)一次0.005s,一般來說,采樣率高點(diǎn)沒問題,別比執(zhí)行一次閉環(huán)控制的周期長(zhǎng)就行了;
陀螺儀量程±2000°/s,加速計(jì)量程±2g, 量程越大,取值越不精確;
這里注意,由于我們沒有采用磁力計(jì),而陀螺儀存在零偏,所以最終在yaw方向上沒有絕對(duì)的參考系,不能建立絕對(duì)的地理坐標(biāo)系,這樣最好的結(jié)果也僅僅是在yaw上存在緩慢漂移。
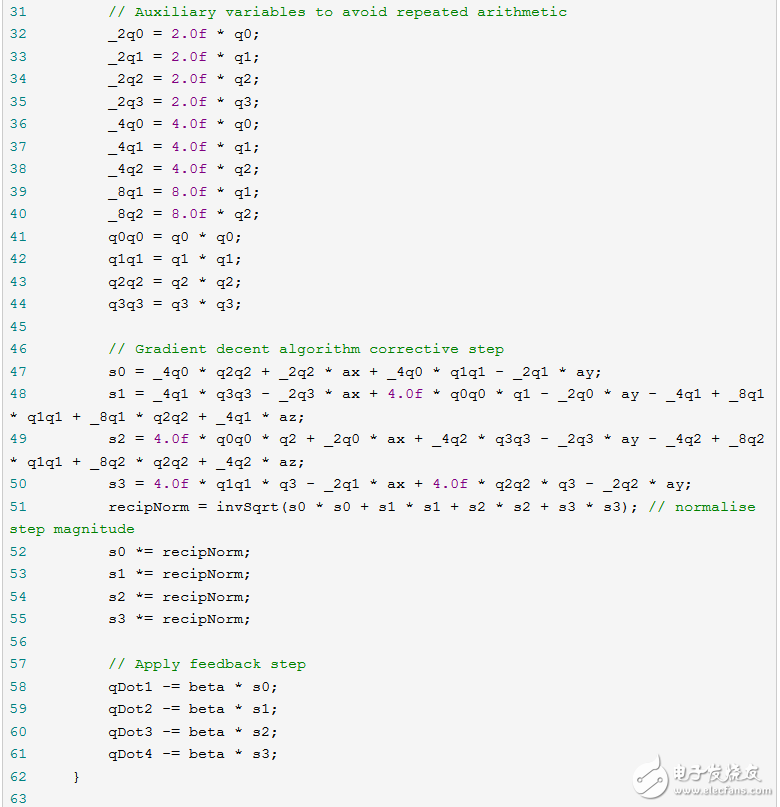
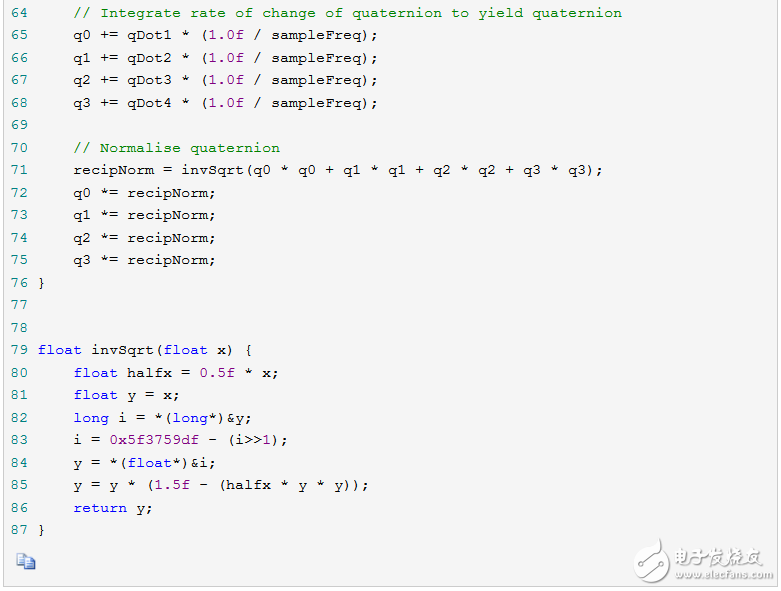
3.互補(bǔ)濾波;
融合時(shí),陀螺儀的積分運(yùn)算很大程度上決定了飛行器的瞬時(shí)運(yùn)動(dòng)情況,而重力加速計(jì)通過長(zhǎng)時(shí)間的累積不斷矯正陀螺儀產(chǎn)生的誤差,最終得到準(zhǔn)確的機(jī)體姿態(tài)。
這里我們采用Madgwick提供的UpdateIMU算法來得到姿態(tài)角所對(duì)應(yīng)的四元數(shù),之后只需要經(jīng)過簡(jiǎn)單運(yùn)算便可轉(zhuǎn)換為實(shí)時(shí)歐拉角。感謝Madgwick大大為開源做出的貢獻(xiàn)。

4.獲取期望姿態(tài);
也就是遙控部分了,讓用戶介入控制。
本著拿來主義的原則,用上”圓點(diǎn)博士開源項(xiàng)目”提供的安卓的開源藍(lán)牙控制端。
圓點(diǎn)博士給出了數(shù)據(jù)包格式,同過HC-06藍(lán)牙模塊接連到STM32串口1,再無(wú)線連接到控制端,這樣我們就可以獲得控制端不斷發(fā)送的數(shù)據(jù)包了,并實(shí)時(shí)更新期望姿態(tài)角,這里只需要注意輸出的姿態(tài)角和實(shí)時(shí)姿態(tài)角方向一致以及數(shù)據(jù)包的校驗(yàn)就行了。
5.PID控制算法;
由于簡(jiǎn)單的線性控制不可能滿足四軸飛行器這個(gè)靈敏的系統(tǒng),引入PID控制器來更好的糾正系統(tǒng)。
簡(jiǎn)介:PID實(shí)指“比例proportional”、“積分integral”、“微分derivative”,這三項(xiàng)構(gòu)成PID基本要素。每一項(xiàng)完成不同任務(wù),對(duì)系統(tǒng)功能產(chǎn)生不同的影響。

以Pitch為例:
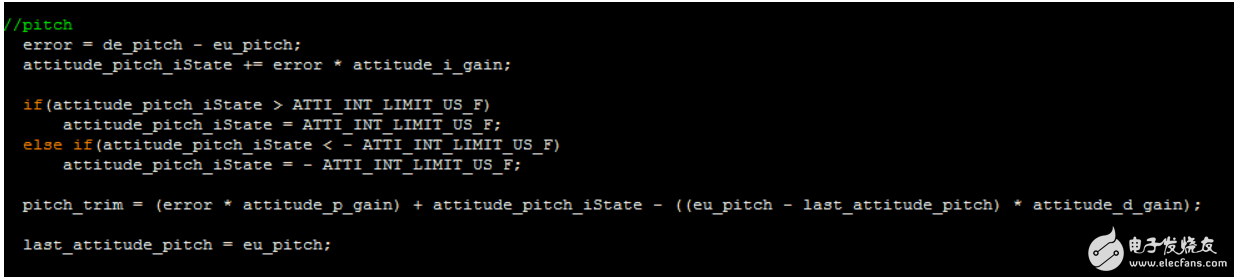
error為期望角減去實(shí)時(shí)角度得到的誤差;
iState為積分i參數(shù)對(duì)應(yīng)累積過去時(shí)間里的誤差總和;
if語(yǔ)句限定iState范圍,繁殖修正過度;
微分d參數(shù)為當(dāng)前姿態(tài)減去上次姿態(tài),估算當(dāng)前速度(瞬間速度);
總調(diào)整量為p,i,d三者之和;
這樣,P代表控制系統(tǒng)的響應(yīng)速度,越大,響應(yīng)越快。
I,用來累積過去時(shí)間內(nèi)的誤差,修正P無(wú)法達(dá)到的期望姿態(tài)值(靜差);
D,加強(qiáng)對(duì)機(jī)體變化的快速響應(yīng),對(duì)P有抑制作用。
PID各參數(shù)的整定需要綜合考慮控制系統(tǒng)的各個(gè)方面,才能達(dá)到最佳效果。
輸出PWM信號(hào):
PID計(jì)算完成之后,便可以通過STM32自帶的定時(shí)資源很容易的調(diào)制出四路pwm信號(hào),采用的電調(diào)pwm格式為50Hz,高電平持續(xù)時(shí)間0.5ms-2.5ms;
我以1.0ms-2.0ms為每個(gè)電機(jī)的油門行程,這樣,1ms的寬度均勻的對(duì)應(yīng)電調(diào)的從最低到最高轉(zhuǎn)速。
至此,一個(gè)用stm32和mpu6050搭建的飛控系統(tǒng)就算實(shí)現(xiàn)了。
-
單片機(jī)
+關(guān)注
關(guān)注
6032文章
44514瀏覽量
632956 -
STM32
+關(guān)注
關(guān)注
2266文章
10871瀏覽量
354789 -
DIY
+關(guān)注
關(guān)注
176文章
886瀏覽量
348236 -
無(wú)人機(jī)
+關(guān)注
關(guān)注
228文章
10336瀏覽量
179608 -
四旋翼
+關(guān)注
關(guān)注
8文章
60瀏覽量
28185
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
DIY了一臺(tái)無(wú)人機(jī),用全志T113芯片
為何無(wú)人機(jī)領(lǐng)域廣泛采用PX4作為核心控制平臺(tái)

開源項(xiàng)目!DIY了一臺(tái)無(wú)人機(jī),用全志T113芯片
開源項(xiàng)目!用ESP8266 DIY會(huì)爬墻的無(wú)人機(jī)
高清畫質(zhì)、低時(shí)延,圖傳技術(shù)如何展現(xiàn)FPV穿越機(jī)的“速度與激情”

第四集 知語(yǔ)云智能科技無(wú)人機(jī)反制技術(shù)與應(yīng)用--無(wú)人機(jī)的組成與工作原理
第三集 知語(yǔ)云智能科技無(wú)人機(jī)反制技術(shù)與應(yīng)用--無(wú)人機(jī)的應(yīng)用領(lǐng)域
第二集 知語(yǔ)云智能科技無(wú)人機(jī)反制技術(shù)與應(yīng)用--無(wú)人機(jī)的發(fā)展歷程
第一集 知語(yǔ)科技無(wú)人機(jī)反制技術(shù)與應(yīng)用--無(wú)人機(jī)的定義與分類
四旋翼無(wú)人機(jī)飛行原理【其利天下無(wú)人機(jī)方案開發(fā)】

基于單片機(jī)的北斗定位無(wú)人機(jī)救火系統(tǒng)設(shè)計(jì)
基于單片機(jī)的北斗定位無(wú)人機(jī)救火系統(tǒng)設(shè)計(jì)
【開源項(xiàng)目】使用 Blues Swan 3.0 制作的的 DIY 無(wú)人機(jī)
深度研究垂直起降固定翼無(wú)人機(jī)技術(shù)

四旋翼無(wú)人機(jī)的飛行原理及控制方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論