") 中科億海微伺服控制FOC解決方案
中科億海微伺服控制FOC解決方案
隨著科技的不斷進(jìn)步和應(yīng)用的不斷擴(kuò)展,電機(jī)控制技術(shù)的需求也在不斷增加,主要的電機(jī)控制需求包括高精度控制、高效率、高可靠性和智能化等。
FOC(磁場(chǎng)定向控制),也被稱作VC(矢量控制),是一種對(duì)無(wú)刷電機(jī)的驅(qū)動(dòng)控制方法,如無(wú)刷直流電機(jī)(BLDC)和永磁同步電機(jī)(PMSM)。FOC控制被廣泛用于工業(yè)自動(dòng)化、電動(dòng)汽車、無(wú)人機(jī)、生活家電等需要高性能和高精度電機(jī)控制領(lǐng)域的應(yīng)用場(chǎng)景,具有非常重要的應(yīng)用價(jià)值。
本方案是基于中科億海微自主研發(fā)的EQ6HL45_CSG324型FPGA芯片,實(shí)現(xiàn)并滿足了FOC算法的實(shí)時(shí)測(cè)量計(jì)算、電機(jī)參數(shù)的靈活配置、抵御噪聲和電磁干擾等功能,以及實(shí)現(xiàn)了電流(力矩)、速度、位置三個(gè)閉環(huán)控制,通過(guò)精確地控制磁場(chǎng)大小與方向,使得電機(jī)的運(yùn)動(dòng)轉(zhuǎn)矩平穩(wěn)、噪聲小、效率高,并且具有高速的動(dòng)態(tài)響應(yīng),可以實(shí)現(xiàn)對(duì)無(wú)刷電機(jī)進(jìn)行“像素級(jí)”控制。
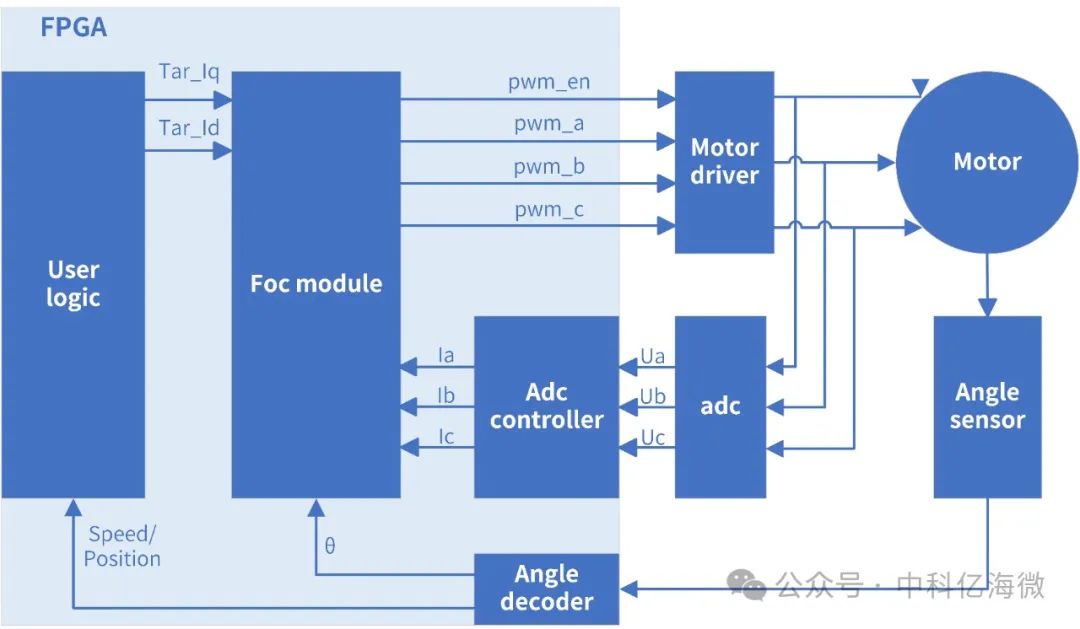
圖 伺服控制FOC系統(tǒng)架構(gòu)圖
系統(tǒng)架構(gòu)中,User logic主要是用戶邏輯代碼,并為FOC模塊提供目標(biāo)Iq、Id參數(shù);FOC module主要是提供FOC控制算法;Adc controller和Angle decoder分別采集電機(jī)的相電壓和角度數(shù)據(jù)。其他器件可根據(jù)具體情況選擇合適的器件,實(shí)現(xiàn)定制化伺服控制功能。
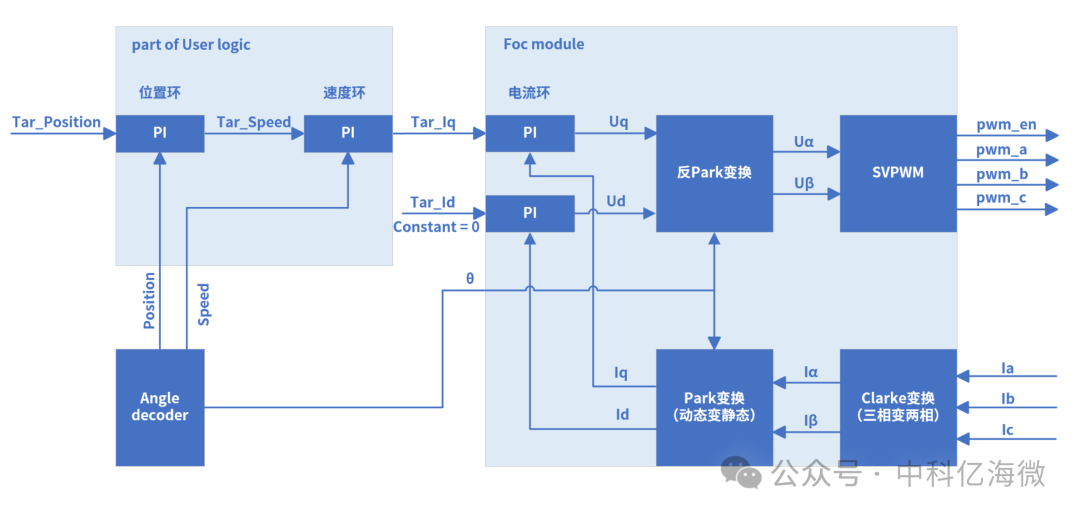
圖 伺服控制FOC軟件架構(gòu)圖
軟件架構(gòu)主要由三個(gè)PID環(huán)控制組成,包括電流環(huán)、速度環(huán)和位置環(huán),使電機(jī)的轉(zhuǎn)子位置角度與磁場(chǎng)旋轉(zhuǎn)同步,從而實(shí)現(xiàn)對(duì)電機(jī)的直接控制。電流環(huán)控制電機(jī)的轉(zhuǎn)矩,實(shí)現(xiàn)FOC的主要控制。速度環(huán)和位置環(huán)主要通過(guò)檢測(cè)電機(jī)編碼器的信號(hào)來(lái)進(jìn)行負(fù)反饋PI調(diào)節(jié),在實(shí)現(xiàn)速度和位置控制的同時(shí),協(xié)助電流環(huán)進(jìn)行電流(轉(zhuǎn)矩)的控制,達(dá)到對(duì)速度和位置的相應(yīng)控制,最終實(shí)現(xiàn)控制電機(jī)電流(扭矩)-控制電機(jī)轉(zhuǎn)速-控制電機(jī)位置的閉環(huán)控制流程。
典型應(yīng)用
電機(jī):無(wú)感/有感的BLDC/PMSM、三相/單相感應(yīng)電機(jī)、伺服電機(jī)。
工業(yè)領(lǐng)域:FOC算法常用于精確控制電機(jī)的力矩和轉(zhuǎn)速,以實(shí)現(xiàn)自動(dòng)化生產(chǎn)線的高效運(yùn)行。
電動(dòng)汽車和無(wú)人機(jī)等領(lǐng)域:FOC算法被廣泛應(yīng)用于實(shí)現(xiàn)對(duì)電機(jī)的精確控制,提高動(dòng)力系統(tǒng)的效率和性能。
生活家電領(lǐng)域:各個(gè)終端市場(chǎng)對(duì)BLDC電機(jī)控制性能提出了更高的要求,它們不僅需要電機(jī)能夠做到高效率和多功能控制,還需要電機(jī)在追求高轉(zhuǎn)速的同時(shí)實(shí)現(xiàn)低噪音低振動(dòng)的控制效果。
-
伺服控制
+關(guān)注
關(guān)注
5文章
148瀏覽量
20408 -
FOC
+關(guān)注
關(guān)注
20文章
313瀏覽量
42459 -
中科億海微
+關(guān)注
關(guān)注
0文章
67瀏覽量
1523
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【中獎(jiǎng)公示】恭喜中科億海微線上交流會(huì)中獎(jiǎng)的小伙伴,速來(lái)登記領(lǐng)獎(jiǎng)吧!~
中科億海微EQ6HL45型FPGA開(kāi)發(fā)板開(kāi)箱試用視頻
中科億海微EQ6HL45型可編程邏輯芯片開(kāi)發(fā)平臺(tái)開(kāi)箱
中科億海微與龍芯中科實(shí)現(xiàn)產(chǎn)品兼容互認(rèn)

中科億海微推出高性能FPGA加速卡系列產(chǎn)品
中科億海微受邀參加世界半導(dǎo)體大會(huì)
中科億海微與飛騰公司實(shí)現(xiàn)產(chǎn)品兼容適配認(rèn)證
中科億海微亮相ICCAD 2022
中科億海微亮相CCIG 2023 中國(guó)圖象圖形大會(huì)
CSIG企業(yè)行—走進(jìn)“科創(chuàng)中國(guó)”創(chuàng)新基地(中科億海微)成功舉辦
中科億海微亮相2023第三屆工控中國(guó)大會(huì)
中科億海微榮獲金融科技創(chuàng)新獎(jiǎng)
芯青年,新征程——中科億海微2024年度新員工培訓(xùn)順利開(kāi)班
中科億海微SoM模組——光纖陀螺控制板





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論