 基于STM32的E01和E01C驅動移植
基于STM32的E01和E01C驅動移植
實驗簡介
基于STM32F103C8T6的E01系列(nRF24L01P)和E01C系列(SI24R1)的EBYTE官網例程移植。EBYTE官網例程是基于STM8L151編寫,本次實驗的目的是將該例程移植到常見的MCU型號STM32F103C8T6,實現基本的無線通信。電腦端的串口調試助手操作和顯示數據收發。(可以稍加修改,適用于其他STM32系列的MCU)
硬件環境
? 2個E01系列的相同型號的模塊(或者2個E01C系列的相同型號的模塊)
? 2個USB轉TTL模塊(CH340版本)
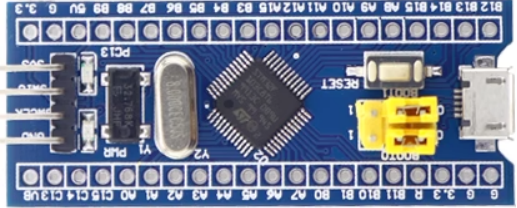
? 2個STM32F103C8T6最小系統板
? 1個STM32燒錄器(DAP-LINK或者ST-LINK等等)
? 1臺電腦
? 杜邦線若干
軟件環境
? STM32的開發軟件(MDK_ARM,IAR或者STM32CubeIDE等等)
? STM32CubeMX
? XCOM V2.6 串口調試助手
? CH340驅動
模塊簡介
視選擇型號,參考廠家提供的模塊手冊。因為E01和E01C分別使用的nRF24L01P和SI24R1射頻方案,但是寄存器基本一致,操作方式也大致相同,所以驅動程序可以通用。
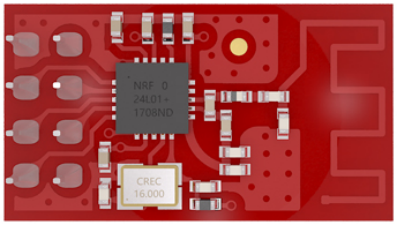
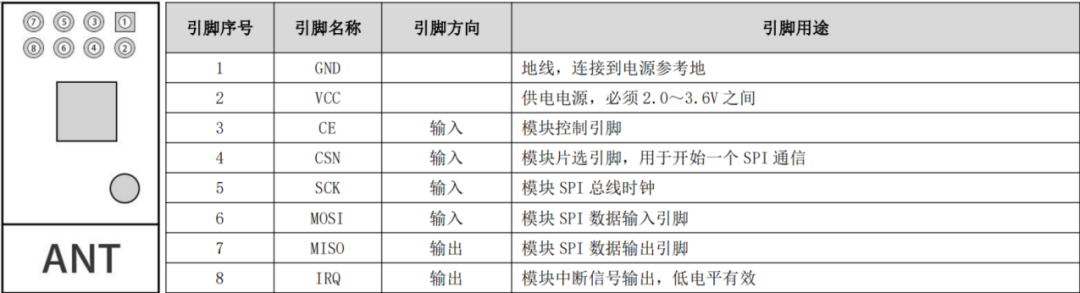
本次實驗使用E01-ML01D,基于nRF24L01P方案,3.3V供電,最大發射功率0dBm,參考通信距離100m。模塊的寄存器和詳細操作可以直接參考nRF24L01P的芯片手冊。E01-ML01D模塊示意及引腳定義如下圖。
實驗步驟
本次實驗使用的STM32開發環境是MDK_ARM和STM32CubeMX,燒錄器使用的是ST-LINK。涉及到的軟件獲取和安裝方法這里不做介紹,建議參考網上的教程。注意,如果使用的大功率E01或者E01C模塊,例如發射功率大于等于20dBm,需要考慮供電是否達到要求,本次使用的是E01-ML01D的發射電流在13mA,一般的STM32F103C8T6核心板都可以滿足要求。
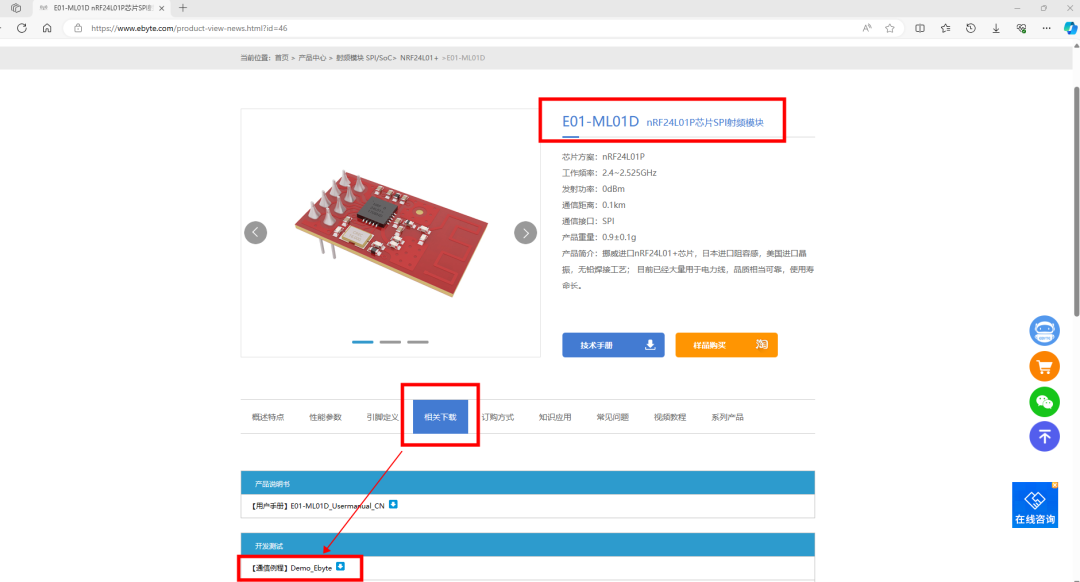
1.準備EBYTE官網例程
在億佰特官網搜索E01-ML01D,在【相關下載】一欄,找到通信例程并下載解壓。
2.新建STM32工程
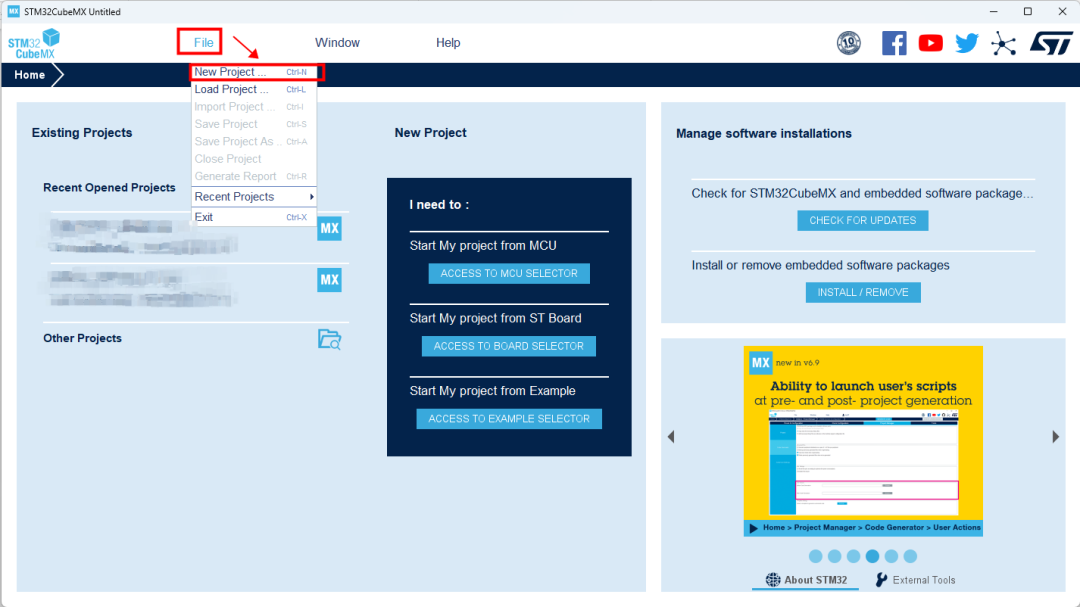
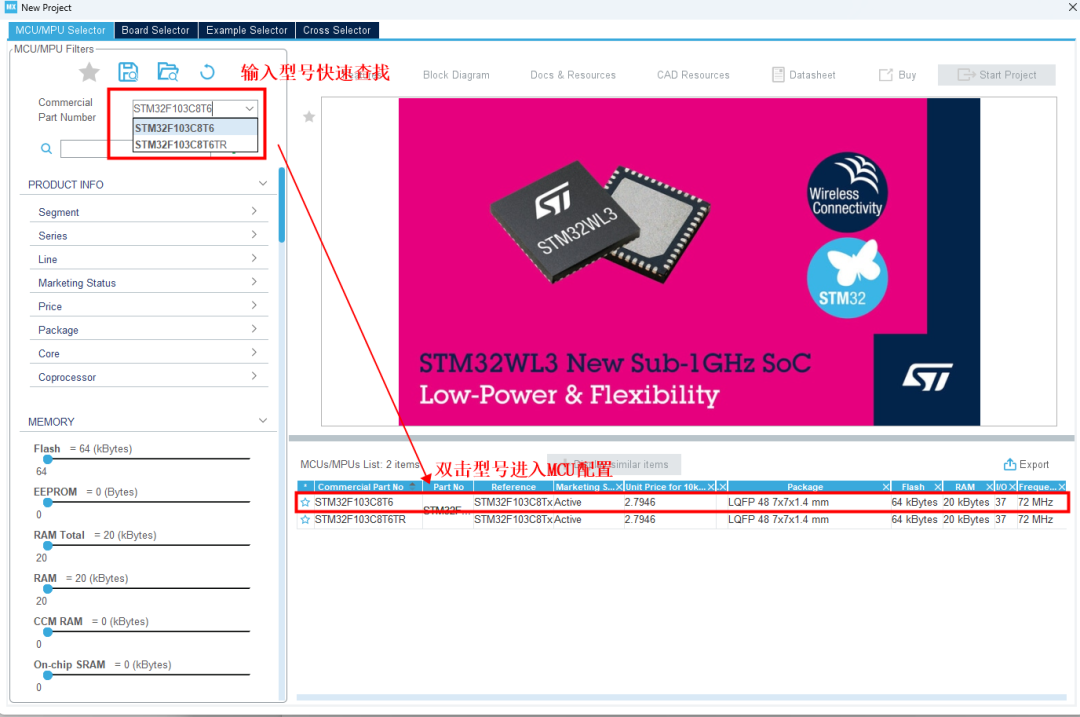
①打開STM32CubeMX,新建STM32F103C8T6工程,進入MCU配置。
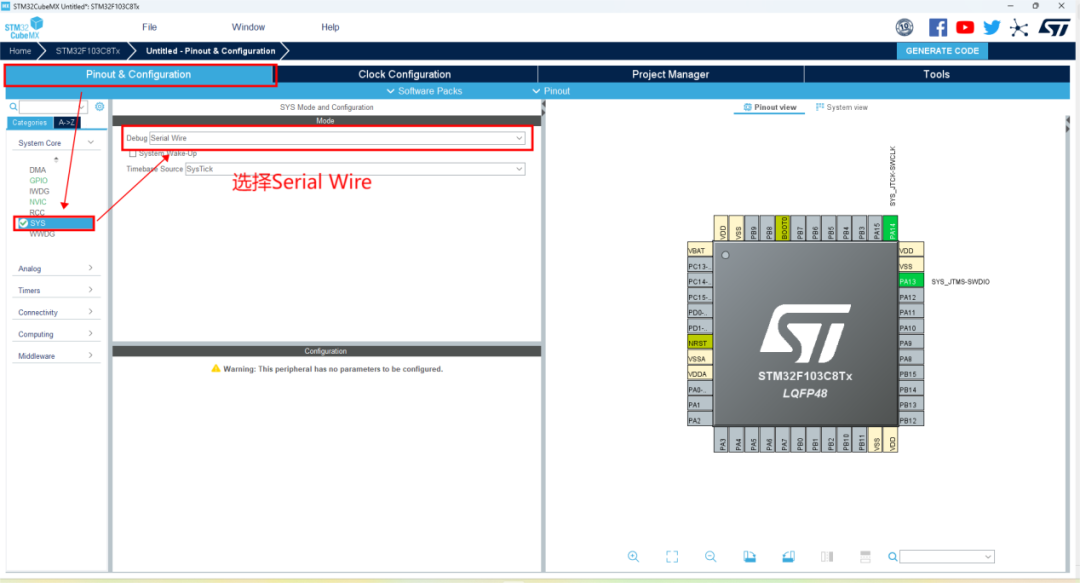
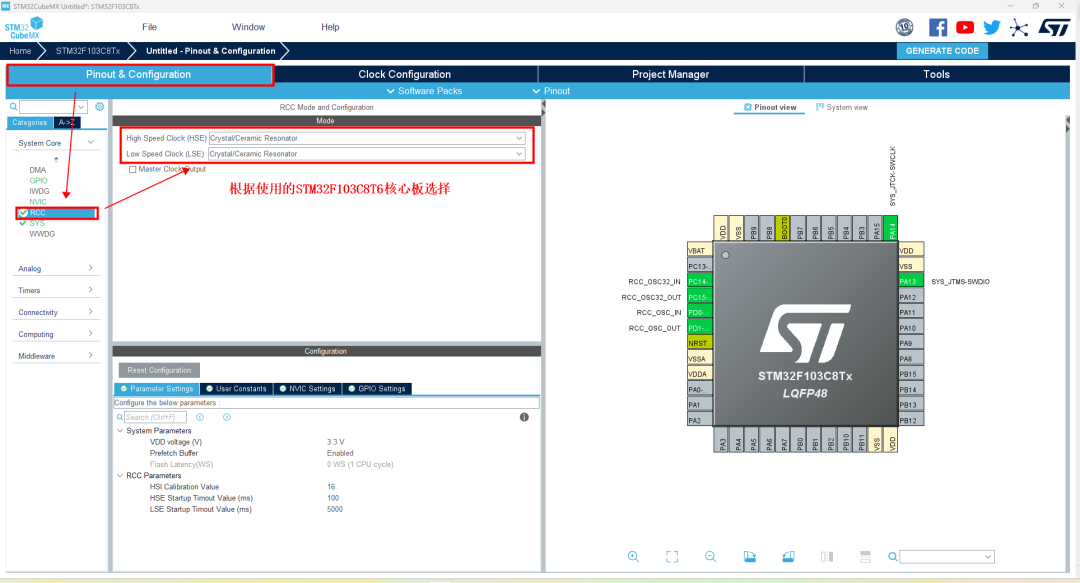
②配置System Core選項中的SYS和RCC
在Pinout & Configuration 一欄下展開System Core,分別配置SYS和RCC。
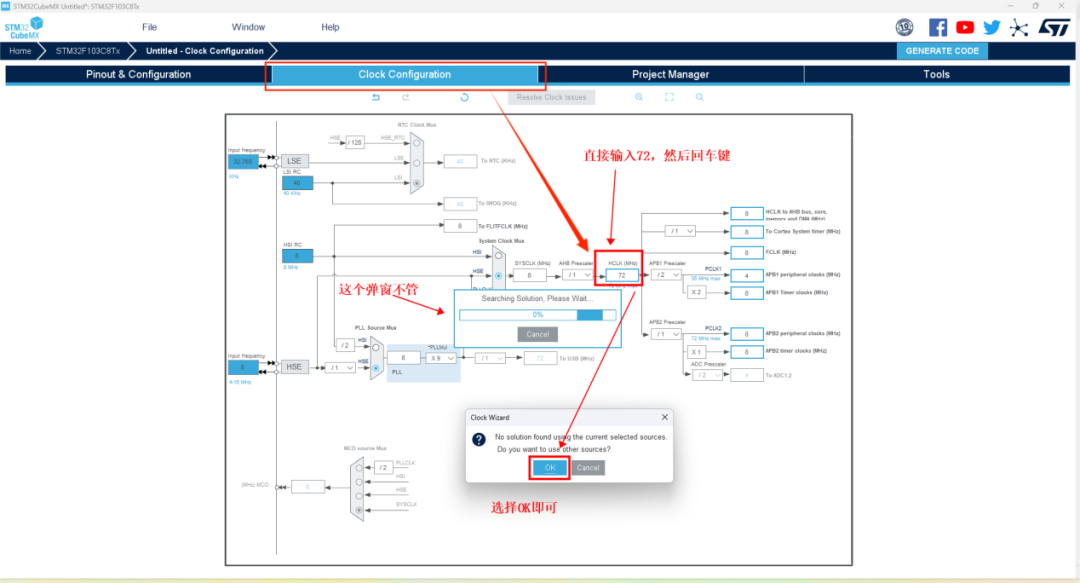
③Clock Configuration時鐘樹配置
時鐘配置完成后,回到Pinout & Configuration一欄配置其他MCU外設。
④MCU的串口配置
選擇USART1,配置USART1參數。
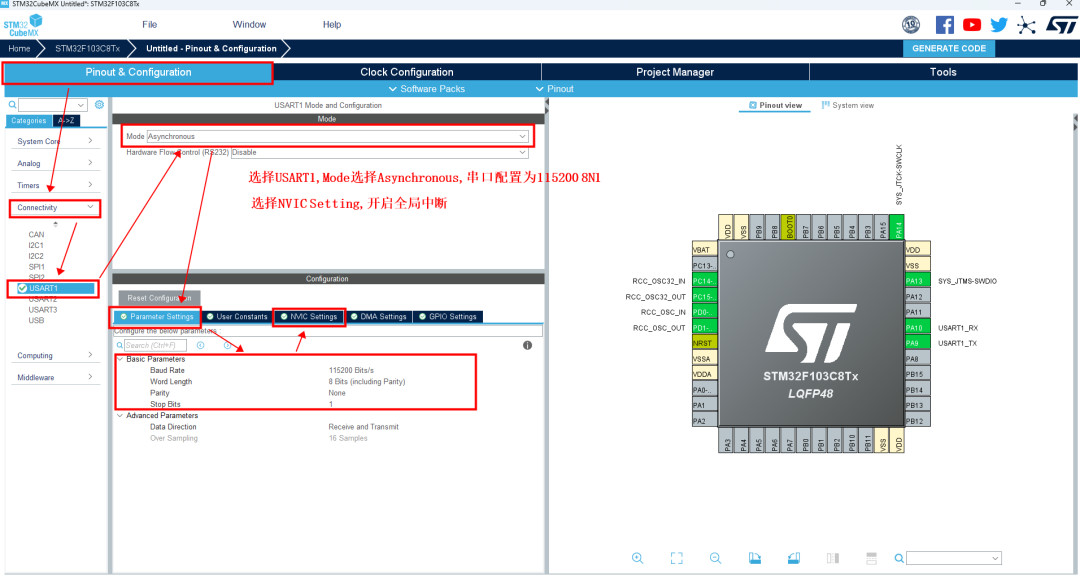
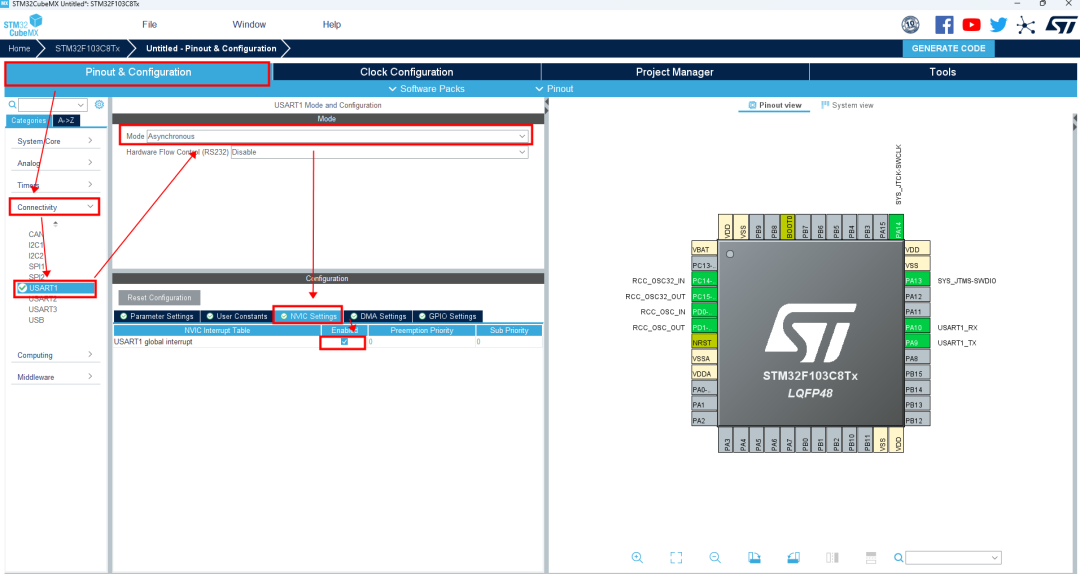
開啟USART1全局中斷。
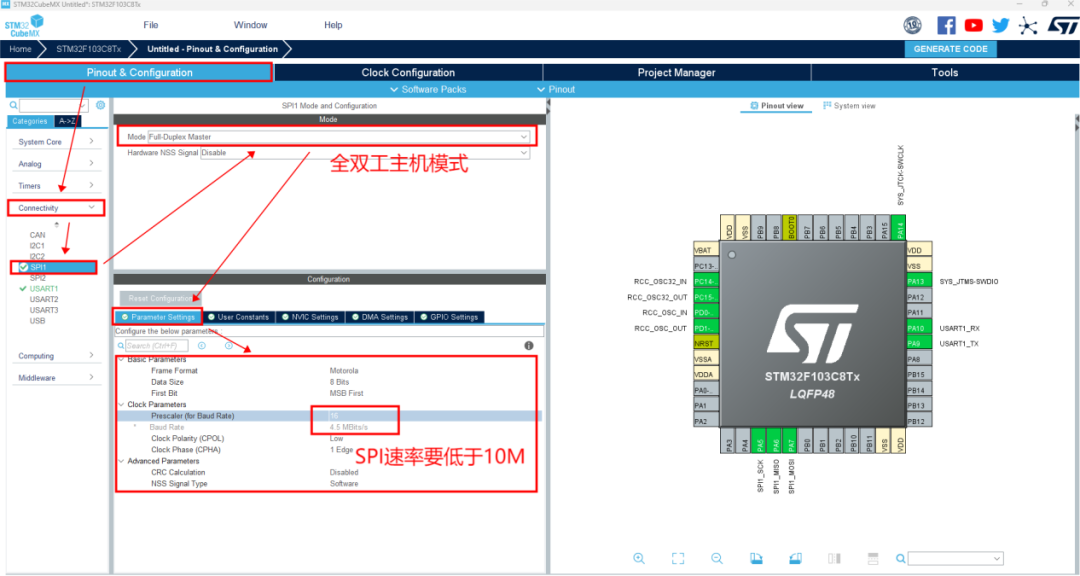
⑤配置MCU的SPI
選擇SPI1,配置為全雙工主機模式,射頻芯片的SPI速率最大支持10M,所以MCU的SPI的速率要小于等于10M,CPOL選擇Low,CPHA選擇1Edge,NSS引腳控制選擇Software。不啟用SPI1的全局中斷,所以NVIC Setting不設置。
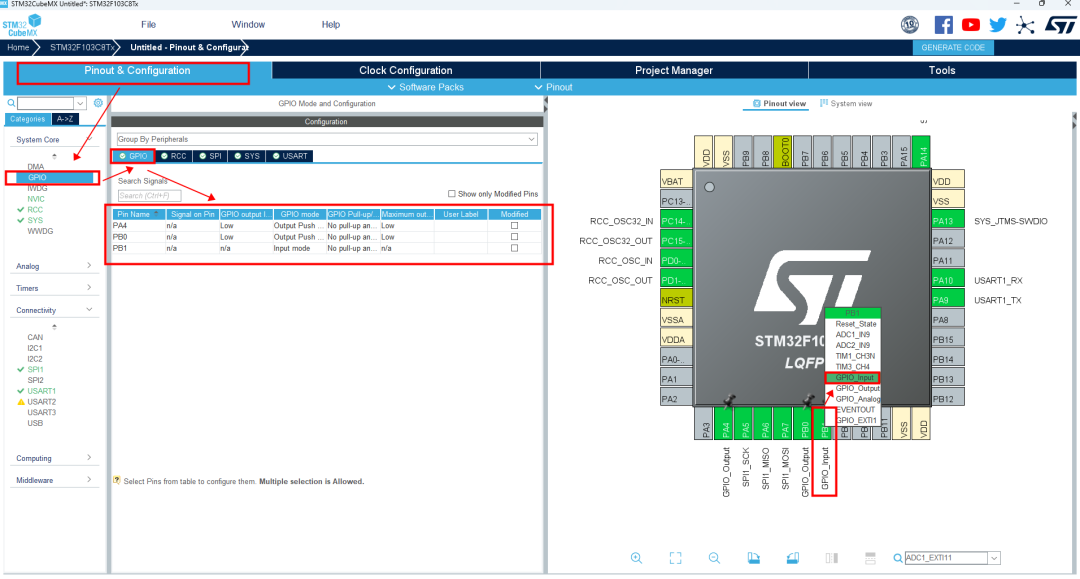
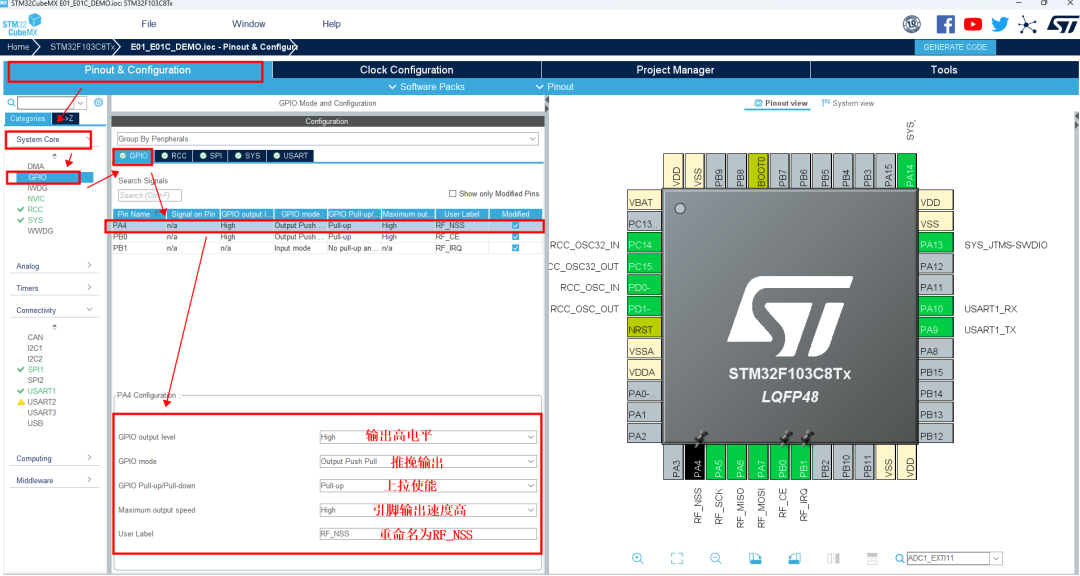
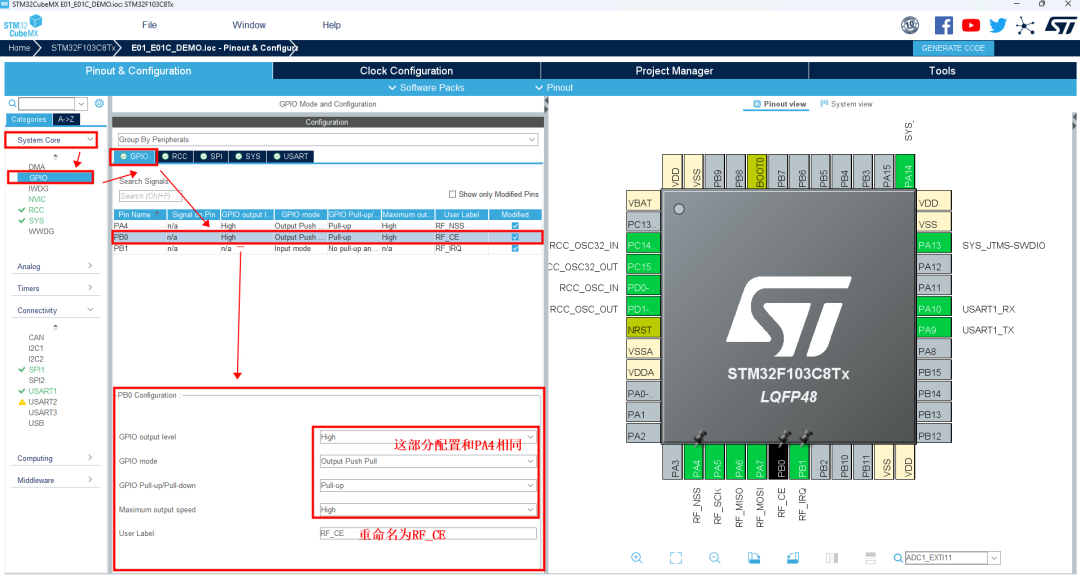
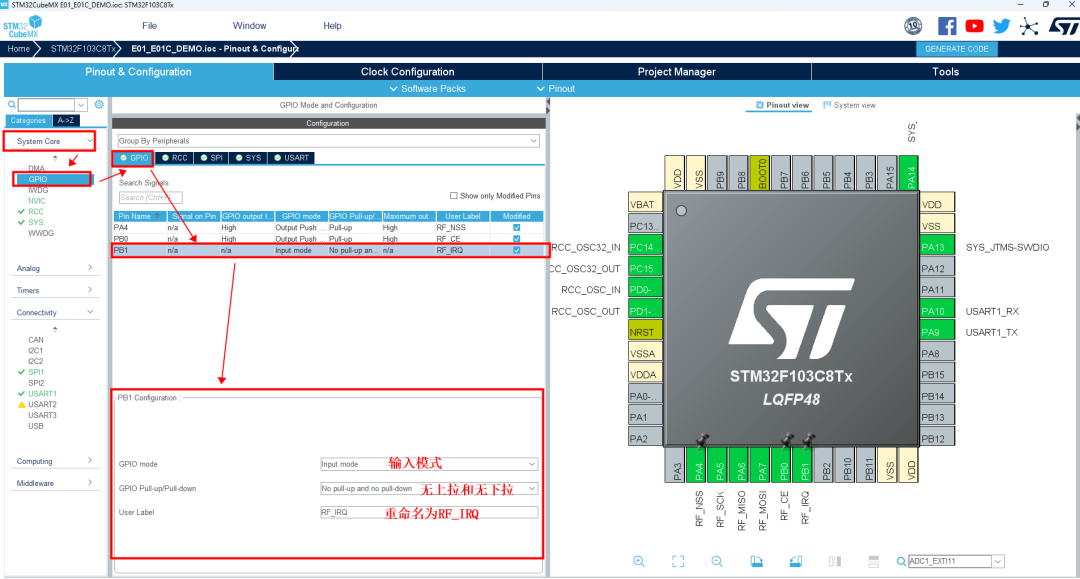
⑥GPIO配置
直接點擊MCU對應引腳,將其配置。將PA4作為SPI1的片選引腳,PB0作為E01-ML01D模塊的CE引腳,PB1作為E01-ML01D模塊的IRQ引腳。所以需要把PA4和 PB0 配置為GPIO_Output,PB1配置為GPIO_Input。配置引腳后,在GPIO選項中,會顯示配置的這三個引腳配置詳情。然后在GPIO選項中,需要配置GPIO的其他參數。
這一步完成后,我們要使用的MCU外設已經基本完成配置,接下來是工程的設置和保存。
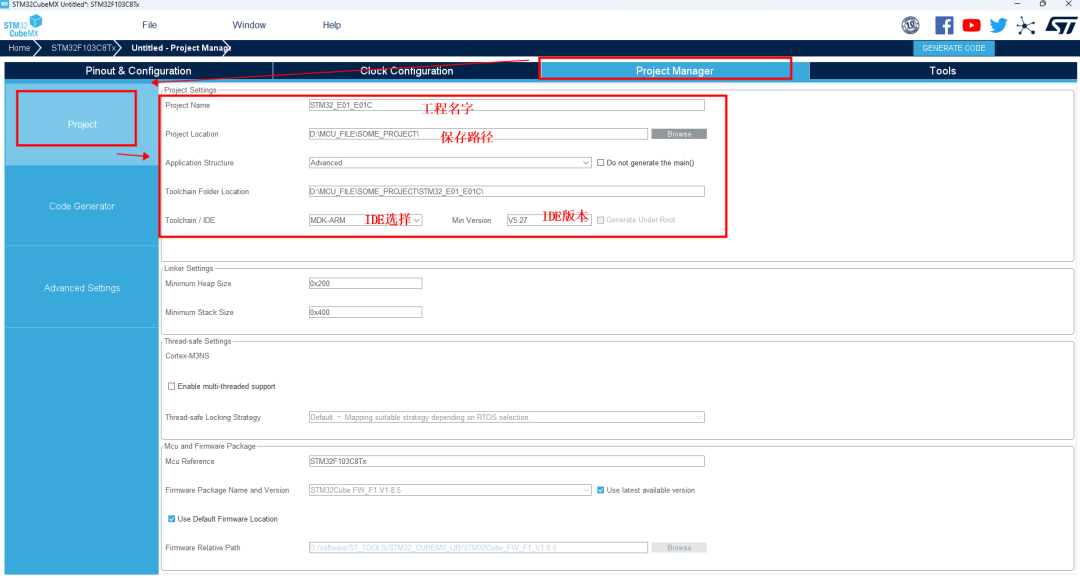
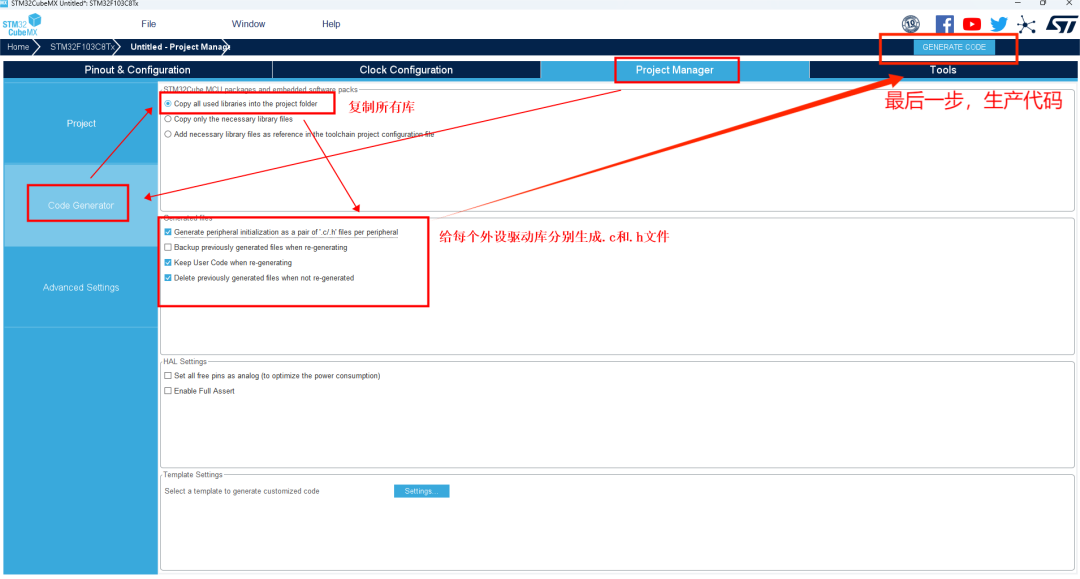
⑦設置工程以及保存路徑
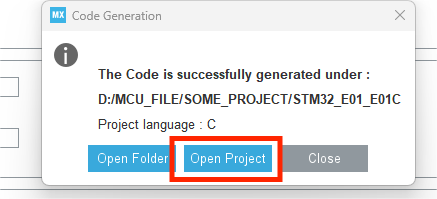
配置工程及代碼生成配置,最后點擊GENERATE CODE,等待進度條完成后會出現一個彈窗,選擇Open Project 直接打開工程。接下來就是在MDK_ARM中的操作。
3.代碼移植
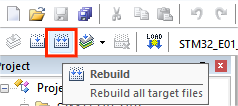
①完成上面的步驟后,已經打開了創建的工程,先進行首次編譯,查看是否有編譯錯誤。
正常的編譯結果應該是0 Error(s),0 Warning(s)。
②實現串口重定向,修改usart.c和usart.h文件
usart.c中修改兩個位置。
一個是在/* USER CODE BEGIN 0 */和/* USER CODE END 0 */之間新添加如下代碼:
/* USER CODE BEGIN 0 */
uint8_t uart_rx_data = 0;//串口中斷接收的數據存儲
int fputc(int ch, FILE *f){ HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF); return ch;}/* USER CODE END 0 */
另一個是修改void MX_USART1_UART_Init(void)函數,在該函數中的
/* USER CODE BEGIN USART1_Init 2 */和 /* USER CODE END USART1_Init 2 */之間加入代碼:
void MX_USART1_UART_Init(void){
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */ /* USER CODE BEGIN USART1_Init 1 */ /* USER CODE END USART1_Init 1 */
huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; if (HAL_UART_Init(&huart1) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN USART1_Init 2 */ HAL_UART_Receive_IT(&huart1,&uart_rx_data,1);//開啟接收中斷 /* USER CODE END USART1_Init 2 */
}
Usart.h中,需要包含stdio.h,在/* USER CODE BEGIN Includes */和/* USER CODE END Includes */之間加入代碼:
/* USER CODE BEGIN Includes */#include "stdio.h"/* USER CODE END Includes */
Usart.h中,在/* USER CODE BEGIN Private defines */和/* USER CODE END Private defines */之間加入代碼:
/* USER CODE BEGIN Private defines */extern uint8_t uart_rx_data;/* USER CODE END Private defines */
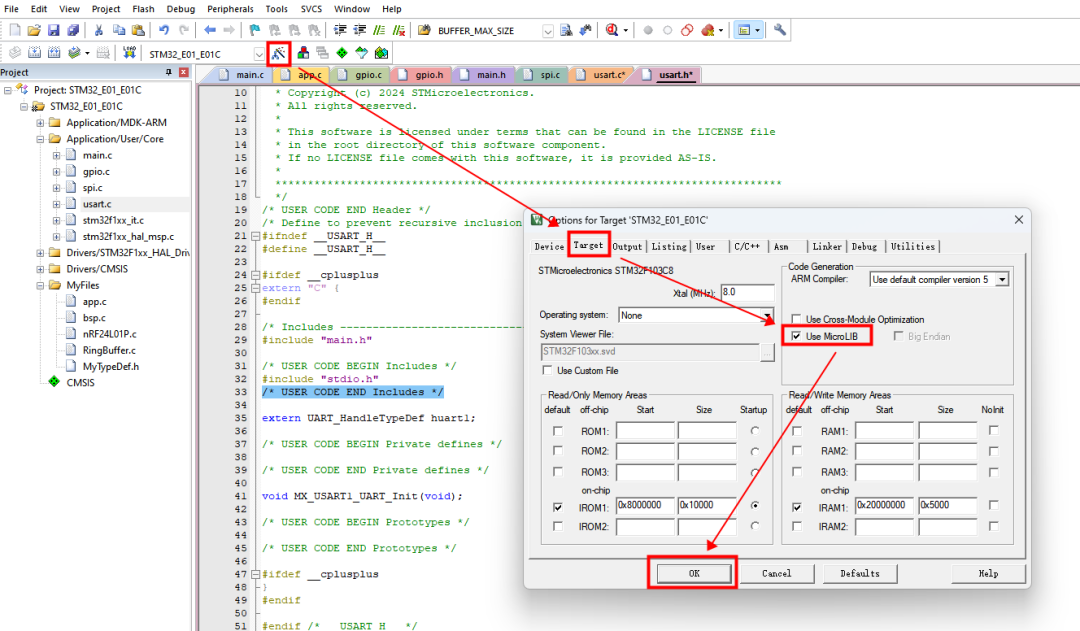
啟用MicroLIB
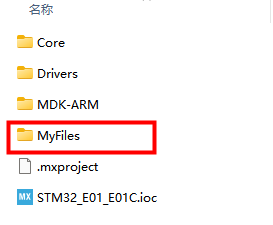
③在創建的工程路徑下,新建一個名為MyFiles的文件夾,并將例程中的如下文件均復制到MyFiles文件夾中。

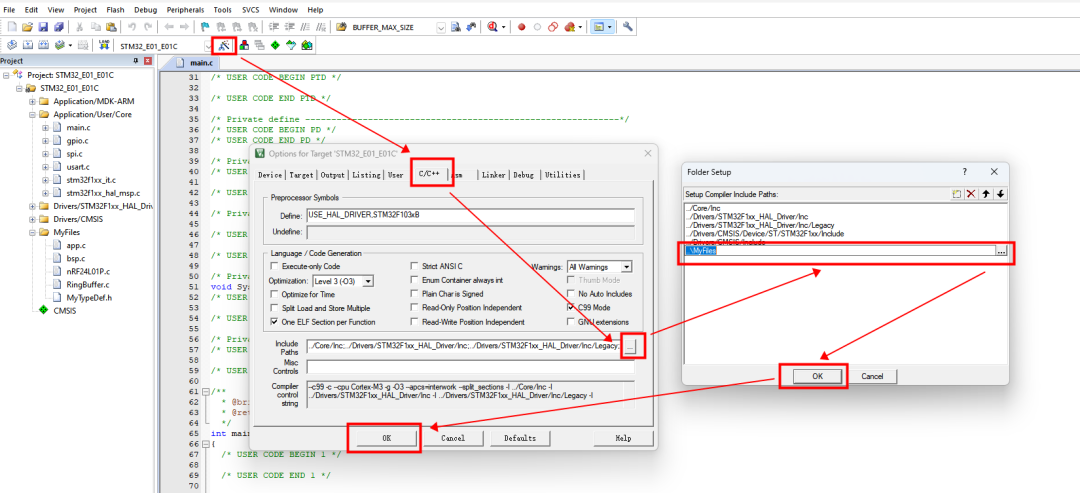
④添加MyFiles的文件夾路徑到工程。
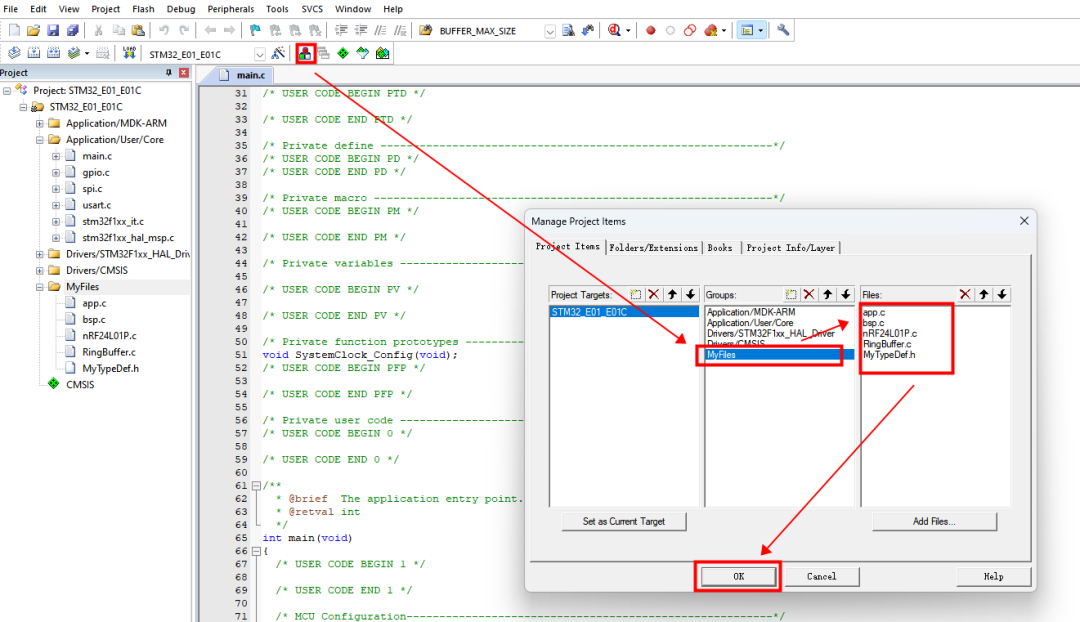
⑤在工程中新建文件夾,并將復制的文件添加到工程之中
⑥修改添加到MyFiles文件夾下的所有.c和.h文件
由于涉及到的修改較多,不做一一介紹,直接給出修改后的該文件夾下的所有文件附件。(可聯系獲取)
⑦修改main.c文件
在/* USER CODE BEGIN Includes */和/* USER CODE END Includes */之間添加為app.h 和bsp.h的包含:
/* USER CODE BEGIN Includes */#include "bsp.h"#include "app.h"/* USER CODE END Includes */
修改int main(void)函數:/** * @brief The application entry point. * @retval int */int main(void){ /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_SPI1_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ BSP_MCU_Initial(); BSP_RF_Initial(); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ APP_Process(); } /* USER CODE END 3 */}
添加USART1的接收和發送中斷回調函數,
在/* USER CODE BEGIN 4 */和/* USER CODE END 4 */加入代碼:
/* USER CODE BEGIN 4 */void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ if(huart == &huart1) { Uart_Rx_interrupt_Cb();
}}
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart){ if(huart == &huart1) { Uart_Tx_interrupt_Cb(); }}/* USER CODE END 4 */
⑧修改stm32f1xx_it.c文件
添加對app.h的包含,在/* USER CODE BEGIN Includes */和/* USER CODE END Includes */之間加入代碼:
/* USER CODE BEGIN Includes */#include "app.h"/* USER CODE END Includes */
修改void SysTick_Handler(void)函數,
在 /* USER CODE BEGIN SysTick_IRQn 1 */和/* USER CODE END SysTick_IRQn 1 */之間加入:
/** * @brief This function handles System tick timer. */void SysTick_Handler(void){ /* USER CODE BEGIN SysTick_IRQn 0 */ /* USER CODE END SysTick_IRQn 0 */ HAL_IncTick(); /* USER CODE BEGIN SysTick_IRQn 1 */ Uart_1ms_Interrupt_Cb(); /* USER CODE END SysTick_IRQn 1 */}
至此,程序移植已經全部完成,再次重新編譯。如果出現warning: #1-D: last line of file ends without a newline這個警告,請在該文件最后一行添加新行。
通信驗證
①程序下載
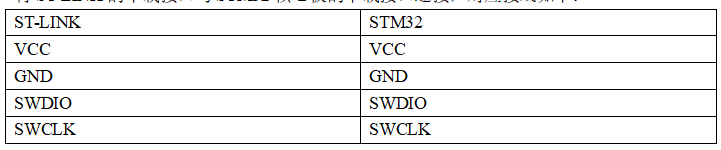
將ST-LINK的下載接口與STM32核心板的下載接口連接,對應接線如下:
Debug配置:
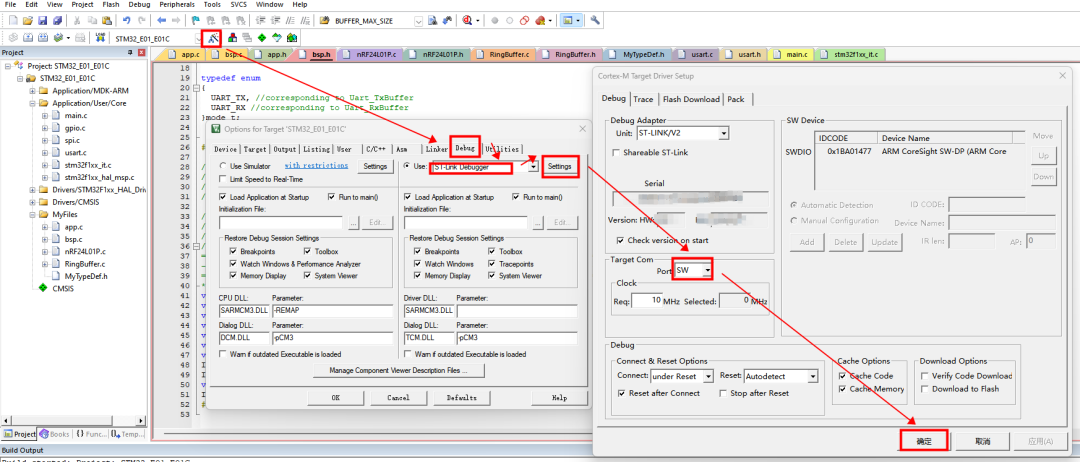
配置完成后,點擊LOAD進行下載。

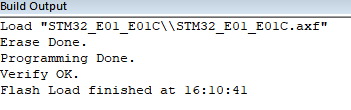
下載成功后,會出現如下提示:
②硬件連接
建議在接線過程中斷電操作。STM32核心板的供電使用自帶的USB接口供電。
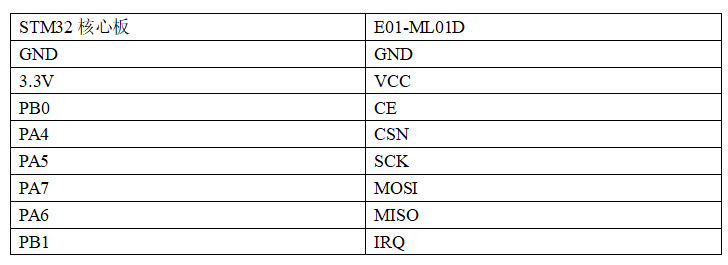
STM32核心板與E01-ML01D連接
STM32核心板與USB轉TTL工具連接

③通信測試
將核心板通過USB接口供電,USB轉TTL工具連接上電腦上的串口調試助手。串口調試助手配置如下:
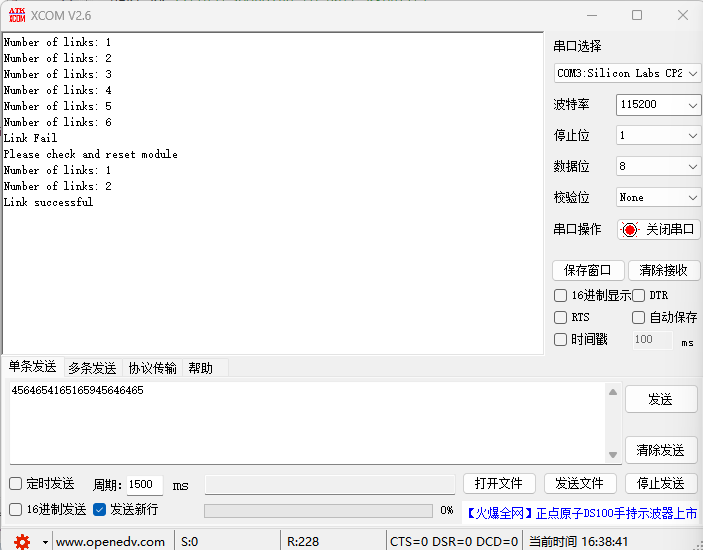
將STM32核心板復位,它首先會檢查與E01-ML01D的連接。如果連接成功,則會打印Link successful。如果鏈接失敗,則會打印Link Fail Please check and reset module。最大連接次數為6次,每次連接會打印當前連接次數。
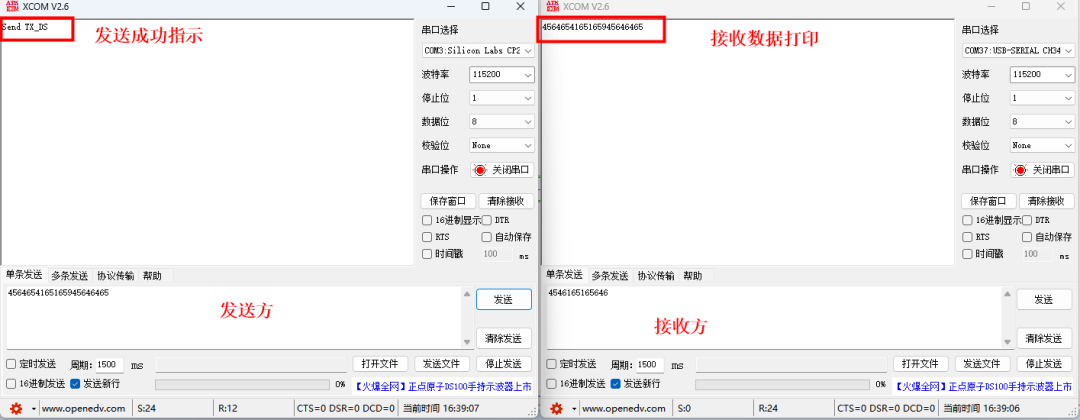
數據發送和接收,例程使用了nRF24L01P的ACK功能,所以在發送成功則會打印Send TX_DS,發送失敗會打印Send MAX_RT。
總結
以上實驗中,實現了基于STM32F103C8T6核心板的E01-ML01D的驅動移植以及通信驗證,其中的E01-ML01D可以替換為任意型號的nRF24L01P或者Si24R1的模塊。也可以稍加修改,適用于其他STM32系列的MCU。
-
mcu
+關注
關注
146文章
16645瀏覽量
347674 -
驅動
+關注
關注
12文章
1785瀏覽量
84893 -
STM32
+關注
關注
2257文章
10822瀏覽量
352410
發布評論請先 登錄
相關推薦
E1985B B.02 E1985C C.02 E1985C C.01 E6785B B.01語法指南
長虹FSP2054E01C_FSP2053E01相關資料推薦
求助,是否需要禁用VCP以通過STM32F429I-DISC1 (E01) 上的引腳PA9和PA10訪問USART1?
DS28E01-100.pdf
24c01a的讀寫程序
TPD1E01B04 適用于 USB Type-C 和 Thunderbolt 3 的單通道 ESD 保護二極管

HDSP-G01E 10.16毫米(0.4英寸)雙數字通用七段顯示器

STM32程序移植的NRF24L01模塊詳細說明

DCAP3000系列-V20D(E)01-技術說明書-CH

DS1855E-C01+T&R 數據采集 - 數字電位器






 工商網監
工商網監
評論