 專為人形機器人應用打造,助力具身智能行業發展,泰科機器人關節模組持續升級!
專為人形機器人應用打造,助力具身智能行業發展,泰科機器人關節模組持續升級!
隨著國內人形機器人爭相登場,具身智能技術也在不斷突破。其中,高性能關節作為人形機器人的核心動力元件,對機器人的運動能力、精準度和靈活性起著至關重要的作用。
適用于人形機器人的關節不僅需要具備基礎的穩定性,還必須具備低能耗和低摩擦損失的特性。由于人形機器人在行走或擬人作業運動過程中,關節必須頻繁的進行正反向運動和快速的加減速操作,就要求關節能夠在嚴苛的運行條件下高效工作,包括并且能在短時間內承受過載。
此外,當人形機器人進行諸如快速奔跑或彈跳等高動態運動時,關節必須有高過載能力和高動態響應能力,這就需要關節模組具備瞬時爆發式的功率輸出能力,這意味著在執行某些高動態任務時,整個驅動器的慣性應盡可能低,以縮短機器人關節從接收到指令信號到完成指令要求的工作狀態的響應時間。此外,在部分人形機器人需要進行高速、高負載的運行應用場景中,對關節模組的功率密度和扭矩提出了更高的要求。
為滿足新老客戶在定制人形機器人一體化關節時的最新需求,泰科機器人在結構設計、材料選擇和定制化開發等方面不斷推出創新方案,產品全系可覆蓋人形機器人全身關節需求,包括上肢、腰部、下肢和頭部等多個部位,并已支持多種形態機器人的開發。高度集成化的關節模組不僅縮短了行業客戶在硬件開發上的周期,還使得自由組合和簡化組裝過程成為可能,加速了具身智能化機器人產品的快速落地與部署。
 人形機器人關節模組
人形機器人關節模組泰科機器人很早就開始布局人形機器人核心零部件領域。近年來與多家國內高端人形機器人行業客戶進行深度合作,堅持客戶為先,追求高效實干,專注于創新研發,力爭成為人形機器人產業鏈上高性能國產替代的領軍企業。泰科機器人HJX系列關節模組,旨在為人形機器人提供最佳的動力元件選型方案,產品輕量化結構設計,專門為人形機器人開發進行優化,已有多種規格,并提供定制化服務,支持EtherCAT或CANopen(可選)通訊協議。
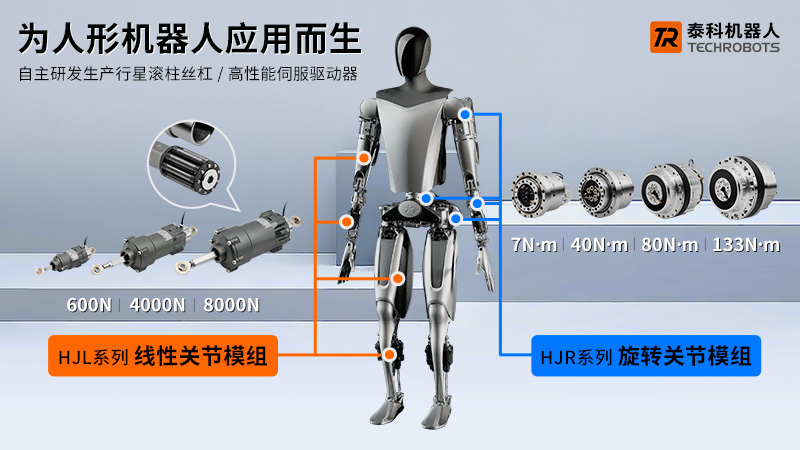
HJL系列線性關節模組
目前有HJL08、HJL12和HJL15三個系列,利用行星滾柱絲杠結構產生強大推力,內部集成拉壓力傳感器, 最大推力分別達到600N、4000N和8000N,最大速度可達120mm/s、300mm/s、400mm/s,靈活應用在人形機器人的上臂、前臂、大腿及小腿等處,滿足人形機器人四肢的肘、腕、膝、踝關節高負荷運行。
 線性關節模組參數
線性關節模組參數HJR系列旋轉關節模組
目前有HJR14、HJR17、HJR20、HJR25四個系列,使用創新的諧波減速器結構,重量相較老版本減少25%以上,在保持扭矩等輸出性能的同時,使關節模組整體輕量化進一步提升。其中HJR25最大平均負載轉矩133N·m,最大瞬時轉矩可達376N·m。內部還集成了單維力傳感器,提高人形機器人頭、肩、肘、腰、髖關節運動的精確需求。
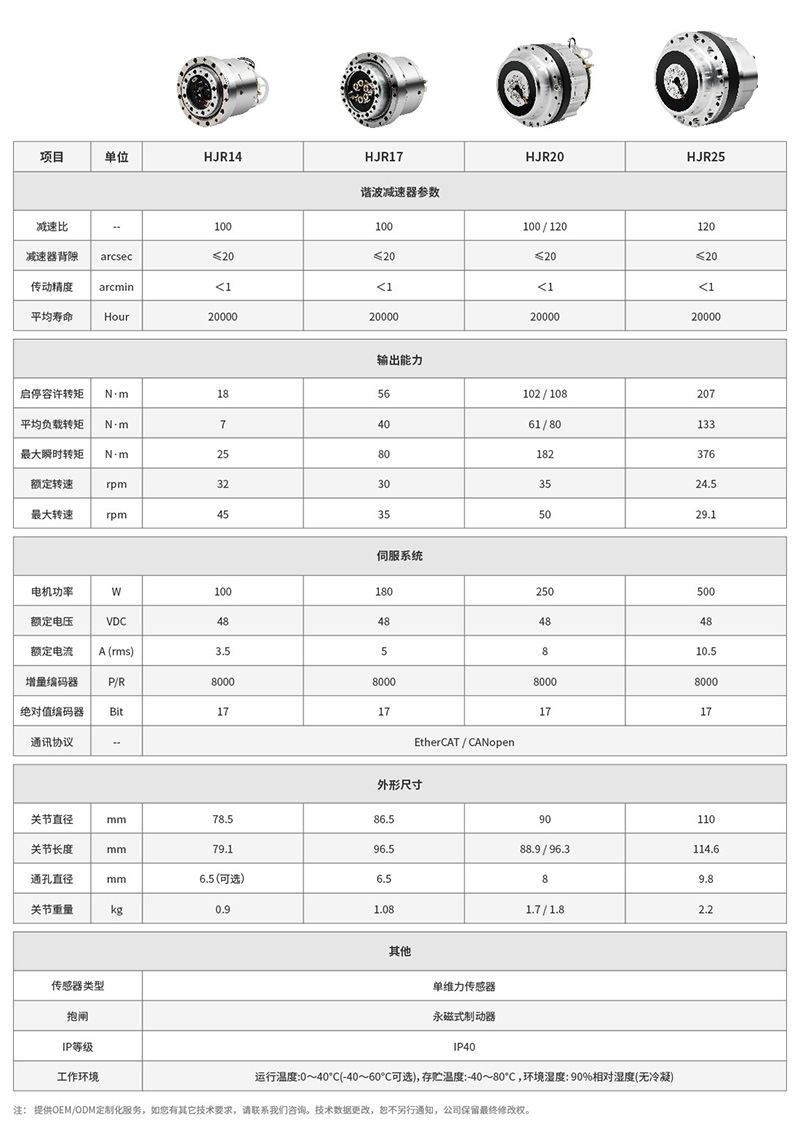 旋轉關節模組參數
旋轉關節模組參數深圳市泰科智能機器人有限公司擁有3200平米研制基地,始創于2008年,依托多年低壓伺服驅動的核心技術積累,2016年開始研發協作機器人本體和關節模組,憑借追求卓越的定制開發能力,始終堅持以客戶獨特需求為中心,提供高效、成熟、快速、可靠的各類解決方案。2023年10月,泰科機器人正式被認定為國家高新技術企業,同時也建立了覆蓋全國的銷售、技術支持及售后服務體系,獲得了眾多客戶的青睞。已與數十家企業、研究院所與高校建立了長期合作關系,為客戶定制各類關節模組、人形機器人、雙臂機器人、多軸協作機械臂、伺服驅動等系列產品。
-
驅動器
+關注
關注
51文章
7991瀏覽量
144984 -
機器人
+關注
關注
210文章
27828瀏覽量
204543 -
人形機器人
+關注
關注
2文章
378瀏覽量
16333
發布評論請先 登錄
相關推薦
軟通動力與智元機器人達成合作,共繪人形機器人“具身智能”新篇章
具身智能與人形機器人領域現狀、挑戰以及未來方向
泰科機器人攜新款行星滾柱絲杠線性關節模組和雙臂協作機器人亮相2024年ITES深圳工業展

廣和通成功入選2024人形機器人供應鏈優質企業
廣東省具身智能機器人創新中心正式啟動,奧比中光參股
廣和通發布基于高通高算力芯片的具身智能機器人開發平臺Fibot

廣和通發布基于高通高算力芯片的具身智能機器人開發平臺Fibot
廣和通發布具身智能機器人開發平臺Fibot
華為云攜手樂聚機器人,共探人形機器人智能新紀元
具身智能移動操作機器人發展與研究






 工商網監
工商網監
評論