 一種基于磁懸浮的超精密加工新導軌技術
一種基于磁懸浮的超精密加工新導軌技術
作者Per Schreiber,漢諾威萊布尼茨大學生產工程和機床研究所 (IFW)
超精密加工廣泛應用于醫療設備、光學、計量和微電子機械系統等領域,在其中發揮著重要作用。用于以亞微米精度移動機器部件和工件的導軌技術對加工過程的整體準確度和速度具有重大影響。最常用的兩種導軌技術 - 靜液壓驅動和空氣靜壓驅動 - 可提供平穩的運動和抑制振動的阻尼。然而,實現和維護這些導軌可能既昂貴又復雜,尤其是對于需要多個自由度的應用更是如此。
在漢諾威萊布尼茨大學生產工程和機床研究所,我和同事們實現了一種基于磁懸浮的超精密加工新導軌技術。這種方法既能克服現有導軌技術的一些缺點,又能保持極高的精度。電磁懸浮導軌支持額外的自由度和主動減振,可以提高生產速度,從而使超精密加工工作效率的顯著提高成為可能。我們使用原型加工了一個鋁制工件,切削深度從 3 微米到 7 微米不等,表面粗糙度小于 45 納米 Sa(圖 1)。我們使用了基于模型的設計來構建實現這種精度所需的實時控制系統,即先在 Simulink? 中對系統進行建模和仿真,然后使用 Simulink PLC Coder? 生成 IEC 61131-3 結構化文本以部署在 Beckhoff? 工控機上。此工作流不僅使我們能夠加快開發速度,還最大限度地減少了繁瑣耗時的手動編碼結構化文本的工作量。
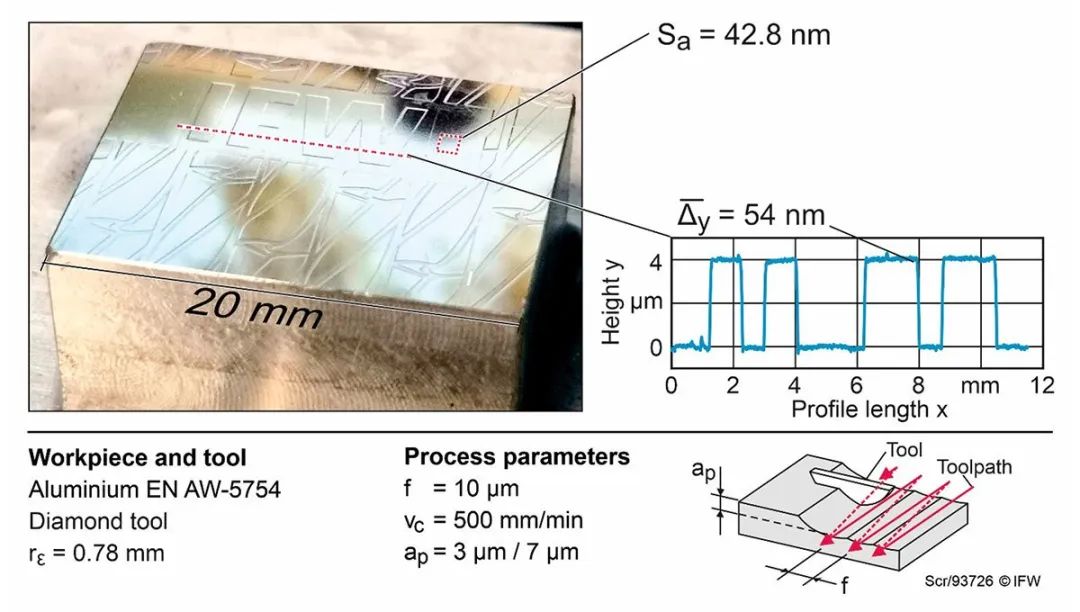
圖 1. 采用電磁懸浮導軌技術加工的鋁制工件。
使用磁懸浮的軸控制
為了證明在超精密切削中應用懸浮技術的可行性,我們設計并制造了原型。該原型包括完整的三軸超精密銑床的所有相關功能。與單軸導軌原型相比,我們可以在實際超精密切削過程中評估此導軌技術。我們的原型系統設計包括三個宏觀層面的軸(x、y 和 z)以及五個額外的精細定位自由度 (DoF)(圖 2)。這些額外的自由度由電磁懸浮導軌管理,支持更精確的 x 軸和 z 軸定位以及旋轉定位(滾動、俯仰和偏轉)。在加工過程中,宏觀軸 x 和 z 提供進給運動,y 軸用于預調整主軸和刀具位置。用線性編碼器測量沿這些軸的位置。
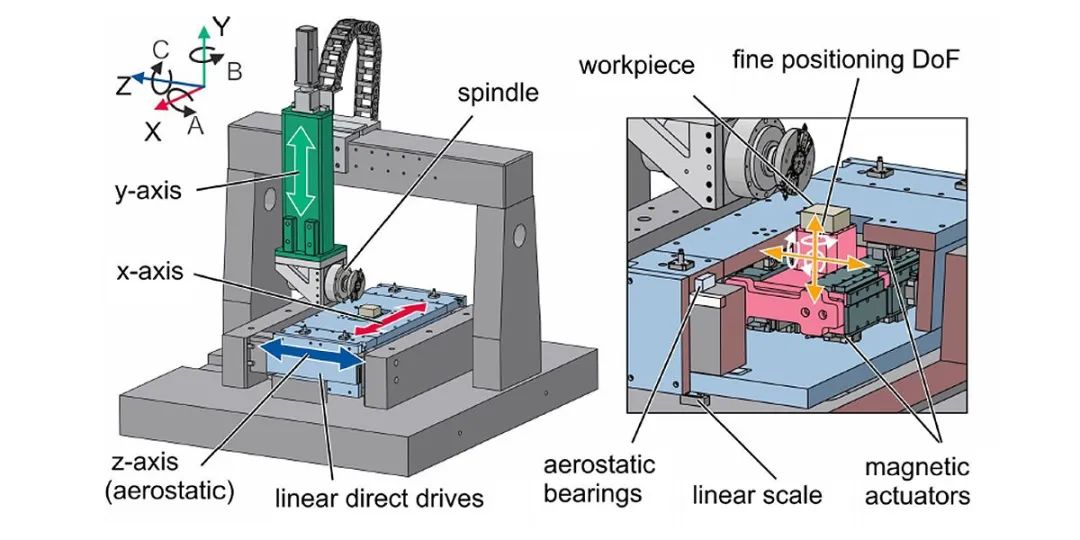
圖 2. 超精密加工原型:左側顯示大尺寸定位軸(x、y 和 z 軸),右側顯示使用電磁作動器的小尺寸定位。
12 個電磁作動器用于懸浮工件,12 個電容傳感器用于測量工件滑塊和每個電磁體之間的間隙距離,它們共同實現了精確定位控制。滑塊在六個自由度中的姿態是根據這些測量值得出的。
控制架構同樣是圍繞著原型的宏觀層面和精細定位層面進行組織的。一個控制子系統專用于主要的 x 軸、y 軸和 z 軸,另一個子系統用于電磁懸浮系統(圖 3)。我們為原型選擇的 Beckhoff 工控機支持的最大采樣率為 20 kHz。此控制器以此采樣率運行,負責管理超精密定位,并通過電磁體保持足夠的反向力,使刀具能夠切削工件。
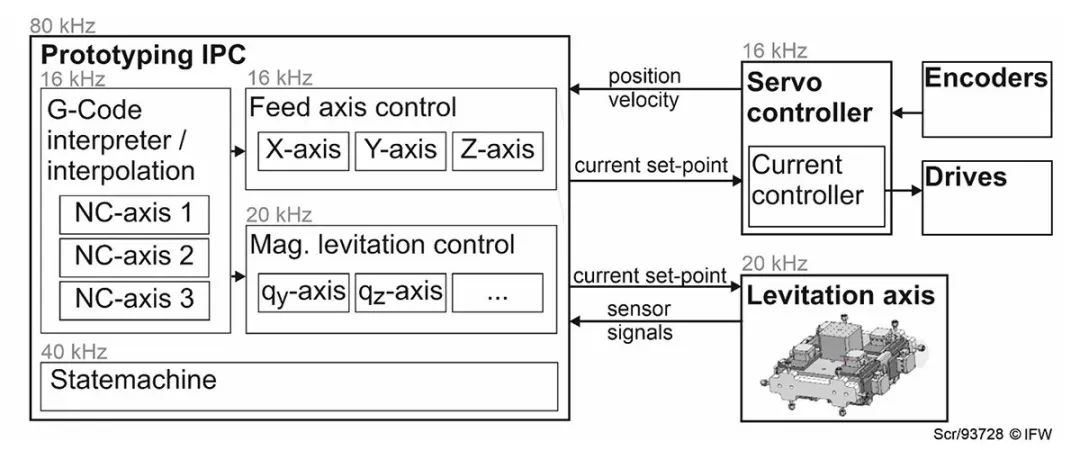
圖 3. 原型控制架構。
控制器的建模與仿真
我們在 Simulink 中對宏觀層面控制系統和精細定位控制系統進行建模。宏觀層面的系統相對簡單。它基于具有比例積分控制器的級聯控制回路,會根據來自 x 軸、y 軸和 z 軸編碼器的位置和速度測量值輸出電流設定值(圖 4)。
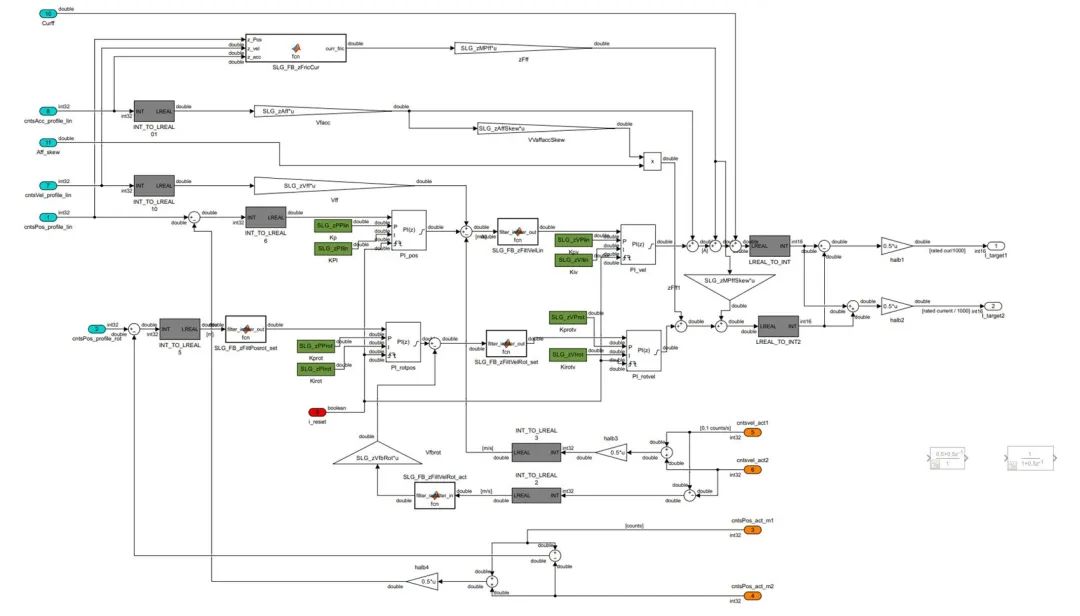
圖 4. z 軸宏觀層面控制器的 Simulink 模型。
五個自由度中的每個自由度在精細定位控制系統中都有一個對應的比例-積分-導數 (PID) 控制器。此控制器根據原型的 12 個電容傳感器的輸入計算電磁體的電流設定值。由于開環狀態下的電磁懸浮在本質上是不穩定的,因此在硬件上測試之前需要進行仿真以確定初始控制參數集。在準備過程中,我們創建了被控對象模型。該模型可捕獲電容傳感器的特性、傳輸延遲、電流與電磁鐵和工件之間間隙的非線性關系及其他效應。我們在 Simulink 中使用控制器和被控對象模型進行了大量閉環仿真,以評估控制系統的穩健性,并在工作過程中執行多項改進以提高性能。
生成結構化文本并測試原型
在通過仿真驗證控制設計后,我們使用 Simulink PLC Coder 從 Simulink 模型中生成了 IEC 61131-3 結構化文本。然后,我們導入、編譯控制應用程序并將其部署到與硬件原型的傳感器和作動器相連的 Beckhoff 工控機上。我們一開始的測試看起來很有希望,但不出所料,我們需要調整精細定位控制器中的一些參數以提高性能。這些調整需要考慮電磁體特性的制造差異(這會影響背鐵處磁體之間約 200 微米的間隙)以及機器裝配中的其他容差。在模型中進行必要的更改并通過仿真進行驗證后,我們從模型中重新生成了結構化文本,并執行進一步測試以驗證原型的超精密加工能力。
下一代改進
基于模型的設計有助于實現我們的最初目標:展示首創使用磁懸浮導軌進行超精密加工的全功能原型。在開發下一代原型時,我們將繼續使用 Simulink 和 Simulink PLC Coder 進行建模、仿真和代碼生成。除了諸多改進外,我們還在這個新機器中集成了六自由度光學位置傳感器,用以取代電容式間隙傳感器。由于這些傳感器都不太容易受到電磁噪聲的影響,我們預計此項變更將進一步提高新一代機器的精度。
-
控制器
+關注
關注
112文章
16214瀏覽量
177478 -
磁懸浮
+關注
關注
10文章
99瀏覽量
19887 -
模型
+關注
關注
1文章
3178瀏覽量
48729 -
精密加工
+關注
關注
0文章
24瀏覽量
7575
原文標題:基于模型的設計 | 構建磁懸浮原型以實現超精密加工
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
磁懸浮列車
手工DIY創意磁懸浮陀螺的制作方法圖解
基于數值方法的HTS磁懸浮永磁導軌最優化
磁懸浮超跑最高速度可達350km/h
磁懸浮輸送線系統的特點及應用
環形導軌:同步帶傳動的環形導軌,弧形導軌,精密環形導軌輸送線
精密微型導軌加工工藝流程!






 工商網監
工商網監
評論