 Arm處理器助力構建區域控制器
Arm處理器助力構建區域控制器
作者:Arm 汽車事業部高級產品經理 Prakash Mohapatra
汽車行業正在經歷前所未有的巨大變革。在多種趨勢的共同作用下,整個行業供應鏈深受影響。軟件定義汽車 (SDV)、自動駕駛和電氣化正在促使整車廠針對軟硬件開發周期重新進行全方位的思考。
為了更好地管理多個計算元件,并應對日益增長的軟件復雜性(包括對 OTA 遠程無線更新的支持),汽車架構正在持續地發展演進。傳統的模式中,分布式的電子控制單元 (ECU) 管理著汽車中一些特定的功能,因此為了不斷為車輛引入新特性和功能,有更多的 ECU 被添加到架構中。然而,這種模式大大提高了管理復雜軟件和軟件更新的難度,既不具備可擴展性,也不適合 SDV 的發展。
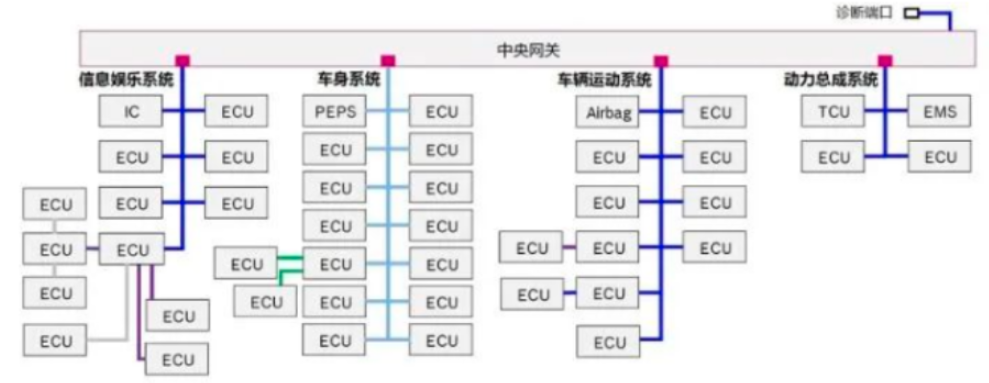
為此,汽車行業正逐步朝著更加集中的架構發展演進。這就意味著負責管理多個功能且空間上布局分散的多個 ECU ,將被整合到可運行多種軟件工作負載的少數但功能強大的區域控制器中。
運行多個軟件工作負載的關鍵要求之一是確保不同軟件工作負載之間免于干擾 (FFI)。在與混合關鍵軟件結合使用時,這一點尤為重要。例如,需要將遵循質量管理要求的 ASIL B 或 ASIL D 等級軟件組件結合使用時。
實現 FFI 的一種方法是通過沙箱技術將每個軟件組件部署到由分離內核隔離的多個虛擬機中。而 Armv8-R 可通過實時虛擬化支持此功能。通過在基于 Armv8-R 的處理器(如 Cortex-R52 和 Cortex-R52+)上使用虛擬機管理程序或更簡單的分離內核,可實現多軟件工作負載之間的 FFI。
因此,Arm Cortex-R52 和 Cortex-R52+ 處理器是構建區域控制器的理想平臺之選,而區域控制器可用于部署多種軟件工作負載。目前,這類工作負載運行在分布式的 ECU 上,其中許多 ECU 均基于 Arm Cortex-M 處理器。
架構集中化趨勢也促使車輛內的域控制器數量不斷地增加。域控制器可以負責管理數字化座艙、先進駕駛輔助系統 (ADAS)、功能安全、網關、車身和底盤等特定功能。這些控制器用于執行計算密集型任務,并連接到多個 I/O 或傳感器。
Cortex-R 處理器所具備的高實時性、高計算性能也使其成為域控制器設計的理想選擇。區域控制器可以在這些設計中整合 I/O 功能,而域控制器負責更高級別的軟件任務。
未來,域控制器和區域控制器將在汽車設計中被更多地使用,而 Cortex-R 處理器也將在其中發揮著重要作用。包括整車廠、一級供應商以及軟件和工具提供商在內的汽車行業將想方設法,把其現有軟件從基于 Cortex-M 處理器的設計無縫遷移到基于 Cortex-R52 和 Cortex-R52+ 處理器的設計上。為滿足這一需求,Arm 創建了軟件遷移指南,幫助指導將現有軟件從基于 Armv7-M 的設計遷移到基于 Armv8-R 的設計。
該指南對 Armv7-M 和 Armv8-R 架構進行了比較,并針對如何將軟件從基于 Cortex-M 的設計遷移到基于 Cortex-R52 和 Cortex-R52+ 的設計提供了指導。指南中涵蓋以下內容:
指令集
寄存器集
異常模型
中斷
虛擬化
系統寄存器
內存模型
工具
啟動
在區域架構這一趨勢的持續演進過程中,獨立 ECU 以及被廣泛應用的基于 Cortex-M 處理器的微控制器 (MCU) 仍將在汽車中發揮著至關重要的作用(點擊閱讀相關文章)。這些 MCU 將推動遠程邊緣傳感點的部署,以低功耗和高效率控制車內的特定操作,并適配 SDV 的新軟件架構。
然而,對于希望在區域控制器中復用其現有軟件的合作伙伴,以及在新項目中使用基于 Cortex-M 和/或 Cortex-R 設計的合作伙伴,這份新指南必將能提供切實有效的幫助。
-
控制器
+關注
關注
112文章
16214瀏覽量
177478 -
ecu
+關注
關注
14文章
881瀏覽量
54409 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166166
原文標題:簡化汽車軟件遷移:從分布式 ECU 到新興電子電氣架構中的區域控制器
文章出處:【微信號:Arm社區,微信公眾號:Arm社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
區域控制器電源負載的智能調度

ARM處理器和CISC處理器的區別

Arm Cortex-R82AE賦能高性能區域控制器設計
經緯恒潤國內首個物理區域控制器量產

芯馳科技發布新一代區域控制器(ZCU)全系列協同解決方案

汽車區域控制器架構趨勢下,這三類的典型電路設計正在改變

ScaleFlux即將推出集成Arm Cortex-R82處理器的企業SSD控制器
汽車區域控制器架構趨勢下的SmartFET應用
淺析ADAS域控制器技術
關于域控制器的基礎知識分享
羅徹斯特電子對ARM微處理器和微控制器提供可持續供貨
邊緣區域控制器如何實現地下管廊智能管理

區域控制器變革引領電子電氣架構進化,馬達驅動助力智能汽車舒適度提升!






 工商網監
工商網監
評論