 雷龍LSYT201B語言模塊結合STM32使用(噪聲環境也能高精度)
雷龍LSYT201B語言模塊結合STM32使用(噪聲環境也能高精度)
雷龍LSYT201B語音模塊配合STM32使用視頻示例:https://www.bilibili.com/video/BV1SZ421M7oE?t=2.9
前言
基于YT2228芯片開發的一款面向智能家居控制的離線語音控制模組,離線語音模塊,集成藍牙功能,可適配各種不同的應用場景,方便使用,減少開發周期。模塊通過麥克風對語音進行采集,然后由語音芯片進行識別處理,識別成功的結果可通過語音進行播報和通過串口下發指令給整機控制板。
一、LSYT201B
一、產品簡介
YT2228 是根據智能語音交互市場需求及思必馳算法的發展方向定義開發的 “芯片+算法”人工智能人機語音交互解決方案,具有高性能、低功耗等特點。
該芯片通過軟硬融合的方法,具備快速賦予各類設備語音交互的能力,極大的提高了用戶體驗和產品靈活性。該芯片支持家居5m交互,本地最多可識別150詞,具備多輪交互能力。
二、產品特征
2.1 處理器
? 32位處理器,支持FPU(Hardware Float Point Unit)
? 運行頻率:240MHz
? 內置 2MB FLASH
? 64中斷向量
? 4級別中斷優先級
2.2 外設
? USB1.1
? 4個多功能16位定時器,支持捕獲和PWM模式
? 3個16位PWM發生器,可用于驅動電機
? 2個SPI
? 所有GPIO支持外部中斷
2.3 音頻
? 兩通道 16 位 DAC,SNR> = 95dB
? 單通道 16 位 ADC,SNR> = 90dB
? 采樣率支持 8KHz / 11.025KHz / 16KHz / 22.05KHz / 24KHz
/32KHz / 44.1KHz / 48KHz
2.4 藍牙
? 符合藍牙 V5.1 + BR + EDR + BLE 規范
? 滿足 Class1 class2 和 class3 傳輸功耗需求
? 支持 GFSK 和 π/ 4 DQPSK 所有包裝類型
? 最大+ 6dbm 發射功率
? 接收器最小靈敏度
2.5 電源
? VDDIO可輸出50mA@2.2-3.6V
? 模組功耗:50mA
2.6 封裝
? VSSOP28(0.635)/QSOP28
2.7 溫度
? 工作溫度:-40℃ to +85℃
? 存儲溫度:-65℃ to +150℃
2.8 應用領域
? 智能家電(生活電器、廚房家電等)
? 智能衛浴、智能照明、智能家居
? 智能玩具
? 空調伴侶
二、使用步驟
現在也已經大致了解了這個模塊的功能,那么能不能結合單片機來使用呢。
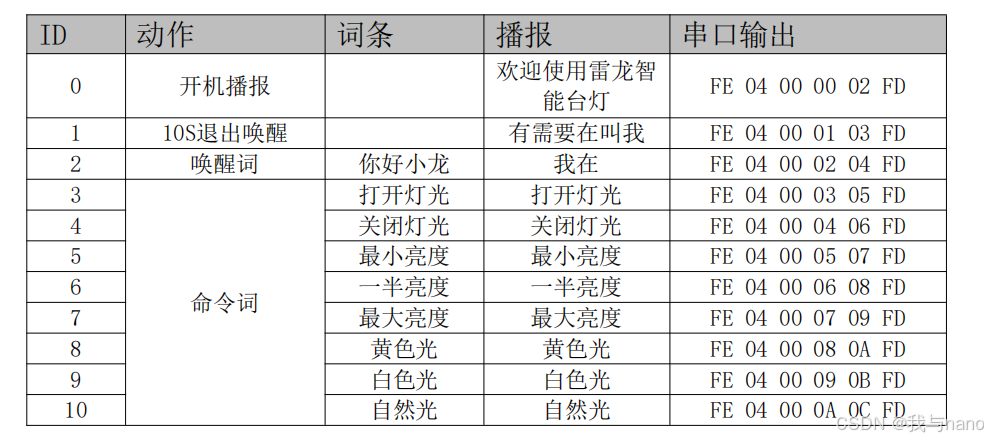
1.UART 控制協議
先來看一下他的通信協議
采用標準 UART 異步串口接口, 3.3V TTL 電平。通訊格式
波特率9600、數據位8 位、停止位1 位、奇偶校驗位無、流控無。

有了這些東西去對他進行開發還不是輕輕松松,關鍵效果怎么樣呢(太強了,從視頻里就能看出)
2.代碼
廢話不多說直接貼代碼。由于STM32接收的是ASII碼,我們先將他轉十六進制字符串,然后用strcmp來對字符串作比較。
代碼如下:
#include "sys.h"
#include "usart.h"
#include "led.h"
#include "string.h"
//
//如果使用ucos,則包括下面的頭文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif
#if 1
#pragma import(__use_no_semihosting)
//標準庫需要的支持函數
struct __FILE
{
int handle;
};
FILE __stdout;
//定義_sys_exit()以避免使用半主機模式
_sys_exit(int x)
{
x = x;
}
//重定義fputc函數
int fputc(int ch, FILE *f)
{
while((USART2->SR&0X40)==0);//循環發送,直到發送完畢
USART2->DR = (u8) ch;
return ch;
}
#endif
/*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#if EN_USART1_RX //如果使能了接收
//串口1中斷服務程序
//注意,讀取USARTx->SR能避免莫名其妙的錯誤
u8 USART_RX_BUF[USART_REC_LEN]; //接收緩沖,最大USART_REC_LEN個字節.
//接收狀態
//bit15, 接收完成標志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字節數目
u16 USART_RX_STA=0; //接收狀態標記
u8 USART2_RX_BUF[USART_REC_LEN]; //接收緩沖,最大USART_REC_LEN個字節.
//接收狀態
//bit15, 接收完成標志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字節數目
u16 USART2_RX_STA=0; //接收狀態標記
void uart_init(u32 bound){
//GPIO端口設置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA時鐘
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空輸入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根據指定的參數初始化VIC寄存器
//USART 初始化設置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為8位數據格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一個停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//無硬件數據流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//開啟串口接受中斷
USART_Cmd(USART1, ENABLE); //使能串口1
}
void uart2_init(u32 bound){
//GPIO端口設置
//GPIO端口設置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA時鐘
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE); //使能USART2
//USART2_TX GPIOA.2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA.2
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.2
//USART1_RX GPIOA.3初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空輸入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.3
//Usart2 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根據指定的參數初始化VIC寄存器
//USART 初始化設置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為8位數據格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一個停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//無硬件數據流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
USART_Init(USART2, &USART_InitStructure); //初始化串口2
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//開啟串口接受和發送中斷
USART_Cmd(USART2, ENABLE);
}
void USART2_IRQHandler(void) //??2??????
{
u8 Res,t;
/
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收中斷(接收到的數據必須是0x0d 0x0a結尾)
{
Res =USART_ReceiveData(USART2); //讀取接收到的數據
if((USART2_RX_STA&0x8000)==0)//接收未完成
{
if(USART2_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART2_RX_STA=0;//接收錯誤,重新開始
else USART2_RX_STA|=0x8000; //接收完成了
}
else //還沒收到0X0D
{
if(Res==0x0d)USART2_RX_STA|=0x4000;
else
{
USART2_RX_BUF[USART2_RX_STA&0X3FFF]=Res ;
USART2_RX_STA++;
if(USART2_RX_STA>(USART2_REC_LEN-1))USART2_RX_STA=0;//接收數據錯誤,重新開始接收
}
}
}
}
}
void USART1_IRQHandler(void) //串口1中斷服務程序
{
u8 Res;
char result[100];
char hex_string[30];
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中斷(接收到的數據必須是0x0d 0x0a結尾)
{
Res =USART_ReceiveData(USART1); //讀取接收到的數據
sprintf(hex_string,"%02X", Res);
//printf("%srn",hex_string);
sscanf(hex_string + 5, "%s", hex_string);
if(!strcmp(hex_string,"03"))
{
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
GPIO_ResetBits(GPIOE,GPIO_Pin_5);
}
if(!strcmp(hex_string,"04"))
{
GPIO_SetBits(GPIOB,GPIO_Pin_5);
GPIO_SetBits(GPIOE,GPIO_Pin_5);
}
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收錯誤,重新開始
else USART_RX_STA|=0x8000; //接收完成了
}
else //還沒收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收數據錯誤,重新開始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS.
OSIntExit();
#endif
}
#endif
總結
兄弟們,太強了,25塊錢能夠抗噪聲的語音識別播報一體模塊,還要什么自行車。就是喚醒詞不能自己定制,需要聯系技術人員幫你定制。(可以遠程)
————————————————
雷龍發展公司致力于為客戶提供一站式的離線語音解決方案。我們的服務涵蓋了多個領域,包括家電、醫療器械、安防報警、汽車電子、多媒體、通信、電話錄音、工業自動化控制、玩具及互動消費類產品等。通過我們的專業知識和經驗,我們能夠滿足各類產品的語音交互需求,讓用戶享受更加智能、便捷的使用體驗。
審核編輯 黃宇
-
STM32
+關注
關注
2266文章
10876瀏覽量
354922 -
智能家居
+關注
關注
1926文章
9523瀏覽量
184371 -
人機語音
+關注
關注
0文章
3瀏覽量
7145
發布評論請先 登錄
相關推薦
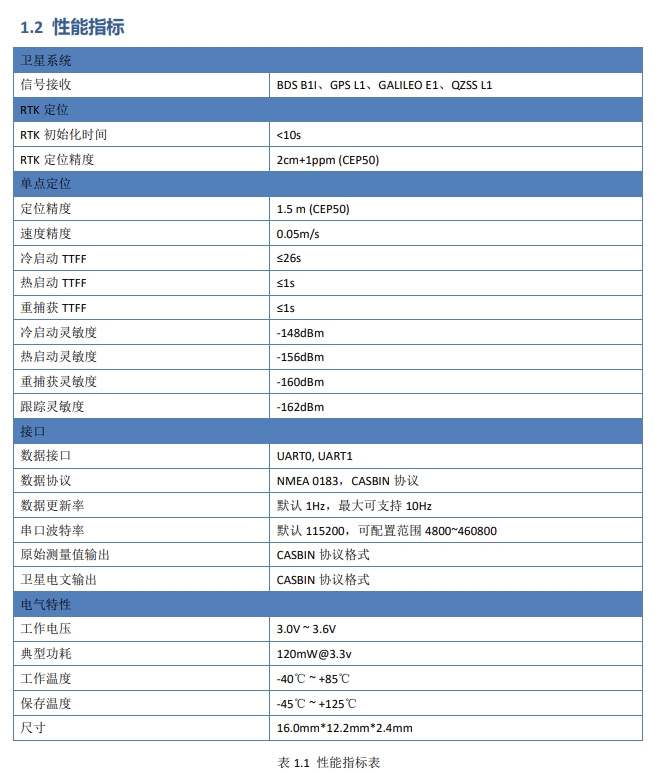
物聯網系統中高精度RTK定位方案的實現_高精度定位模塊

北斗高精度智能安全帽|厘米級高精度定位|云端一體化|智能全能
語音模塊——LSYT201B模組(超詳細)
AT372-6P單頻高精度定位模塊datasheet
TX6212B高精度、低噪聲、CMOS LDO穩壓器英文手冊
語音控制模塊_雷龍發展
什么是高精度定位平板?
高精度低噪聲 3A LDO 穩壓器PCD3933數據手冊
高精度低噪聲 1.5A LDO 穩壓器PCD3932數據手冊
3A、低輸入電壓、低噪聲、高精度、低壓降 (LDO) 穩壓器TPS7A53B數據表

3A、低輸入電壓、低噪聲、高精度、低壓降 (LDO) 穩壓器TPS7A53B數據表
Aigtek:如何設計一個高精度電壓源

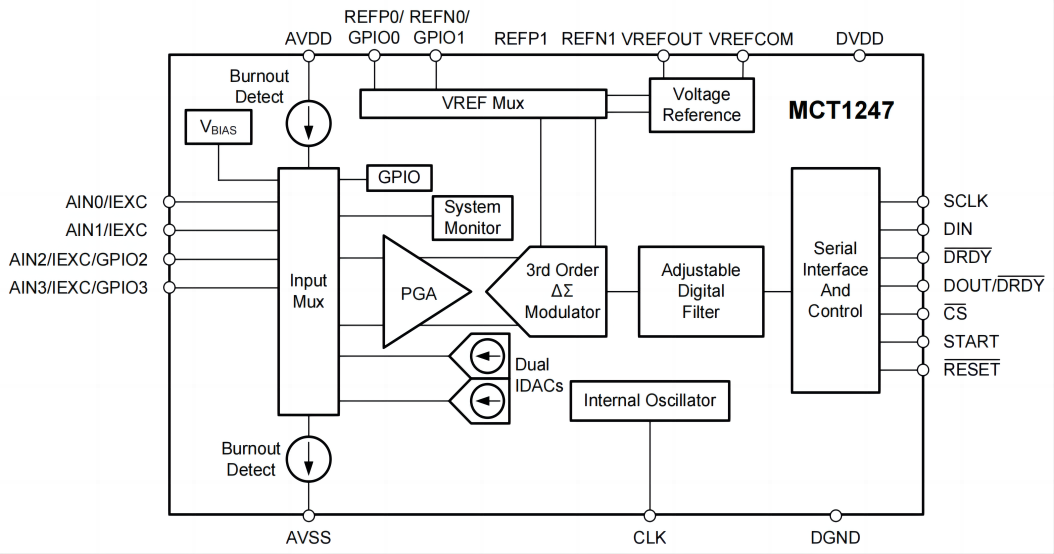
24位高精度ADC MCT1247產品介紹





 工商網監
工商網監
評論