") 前途廣闊的MEMS-IMU
前途廣闊的MEMS-IMU
IMU,Inertial Measurement Unit,即慣性測量單元。如今IMU已不僅限于專業(yè)導(dǎo)航中使用,其應(yīng)用范圍涉獵廣泛:遠至軍事防御、航空航天、海事等領(lǐng)域,近至日常的微信定位、智能手機、汽車/火車、無人駕駛、智能家居等方面均會使用。MEMS-IMU發(fā)展之路“前途廣闊”基于傳統(tǒng)慣性器件的特點,將MEMS與之結(jié)合可極大地改善傳統(tǒng)慣性器件的缺點。MEMS是將微電子技術(shù)和機械工程融合到一起的工業(yè)技術(shù),伴隨著制作集成電路的硅半導(dǎo)體工藝的完善,20世紀80年代出現(xiàn)的微型機械、微型傳感器和微型執(zhí)行器的微機械制造技術(shù),使得MEMS技術(shù)成為現(xiàn)實產(chǎn)品,滿足不同需求的應(yīng)用領(lǐng)域。根據(jù)對MEMS-IMU精度要求不同,大概可將其分為低精度、中精度和高精度三類。(1)低精度MEMS-IMU應(yīng)美盛(InvenSense)旗下的 ICM-20602 6軸慣性傳感器(3軸加速度計 + 3軸陀螺儀)全面支持谷歌 Daydream 和 Tango 的要求,可批量生產(chǎn)應(yīng)用于 Daydream 認證和兼容Tango的智能手機,以構(gòu)建的 VR/AR 生態(tài)系統(tǒng)。這便是低精度MEMS-IMU應(yīng)用的一個成功案例。總結(jié)來看低精度MEMS-IMU主要用于消費電子類的產(chǎn)品,其應(yīng)用范圍極為廣泛,可用于手機、游戲機、音樂播放器、無線鼠標、數(shù)碼相機、硬盤保護器、智能玩具、計步器、防盜系統(tǒng)等。與環(huán)境傳感器等器件結(jié)合,可實現(xiàn)助聽、運動感測等功能。這類低精度的MEMS-IMU主要要求是:單價低、尺寸小、溫度范圍窄。
應(yīng)美盛ICM-20602 6軸慣性傳感器低精度MEMS-IMU:加速度計尺寸小、重量輕、功耗低,一般測量范圍1~50g,分辨率2mg~10mg,陀螺儀一般量程在±300°/s,零偏在500°/h~1000°/h范圍內(nèi)。(2)中精度MEMS-IMU相比低精度MEMS-IMU,中精度MEMS-IMU主要用于汽車級及工業(yè)級產(chǎn)品。在汽車級產(chǎn)品中,中精度MEMS-IMU不僅可用于GPS 輔助導(dǎo)航系統(tǒng),而其對于車電子穩(wěn)定系統(tǒng)、汽車安全氣囊、車輛姿態(tài)測量也有奇效。例如IMU可以用作高精度定位、汽車自身姿態(tài)的判斷,即使在GPS信號丟失或有阻隔的情形中,IMU也可為汽車提供可靠的信息,這便可確保汽車主動安全,是自動駕駛的關(guān)鍵組件之一。再比如,近些年汽車車身穩(wěn)定系統(tǒng)的標配ESP中,IMU就是其中的關(guān)鍵組件。汽車級可作為一個工業(yè)應(yīng)用的特殊產(chǎn)品,對其可靠性要求高,同時由于需求數(shù)量大,和一般工業(yè)要求不同的是要求單價低。在工業(yè)級產(chǎn)品中,中精度MEMS-IMU可應(yīng)用于精密農(nóng)業(yè)、工業(yè)自動化、大型醫(yī)療設(shè)備、機器人、儀器儀表、工程機械等。還記得,Atlas高端類人機器人驚人的平衡感嗎?那個摔倒了還可以自己爬起來的神奇機器人,其超強的平衡感要部分歸功于其體內(nèi)的IMU。說起在工業(yè)領(lǐng)域使用的慣性傳感器,大多以模塊形式出現(xiàn),對于應(yīng)用于工業(yè)級芯片級產(chǎn)品,還必須進行處理,包括軟件和硬件電路,以及對不同工業(yè)環(huán)境的適應(yīng)性,大多數(shù)要求價格適中,精度要求要優(yōu)于應(yīng)用于消費電子類的傳感器。
Atlas高端類人機器人中精度MEMS-IMU:加速度計的量程選擇比較寬1~500g,分辨率1mg~3mg,陀螺儀量程大多250°/s以內(nèi),零偏在50°/h~200°/h范圍內(nèi)。(3)高精度MEMS-IMU高精度IMU可解決復(fù)雜航空航天系統(tǒng)中慣性傳感器的部署難題,如航空電子系統(tǒng)所采用的IMU是ADIS16485/8,滿足一切性能和可靠性目標。高精度MEMS-IMU主要用于軍用級和宇航級產(chǎn)品,要求高精度、全溫區(qū)、抗沖擊等。主要應(yīng)用于通訊衛(wèi)星無線、導(dǎo)彈導(dǎo)引頭、光學(xué)瞄準系統(tǒng)等穩(wěn)定性應(yīng)用、飛機和導(dǎo)彈飛行控制、姿態(tài)控制、偏航阻尼等控制應(yīng)用、以及中程導(dǎo)彈制導(dǎo)、慣性GPS導(dǎo)航等制導(dǎo)應(yīng)用、遠程飛行器、船舶儀器、戰(zhàn)場機器人等。軍工級或宇航級的MEMS-IMU精度要求高、工作溫度范圍寬,某些兵器產(chǎn)品要求抗沖擊能力強,尺寸要比光纖和機械類產(chǎn)品更小。
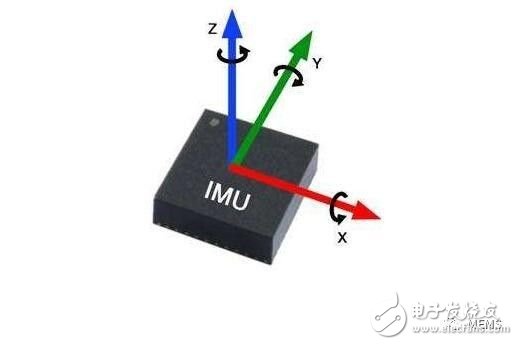
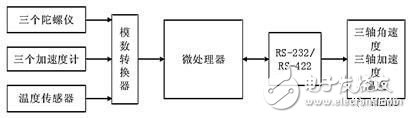
ADIS16488慣性測量單元高精度MEMS-IMU:加速度計量程范圍比較寬1g~5000g,分辨率要0.1mg~1mg范圍內(nèi),甚至更高。陀螺儀量程要求范圍寬20°/s~1000°/s,頻率響應(yīng)高,要求在50Hz~1000Hz之間,零偏穩(wěn)定性在1°/h~50°/h范圍內(nèi)。如今MEMS-IMU正在向更高集成度和更高精度的方向發(fā)展。其中MEMS陀螺儀的發(fā)展極為明顯,其性能也在接近或者已經(jīng)達到戰(zhàn)術(shù)級應(yīng)用的水平;而MEMS加速度計是商業(yè)市場化最為成功的,其精度已經(jīng)能夠滿足戰(zhàn)略導(dǎo)彈的應(yīng)用要求,但目前MEMS加速度計的精度水平還不是很高。MEMS慣性器件在結(jié)構(gòu)設(shè)計、制作工藝、集成化、電路設(shè)計、封裝及試驗系統(tǒng)等方面還存在許多的問題,需要進一步解決。MEMS慣性傳感器的研究熱點和發(fā)展方向是精度高、環(huán)境適應(yīng)能力強和多傳感器集成化等,其中MEMS慣性傳感器件的設(shè)計和制造元器件所需的生產(chǎn)工具也是一個重要的研究方向。IMU簡介IMU,慣性測量單元,是一種使用加速度計和陀螺儀來測量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。狹義上,一個IMU 內(nèi)在正交的三軸上安裝陀螺儀和加速度計,共 6 個自由度,來測量物體在三維空間中的角速度和加速度,這就是我們熟知的“6軸IMU”;廣義上,IMU可在加速度計和陀螺儀的基礎(chǔ)上加入磁力計,可形成如今已被大眾知曉的“9軸IMU”。其中加速度計檢測物體在載體坐標系統(tǒng)獨立三軸的加速度信號,而陀螺儀檢測載體相對于導(dǎo)航坐標系的角速度信號,測量物體在三維空間中的角速度和加速度,并以此解算出物體的姿態(tài)。IMU在導(dǎo)航中的核心價值無可替代,為了提高其可靠性,還可以為每個單軸配備更多種類的傳感器。為保證測量準確性,一般IMU要安裝在被測物體的重心上。
一種IMU原理示意圖影響IMU性能的主要因素
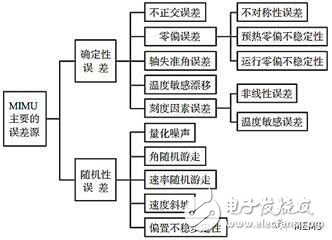
MEMS-IMU主要誤差源將IMU的誤差源歸類后主要有以下四類:(1)加速度計影響因素在IMU中,加速度計對其的影響主要體現(xiàn)在加速度計的精度和穩(wěn)定性兩個方面。其中加速度計的高精度是為保障后續(xù)數(shù)據(jù)處理的精確性,加速度計的穩(wěn)定性則是直接影響IMU能否發(fā)揮出正常性能的關(guān)鍵因素。其中加速度計精度可采用6位置靜態(tài)標定法。將IMU器件安裝完畢后,按照下圖的六個位置分別收集三個方向加速度計的數(shù)據(jù)。
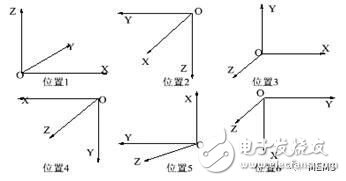
加速度計靜態(tài)六位置(2)陀螺儀影響因素陀螺儀對IMU的影響主要體現(xiàn)在其精確性上,其精確性將直接影響姿態(tài)解算的優(yōu)劣程度,換句話說,最后IMU能否正確感知產(chǎn)品的姿態(tài)就是依靠陀螺儀的精確性。陀螺儀誤差模型與加速度計類似,采用的標定方法是動態(tài)旋轉(zhuǎn)的,將IMU置于單軸轉(zhuǎn)臺中,令每個軸向上、向下,并分別以50°/s、100°/s、150°/s、200°/s、250°/s的轉(zhuǎn)速轉(zhuǎn)動正反方向,并收集足夠的數(shù)據(jù)。
陀螺儀的動態(tài)標定除精確性外,MEMS陀螺的性能指標主要有:標度因數(shù)(與比例因子互為倒數(shù))、標度因數(shù)非線性、零偏、零偏穩(wěn)定性、零偏重復(fù)性。這些指標系統(tǒng)的反映了陀螺儀的性能,因此有必要對其進行相應(yīng)的測試,掌握其具體的指標參數(shù)。(3)溫度影響因素MEMS慣性器件在溫度發(fā)生變化時,其精度會產(chǎn)生較大的差異,一般情況下,慣性器件的工作環(huán)境不可能是恒溫環(huán)境,尤其是陀螺的精度受到嚴重影響,因此溫度的影響不能忽略,以陀螺儀為例,置放慣性器件于恒溫轉(zhuǎn)臺中試驗,并在不同溫度下收集數(shù)據(jù)。
微慣性器件的溫度試驗(4)IMU產(chǎn)品化后主要影響因素A.信噪比低信噪比低會造成使用IMU的產(chǎn)品不敏感,因此最棘手的問題便是降噪。一般此種情況可利用小波降噪,對信號進行消噪實際上是抑制信號中的無用部分,增強信號中的有用部分的過程。慣性器件常用的消噪過程為:a. 信號的小波分解,選擇一個合適的小波并確定分解的層次,然后進行分解計算;b. 小波分解高頻系數(shù)的閾值量化,對各個分解尺度下的高頻系數(shù)選擇一個閾值進行軟閾值量化處理;c. 小波重構(gòu),根據(jù)小波分解的最底層低頻系數(shù)和各層分解的高頻系數(shù)進行一維小波重構(gòu)。其中最關(guān)鍵的是如何選擇閾值以及進行閾值量化處理,它直接關(guān)系信號消噪的質(zhì)量。B.漂移大/延遲大對于信號延遲問題,MEMS的常用器件都有存在,在IMU產(chǎn)品中極為明顯。國外研究機構(gòu)提出利用慣性誤差旋轉(zhuǎn)調(diào)制技術(shù),來解決延遲問題。慣性誤差旋轉(zhuǎn)調(diào)制技術(shù)實質(zhì)上是一種誤差自補償技術(shù),利用IMU周期性轉(zhuǎn)動完成對慣性器件慢變誤差的調(diào)制,是在現(xiàn)有器件精度的條件下實現(xiàn)更高導(dǎo)航精度的有效方法。采用誤差調(diào)制技術(shù)的慣性導(dǎo)航系統(tǒng)結(jié)構(gòu)發(fā)生了變化,旋轉(zhuǎn)機構(gòu)的存在導(dǎo)致陀螺儀和加速度計與載體不再固連,但解算依然采用捷聯(lián)算法,因此這種慣性導(dǎo)航系統(tǒng)被稱為旋轉(zhuǎn)調(diào)制型捷聯(lián)慣性導(dǎo)航系統(tǒng)。
-
IMU
+關(guān)注
關(guān)注
6文章
298瀏覽量
45678
原文標題:昔日導(dǎo)航“心臟”已成為智能生活的明日之星:慣性測量單元(IMU)
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
傳感需求多變,MEMS器件集合體IMU如何應(yīng)對
“MEMS的應(yīng)用與機遇”研討會探索MEMS廣闊市場
商業(yè)銀行是怎樣探索區(qū)塊鏈的路程的
ADIS16505: Precision, Miniature MEMS IMU Data Sheet







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論