 唯樣代理IGBT 還是 SiC ? 英飛凌新型混合功率器件助力新能源汽車實現高性價比電驅
唯樣代理IGBT 還是 SiC ? 英飛凌新型混合功率器件助力新能源汽車實現高性價比電驅
近幾年新能源車發展迅猛,技術創新突飛猛進。如何設計更高效的牽引逆變器使整車獲得更長的續航里程一直是研發技術人員探討的最重要話題之一。高效的牽引逆變器需要在功率、效率和材料利用率之間取得適當的平衡。
當前新能源汽車牽引逆變器的功率半導體器件幾乎都是基于單一的硅基(Si) 或者碳化硅基(SiC)。Si IGBT 或寬帶隙 SiC MOSFET功率半導體具有不同的性能特點,可以適合不同的目標應用。單一性質的IGBT器件或SiC器件在逆變器應用中很難同時滿足高效和成本的要求。
如今越來越多的設計人員希望以創造性的方式使用和組合半導體材料,以尋找Si和SiC的最佳平衡點。創新方法挑戰了以往某些應用被鎖定在特定一種半導體材料上的既定觀念。例如,過去人們認為逆變器的設計必須使用相同的半導體材料。現在,融合技術正在將為新的設計可能性鋪平道路。英飛凌將不同的半導體材料創新性地結合到新型逆變器設計中,在成本和性能優化方面實現市場驅動的平衡。
本文將探討英飛凌在混合式功率半導體創新技術方面為高效牽引逆變器在效率、成本和可持續性之間尋找更好的平衡點。
SiC mosfet 和Si IGBT 的性能對比
在探討新能源車的牽引逆變器功率器件首選是SiC還是Si 器件之前,我們先簡單對比SIC MOSFET 和 IGBT 基本特性:
1
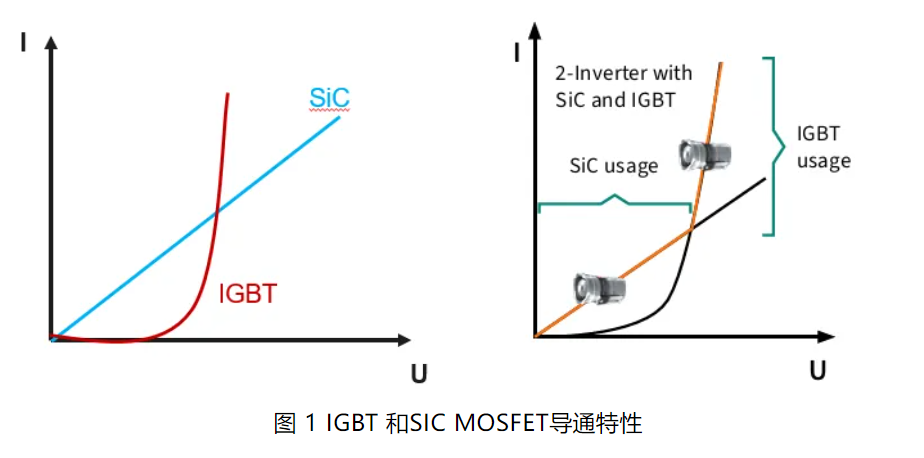
從導通特性看,由于不同的物理結構,IGBT與SIC MSOFET具有不同的輸出特性曲線,如下圖所示。SiC MOSFET導通特性表現得更像一個電阻輸出特性,而IGBT 則表現出一個非常明顯的拐點(Knee Voltage)特性。這種技術上的差異即表現出兩種器件不同的導通損耗特點。在電流較小時,SiC mosfet 具有更小的導通損耗,當電流較大(超過曲線交點)時,IGBT 的導通損耗則更小。
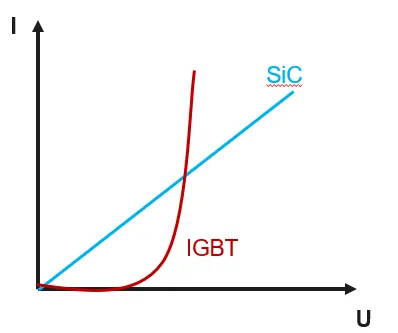

圖 1 IGBT 和SIC MOSFET導通特性
2
從開關特性看,IGBT屬于雙極性器件,在關斷時由于少子的復合肯定會造成拖尾電流,使其開關損耗特性較差。而SiC MOSFET具有更快的開關速度,且沒有拖尾電流, 所以其開關損耗對比IGBT具明顯優勢。
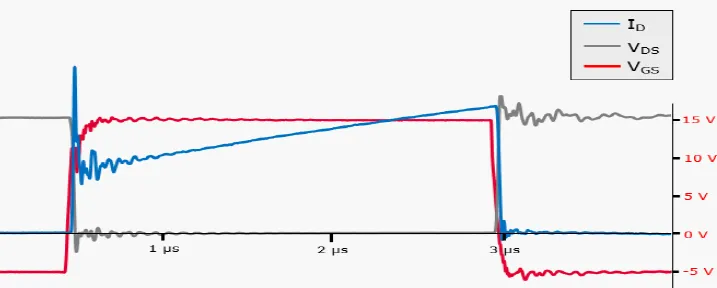
SiC mosfet 開關特性

IGBT 開關特性
圖 2IGBT 和SIC MOSFET開關特性
綜上,SiC MOSFET器件并不是在所有負載條件下,都具有壓倒性的性能優勢。這也就很容易理解在選擇SiC mosfet 還是Si IGBT 時需要考慮一個盈虧平衡點。
新能源車動力配置布局
新能源電動汽車的性能分配有多種選擇,主流方案就是在主驅動軸和副驅動軸之間進行分配。在我們的示例中(圖3),主驅動軸始終處于嚙合狀態,滿足低功率常規續航駕駛模式,副驅動軸可提供額外扭矩,實現四輪驅動能力和最佳加速性能。當前市場上可以看到的配置基本分為 1)主驅動軸和輔驅動軸均采用了SiC功率器件; 2)主驅動軸采用高性能SiC 功率器件,而輔驅動軸則采用更具性價比的IGBT功率器件。這也是當今電動汽車的典型配置,這些方案均是建立在逆變器中使用單一的功率器件,較難做到效率和成本之間的平衡。在評估上述方案的優劣之前,我們需要先從電動汽車的駕駛工況來分析。真實的駕駛工況對牽引逆變器的需求是什么?

圖3 雙電驅電動汽車動力配置
標準駕駛工況WLTP 與峰值性能需求
全球輕型汽車測試程序(WLTP)的駕駛周期反映了接近真實的駕駛任務。通過標準化,它為電動車制造商和消費者提供了比較不同車輛效率的參考值。
對于電動汽車來說,它以一定距離的能量消耗來表示,比如100 公里消耗10 千瓦,或者以"每加侖汽油當量英里數"(MPGe)來表示,這一指標也可以與傳統內燃機汽車進行比較。

圖4 全球統一輕型汽車測試程序(WLTP)
代表典型的駕駛曲線
WLTP 駕駛循環(圖4)與其他任務剖面圖類似,由23.3 公里距離內1800 秒的各種加速、減速和性能周期組成。鑒于駕駛方式的不同,對于WLTP 是否反映了真實世界的駕駛情況存在不同意見。但它適合作為評定汽車效率的依據。WLTP 任務描述允許電動車制造商計算特定車輛所需的電機性能及其關鍵參數,如重量、風阻、駕駛效率、加速度和能量回收。
從上面的WLTP 典型的駕駛工況曲線來看,超過105km/h高速工況需求的時間占比大約只有10%左右,而大約3/4的時間內車速需求是小于75km/h。
以一輛重1500 千克的汽車為例,計算出的數值繪制成直方圖(圖5)。該圖表顯示,電動車牽引逆變器的最大輸出功率需要約50 KW。這說明對于電動汽車的加速、達到峰值速度所需的實際功率是非常小的。在發電模式下(見圖5 中的紫色條),最大功率約為28 KW。
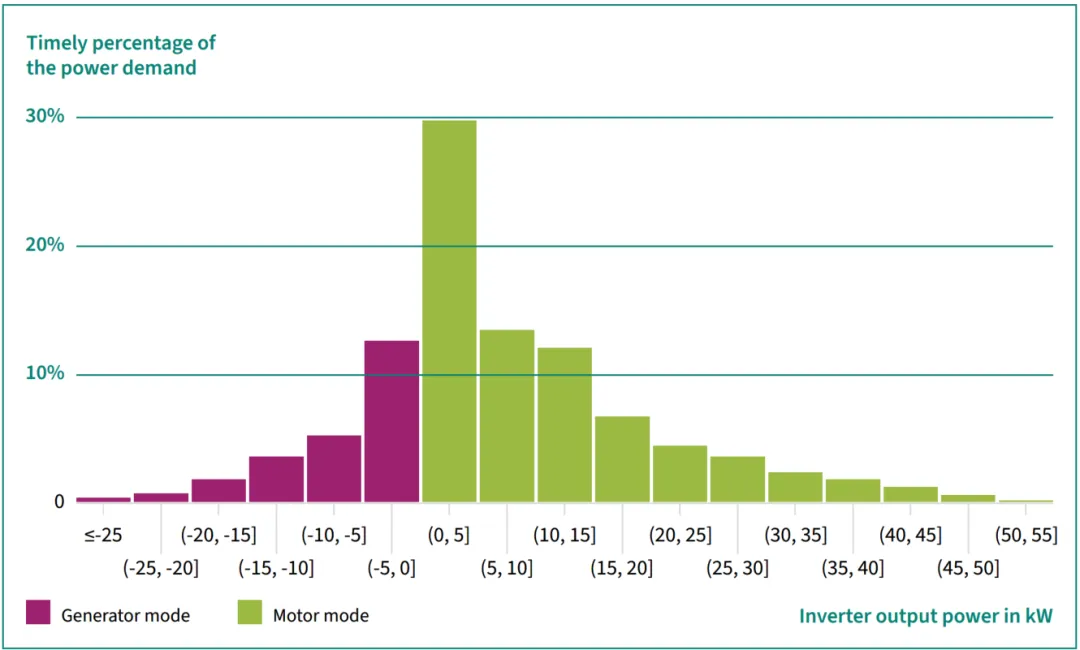
圖5 WLTP 周期內牽引逆變器輸出功率
隨時間變化的情況
性能與成本
——Si還是SiC,主驅逆變器如何選擇?
我們知道,牽引逆變器對電動汽車的整體性能和效率起著決定性作用。更仔細地審視逆變器的設計,成本效益和合理的額定功率以及合理的效率水平是面向更廣泛市場的電動汽車取得成功的關鍵因素。在這個層面上,簡單地說,我們要評估的是整個驅動任務剖面的最低性能和所需的峰值性能。
這些分析將可以更好地讓我們理解哪種半導體技術(Si 或SiC)更適合。
在前面的例子中,80 KW的電機可以執行標準的WLTP 驅動循環,從而滿足大多數駕駛要求。如果使用碳化硅來提高汽車的額定功率,那么多余的功率在大多數情況下都會被"閑置"。但是在某些情況下,80 KW可能不足以實現"有趣動感"(運動型)的駕駛體驗。因此,可以添加一些硅來提高車輛的峰值性能。例如,硅部件能夠額外提供160千瓦的功率。這將使汽車具有非常動感的駕駛加速性能。在另一方面,這些數值可以縮減到40 kW SiC 和80 kW Si,從而實現120kW 的入門級電動汽車功率。
至于如何在牽引逆變器內分配Si 和SiC 芯片,取決于研發設計師。鑒于有多種選擇,深入研究一下電力傳動系統的配置是很有意義的。
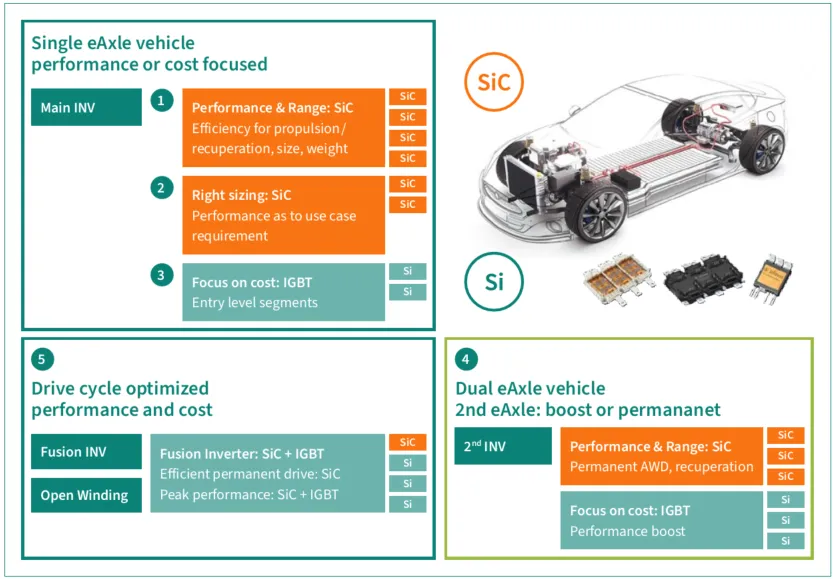
圖6 適合不同需求的電力傳動系統的配置
對于動力傳動系統,尤其是牽引逆變器,不同的技術方案具有不同的效率、性能和成本優勢,如下1~5配置。
- 單電驅,高性能和長續航要求---大功率碳化硅逆變器
- 單電驅,適當調整車輛性能---小功率碳化硅逆變器
- 單電驅,成本優化的解決方案---IGBT逆變器
- 雙電驅,高性能和長續航要求---SIC逆變器作為主驅續航,IGBT 逆變器作為輔驅 提供加速動力
- 新型電驅,成本優化,高性能和長續航要求----單逆變器中融合SiC+IGBT,SiC維持高效率續航運行,SiC+IGBT 提供峰值搞性能
雙電驅的優點眾所周知,下圖7 對此進行了總結。其設計的初衷,SiC在中小功率等級使用時具有更低的損耗、更高的效率,而IGBT在大功率輸出時相對更有優勢。為了充分發揮SiC和IGBT 各自的優點,雙電驅可以采用不同半導體器件進行搭配。
- 主驅使用SiC, 保持持續運行且覆蓋90%以上的WLTP驅動周期。
-
輔驅采用IGBT,提供額外的扭矩,以提供4輪驅動能力和最大性能。
在這種配置(圖6中 配置2 + 配置3 的組合)中,使用了Si 和SiC 技術,但部署在不同的電驅上。

圖7 不同工況下的Si(IGBT) vs SiC 功耗性能對比
電動車系統的牽引逆變器中Si和SiC 布局
融合技術?——將Si和 SiC融合在同一個牽引逆變器
上個章節講到電動汽車的性能分配有多種選擇,最明顯的就是在主驅動橋和副驅動橋之間進行分配。在我們的示例中(圖8),配置1 和2 在后軸或前軸上使用了全部的碳化硅。而配置3 和4 則使用了融合技術牽引逆變器。這些方案在效率和成本之間可以實現良好的平衡。在融合技術中,硅芯片和碳化硅芯片在同一牽引逆變器中并行運行。為了理解為什么融合技術牽引逆變器的效率比其他配置更高,讓我們更深入地了解一下不同的驅動情況。

圖8 采用融合技術牽引變流器的四種示例配置,
可提高推進和回收效率以及峰值性能
我們可以仔細觀察融合技術牽引逆變器內部的能量流(圖9)。在標準負載下,后軸上的SiC 用于加速,而前后軸上的SiC(66% 至33% 的份額)用于平穩減速。這種負載情況與大多數駕駛條件和WLTP 測試條件相當,加速和減速完全由SiC 和所需的電驅控制。當功率需求達到更高峰值水平時,加速時需要使用額外的Si。由于Si在高負載時具有更高的效率,因此此處僅使用Si進行能量回收。
總而言之:融合技術牽引逆變器最有效地利用了不同半導體功率器件的不同優勢,從而可以為高效、經濟的電動汽車做出了的貢獻。
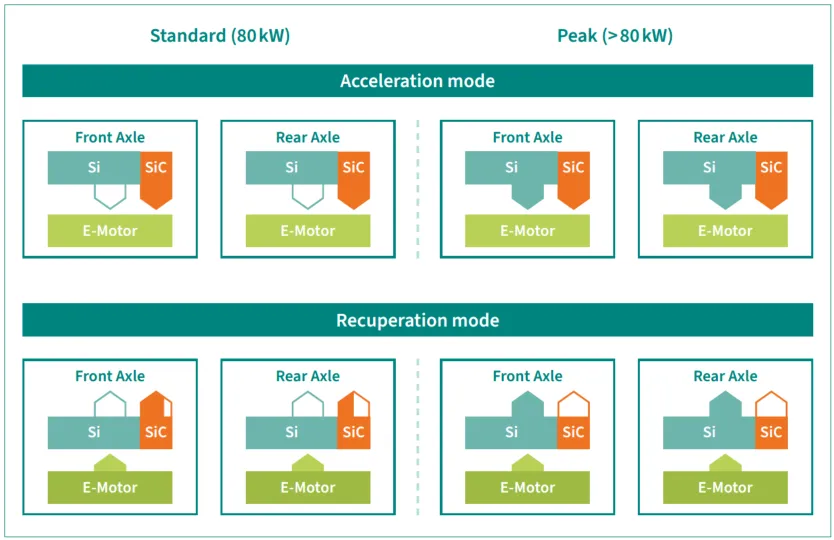
圖9SiC適配常規動力驅動/峰值性能啟用Si
不同的驅動控制策略實現融合技術
在牽引逆變器中的應用
根據上述原理,這些技術可以通過不同的組合方式實現不同的目標。那如何考慮其驅動策略?
在只使用一種半導體技術的標準牽引逆變器中,由于只使用了Si 或SiC,因此不需要特別的驅動策略。但融合技術牽引逆變器采用了Si和SIC并聯運行,因此也需要特殊的驅動控制策略
下圖概述了融合技術牽引逆變器的不同運行模式下, SiC 和Si 半導體的不同驅動運行方式。

圖10融合技術的不同驅動控制策略
(Ex2G、S1G、S2G、In2G)
獨立運行("Ex")
第一種選擇是獨立運行模式,即單一時刻只有一種半導體(Si或SiC)運行。以上面的示例參考,SiC 專門用于所有低于 80 kW 的功率需求。如果車輛要求牽引逆變器提供超過 80 kW 的輸出功率,SiC MOSFET將被關閉,取而代之的是 Si IGBT運行。示例中逆變器中的碳化硅部分對最大輸出功率沒有貢獻,這顯然是該方案的主要缺點。要實現 獨立運行"排他性操作",則需要兩個柵極信號("Ex2G")來獨立控制兩種半導體器件。
并行控制("S")
在這里,Si和SiC總是并聯使用。這克服了獨立運行模式的缺點。一個柵極信號用于在兩種技術之間切換。柵極路徑的調整對于匹配開啟和關閉行為以及實現適當的瞬態行為十分必要。必須通過設計和技術確保所有獨立開關之間的電流共享。然而,以Vds電壓低于0.7 V 為例,碳化硅區域將傳導大部分電流,超過這一限制后,硅將增加其電流份額。通過設置芯片區域的尺寸,可以優化這些值,以實現效率和驅動能力需求。
并行模式有兩種實施方案——單柵極方案(S1G)或雙柵極方案(S2G)。由于兩種半導體同時運行,一個柵極驅動就足夠了。在調整技術時,設計人員可以自由選擇從微控制器發出一個PWM 信號,然后通過一個柵極驅動器和外部適配電路將PWM輸送到兩個柵極(S2G);或者只使用一個柵極驅動器和一個柵極引腳(S1G),而在功率模塊中對驅動信號進行獨立匹配。對于用戶來說,S1G 是一種相當方便的解決方案,但與S2G 相比,改變參數的自由度較低。
單獨控制("In")
第三種方案需要獨立控制兩種半導體芯片。這需要為每組開關提供兩個PWM 信號。這種模式的優點是可對兩種開關進行優化調整,并可在控制策略內在線自由調整PWM 模式。由于SiC的開關速度可能比Si快,因此可以調節不同的導通和關斷時刻,以優化瞬態電流分擔,最大限度地減少每種半導體芯片的過載。根據使用情況,由此產生的操作可在獨占模式和同步模式之間無縫切換。在發生故障時,甚至可以實現一種"跛行回家"模式,即關閉一種半導體芯片的運行,系統切換到剩余的半導體芯片運行,做到"跛行回家"。
單獨控制模式需要兩個柵極(In2G),因此設置更為復雜,但另一方面,它充分利用了融合技術牽引逆變器的優勢。它還提供了兩種技術之間的冗余(故障切換)
不同的實施模式有何不同?
圖10 顯示了不同的融合技術牽引逆變器驅動策略的實現方法,使我們能夠識別和比較這些不同。圖11 總結了每種實施方法的優勢和挑戰。如圖所示,每種控制策略在某些用例中都具有優勢和缺點。合適的產品和工程能力往往決定了實施的可行性。基于這些邊界條件,不同的細分市場將可以采用不同的融合技術牽引逆變器控制策略。
單獨控制模式(In2G)是一個不錯的驅動策略,因為它具有充分的靈活性,為高度復雜的軟件策略打開了大門,可優化不同半導體開關技術的電氣效率、BOM、成本和使用壽命等變量。這種模式甚至可以支持"故障運行"功能。因此,融合技術牽引逆變器的優勢不僅限于最初明顯的成本和材料可用性優勢,還能為未來的新能源汽車提供新的技術方向。
Si和SiC融合技術將是一種非常有效的解決方案,可以瞄準需要在效率、成本和可用性之間取得良好平衡的細分市場。

圖11不同融合技術牽引逆變器實現總結與比較
英飛凌目前正在擴大其產品組合,以充分發揮融合技術在逆變器應用中的優勢。從Si 和SiC 裸芯片到分立器件、功率模塊,再到支持兩種技術的混合模塊,英飛凌的產品范圍十分廣泛。
英飛凌第一款750VSi/SiC 混合功率模塊已經面向市場推廣。英飛凌利用其最新Si和SiC芯片開關性能良好的匹配特性,第一款 混合功率模塊可以采用常規單通道驅動模式,不增加系統控制復雜性 同時電控系統的性能可以獲得提升。如下圖所示,根據仿真175KW 400V BEV 電驅平臺 采用英飛凌混合模塊對比采用純IGBT 模塊,WLTP工況駕駛里程可以提高2.9% 。
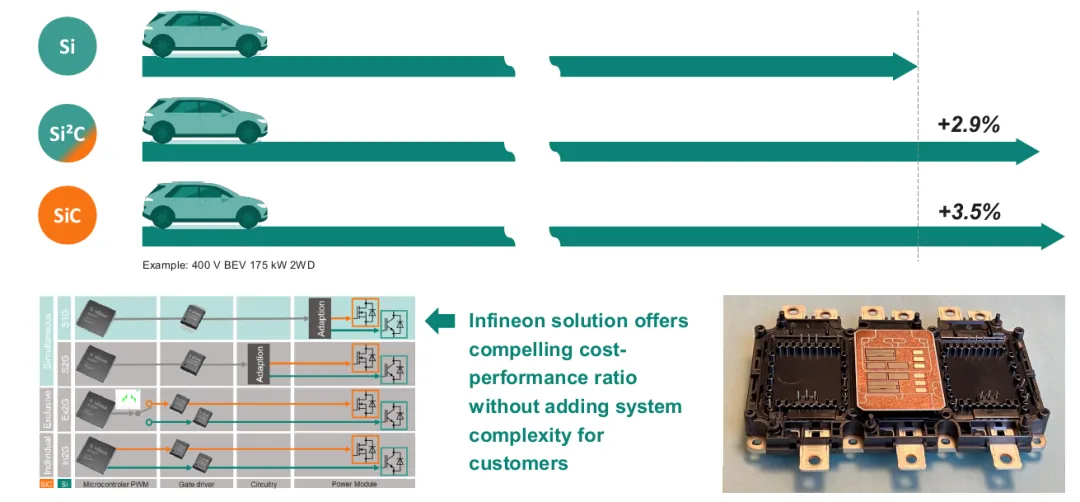
圖12英飛凌混合模塊
審核編輯 黃宇
-
英飛凌
+關注
關注
66文章
2153瀏覽量
138441 -
新能源汽車
+關注
關注
141文章
10427瀏覽量
99281 -
IGBT
+關注
關注
1265文章
3762瀏覽量
248363 -
SiC
+關注
關注
29文章
2771瀏覽量
62466
發布評論請先 登錄
相關推薦
IGBT還是SiC?英飛凌新型混合功率器件助力新能源汽車實現高性價比電驅
SiC技術引領中國新能源乘用車功率器件國產化新篇章

英飛凌混合反激控制器典型產品及功能

英飛凌為麥田能源提供功率半導體,助力提升儲能應用效率

新能源汽車蓬勃發展,IGBT供應緊張下的技術創新與產能擴張

【換道賽車:新能源汽車的中國道路 | 閱讀體驗】 新能源到底新在何處?新能源在國內如何發展?
新能源汽車需要怎樣的主驅逆變器?汽車廠商又如何選擇合適的主驅方案?

【換道賽車:新能源汽車的中國道路 | 閱讀體驗】新能源汽車值得買嗎?未來又會如何發展
英飛凌與威邁斯加強合作,為電動汽車提供節能經濟的快速充電服務







 工商網監
工商網監
評論