 PNP傳感器的工作原理
PNP傳感器的工作原理
PNP傳感器的工作原理概述
1. 基本構成與結構
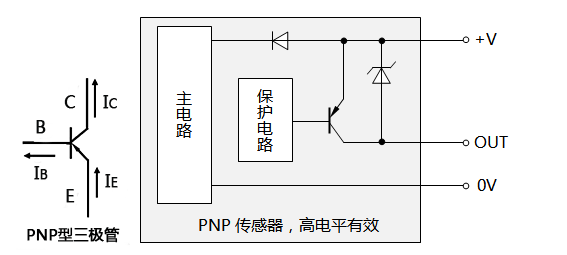
PNP傳感器的主要構成部分是一個PNP型晶體管,這種晶體管由一塊P型半導體夾在兩塊N型半導體之間形成。PNP晶體管的三個極分別為發射極(Emitter, E)、基極(Base, B)和集電極(Collector, C)。在PNP傳感器中,這三個極的接線方式和功能至關重要。
2. 工作原理詳解
PNP傳感器的工作原理可以概括為以下幾個步驟:
(1)靜態狀態
- 在靜態狀態下(即無外部信號觸發時),PNP晶體管的基極電流很小,不足以使晶體管進入飽和狀態。此時,集電極電流也較小,輸出信號處于低電平狀態。
(2)信號觸發
- 當外部信號(如被檢測物體的接近、光線的變化等)作用于PNP傳感器時,該信號會轉化為電信號并作用于基極。在PNP型晶體管中,由于發射極和集電極均為P型半導體,因此當基極接收到正信號時(相對于發射極而言),會形成一個正向偏置的發射結,使得電子從發射極流向基極。
(3)電流放大
- 隨著基極電流的增大,PNP晶體管進入放大狀態。在放大狀態下,基極電流的變化會引起集電極電流更大幅度的變化。這是因為PNP晶體管內部存在電子和空穴的復合過程以及載流子的擴散和漂移運動,這些過程共同作用使得集電極電流得到放大。
(4)信號輸出
- 放大后的集電極電流被輸出到外部電路,用于控制其他設備或執行相應的操作。在PNP傳感器中,由于集電極連接到電源的正極(或通過上拉電阻連接到正極),因此當集電極電流增大時,輸出信號為高電平狀態。
3. 應用場景與優勢
PNP傳感器因其靈敏度高、響應速度快、精度高等優點,在工業自動化、機器人、汽車、家電等領域得到廣泛應用。例如,在工業自動化生產線上,PNP傳感器可以用于檢測工件的到位情況、控制機器人的運動軌跡等;在機器人領域,PNP傳感器可以用于感知環境、實現避障等功能;在汽車行業中,PNP傳感器則可以用于檢測車輛的速度、距離等信息。
此外,PNP傳感器還具有以下優勢:
4. 接線與注意事項
在接線過程中,需要注意以下幾點以確保PNP傳感器的正常工作:
- 電源極性 :確保PNP傳感器的發射極連接到電源的正極或正電壓。
- 信號線連接 :將基極連接到控制信號源或觸發信號源;將集電極連接到輸出電路或負載。
- 負載匹配 :根據PNP傳感器的輸出電流和電壓特性選擇合適的負載以確保電路的穩定性和可靠性。
- 電氣安全 :在接線過程中應遵守電氣安全規范,確保電源已關閉并使用絕緣工具進行操作以防止觸電。
5. 總結
PNP傳感器的工作原理基于半導體PN結的特性以及晶體管的放大作用。通過外部信號的觸發和內部電流的放大過程,PNP傳感器能夠將微弱的信號轉化為強大的輸出信號以控制其他設備或執行相應的操作。在工業自動化、機器人、汽車等領域中,PNP傳感器發揮著重要作用并展現出其獨特的優勢。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2548文章
50685瀏覽量
752024 -
半導體
+關注
關注
334文章
27014瀏覽量
216335 -
晶體管
+關注
關注
77文章
9635瀏覽量
137852
發布評論請先 登錄
相關推薦
電量隔離傳感器工作原理
電量隔離傳感器工作原理
摘要:本文主要介紹電量隔離傳感器的基本工作原理. 關鍵詞:電量隔離傳感器/變送器,監控系統,抗干擾技術 一, 概述
發表于 01-07 12:56
?1141次閱讀
NPN傳感器和PNP傳感器的區別是什么
很多人搞不懂NPN傳感器和PNP傳感器的區別,或者即使掌握了這兩者的區別,也不知道如何應用,本文就和大家聊聊NPN傳感器和PNP
如何正確選擇使用PNP和NPN型傳感器?
將詳細介紹PNP和NPN型傳感器,并提供選擇這兩種傳感器類型的一些建議。 首先,讓我們了解一下PNP和NPN型傳感器的基本概念。這兩種
PNP傳感器在汽車領域有哪些應用
PNP傳感器是一種基于半導體材料PN結構的電路元件,能夠檢測物體的存在或運動狀態,并將檢測到的信號轉換為電信號輸出給控制器或處理器。在工業自動化、機器人、汽車、家電等領域中,
PNP傳感器輸出信號的特點和工作方式
PNP傳感器的輸出信號是其工作過程中的關鍵環節,它決定了傳感器如何與外部電路或控制系統進行交互。以下將詳細解釋PNP





 工商網監
工商網監
評論