") 基于無人機高光譜遙感的河湖水環(huán)境探測
基于無人機高光譜遙感的河湖水環(huán)境探測
本研究基于實測和無人機高光譜遙感反射率數(shù)據(jù)計算水體顏色參量并反演水質(zhì)參數(shù),利用Hueangle對水體進行分類,通過水體顏色參量和水質(zhì)參數(shù)反演結(jié)果,分析上海市崇明島河湖小水體的水體顏色變化,進而識別河湖水環(huán)境中的疑似污染水體。
一、引言
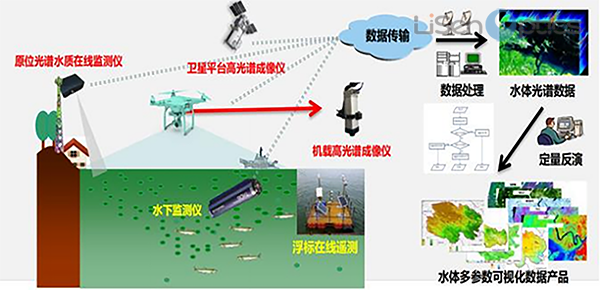
河湖水環(huán)境監(jiān)測是人類一直以來高度重視的環(huán)境問題。相對于傳統(tǒng)監(jiān)測手段,遙感技術(shù)具有快速、大面積同步觀測、周期性等特點,對于獲取長期、大范圍河湖水環(huán)境的時空變化具有顯著優(yōu)勢。無人機遙感平臺搭載高光譜傳感器可以獲得高空間、高時間、高光譜分辨率的遙感數(shù)據(jù),利用該數(shù)據(jù)可實現(xiàn)狹長河道的長時間精準觀測,對于水環(huán)境的持續(xù)性遙感監(jiān)測以及緊急重點排查具有重要意義。本研究基于實測和無人機高光譜遙感反射率數(shù)據(jù)計算水體顏色參量并反演水質(zhì)參數(shù),利用Hueangle對水體進行分類,通過水體顏色參量和水質(zhì)參數(shù)反演結(jié)果,分析上海市崇明島河湖小水體的水體顏色變化,進而識別河湖水環(huán)境中的疑似污染水體。
研究區(qū)概況及數(shù)據(jù)源
2.1研究區(qū)概況
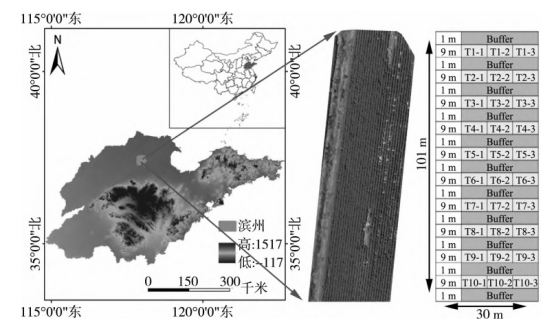
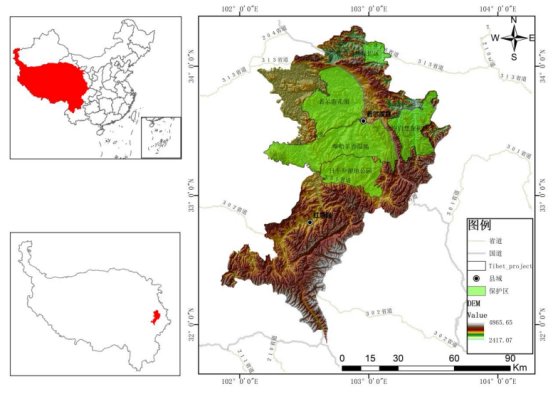
本研究選取上海市崇明島、青浦區(qū)大蓮湖作為無人機高光譜水環(huán)境監(jiān)測的主要研究區(qū)域。崇明島有2條市級河道(南橫引河、北橫引河)貫通南北形成環(huán)島運河。作為中國第一大生態(tài)島,島內(nèi)河道水體的水環(huán)境狀況直接影響崇明島的可持續(xù)發(fā)展和島內(nèi)人民的生活質(zhì)量。大蓮湖位于青浦區(qū)西部,北部為淀山湖,南部聯(lián)通黃浦江,是上海市黃浦江上游重要的水源保護區(qū)。
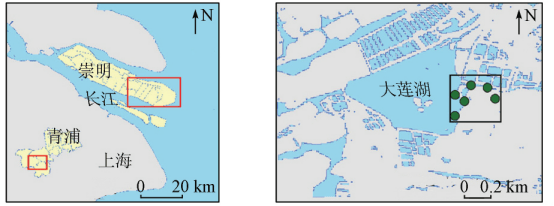
a)研究區(qū)域分布(b)大蓮湖采樣點及無人機飛行區(qū)域
C)崇明島采樣點及無人機飛行區(qū)域
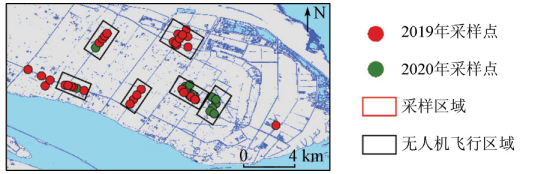
圖1研究區(qū)域及采樣點
2.2實測數(shù)據(jù)
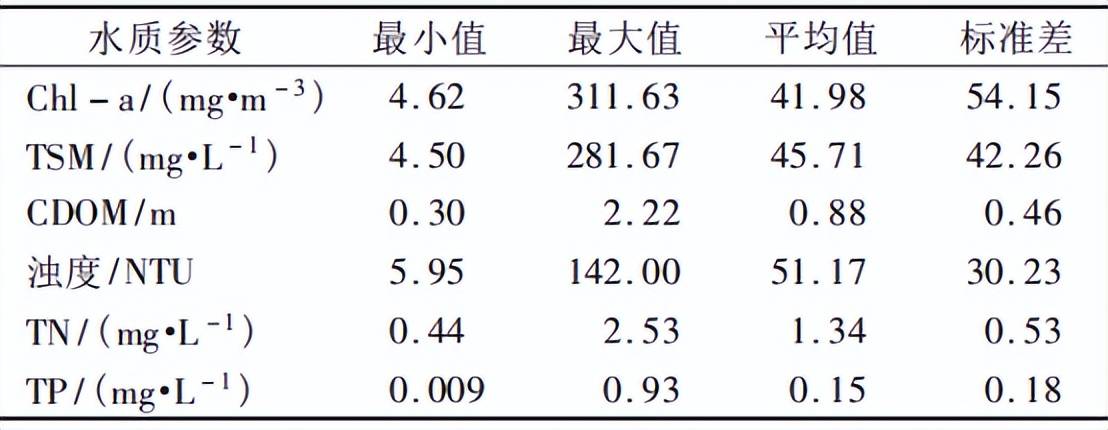
海市青浦區(qū)大蓮湖有8個采樣點,崇明區(qū)河道有86個采樣點,其中無人機高光譜數(shù)據(jù)覆蓋采樣點(包含同步測量和一小時間隔內(nèi)測量)35個。使用地物光譜儀根據(jù)水面以上測量方法,測量并計算得到采樣點水體的遙感反射率數(shù)據(jù)。使用便攜式濁度計現(xiàn)場測量濁度。根據(jù)《地表水和污水監(jiān)測技術(shù)規(guī)范》采集和保存水樣,帶回實驗室采用分光光度法測量葉綠素a濃度(Chl-a)、有色溶解有機物吸收系數(shù)(CDOM)、總氮(TN)和總磷(TP),對于內(nèi)陸水體選擇440nm處的吸收系數(shù)ag(440)作為CDOM的代表。采用稱重法測量水體總懸浮物濃度(TSM),實測采樣點各類水質(zhì)參數(shù)濃度分布如表1所示。
表1采樣點水質(zhì)參數(shù)濃度分布
本研究的無人機平臺為多旋翼無人機高光譜系統(tǒng),于2019年5月、9月、11月以及2020年5月在崇明島河道進行了無人機飛行,共獲取了11條崇明區(qū)重點關(guān)注河道的無人機高光譜數(shù)據(jù)。
高光譜數(shù)據(jù)處理
3.1遙感反射率測定
本研究基于反射率基法發(fā)展了一種無人機高光譜遙感反射率測定方法。該方法在無人機飛行河湖區(qū)域鋪設(shè)面積1m2的標準反射率為20%~30%的漫反射參考板,無人機經(jīng)過該區(qū)域時Rref(λ)和下行輻亮度Lref(λ),獲得太陽總輻照度。并根據(jù)水面以上光譜測量方法同步測量參考板上方的天空光輻亮度Lsky(λ)
3.2數(shù)據(jù)幾何矯正及降噪處理
本文采用快速傅里葉變換(FFT)去除高光譜影像的條帶噪聲,通過計算高光譜影像每列(條帶噪聲縱向分布)的條帶度量值(Si)評估條帶噪聲去除的效果。采用對噪聲敏感的最小噪聲分離法(MNF)實現(xiàn)光譜維噪聲的去除,利用局部均值和局部標準差法計算高光譜影像的信噪比和噪聲標準差,檢驗高光譜影像的降噪效果。

圖2無人機高光譜影像降噪流程及噪聲評估
圖2(a)顯示,利用FFT去除條帶后,整體Si有了明顯降低,低于條帶充分去除標準Si=0.005,證明該方法可以有效去除高光譜數(shù)據(jù)的條帶噪聲。圖2(b)顯示,MNF方法在光譜維上有效剔除了大量噪聲,得到了相對平滑的光譜曲線。圖2(c),(d)顯示,MNF去除噪聲后信噪比、噪聲標準差有大幅度改善,信噪比均值提升128%,噪聲標準差也顯著降低,平均值3.42×10-4(圖2(d));FFT去除條帶噪聲后,信噪比、噪聲標準差未顯著改善。
研究方法
4.1水體顏色參量計算
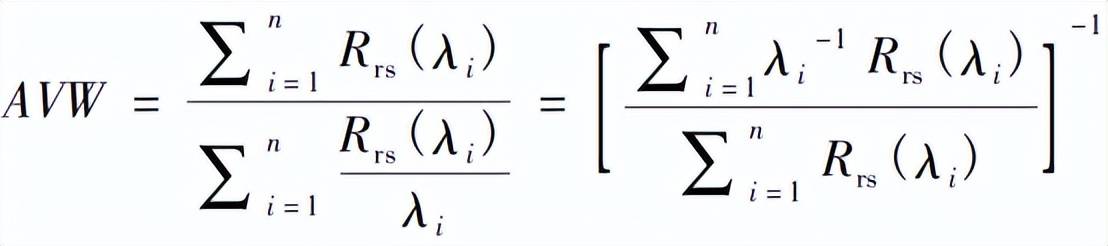
根據(jù)國際照明委員會(CIE)制定的CIE-XYZ顏色標準系統(tǒng)以及定量的描述顏色方法,基于本研究采集的無人機高光譜數(shù)據(jù),計算河湖水體的Hueangle。除此之外,還采用給定光譜的主導(dǎo)波長來表示。AVW因為包含了紫外和近紅外波段,對于顏色更藍或更紅的極端水域,相對Hueangle具有更高的變化范圍。故為了充分利用所獲得的高光譜信息來準確量化內(nèi)陸水體水色,本研究從水色主導(dǎo)波長的角度利用無人機高光譜全波段數(shù)據(jù)(400~800nm)計算AVW,計算公式為:
4.2水體色相分類
實地調(diào)查發(fā)現(xiàn),采樣區(qū)域水環(huán)境惡化主要表現(xiàn)為大量浮萍漂浮的綠色水體和污染源附近的黃棕色污染水體。參考設(shè)定Hueangle閾值對內(nèi)陸河湖水體的分類方法。從實測數(shù)據(jù)中選出19條不同類型水體(5條浮萍漂浮的綠色水體、7條一般水體和7條污染源附近黃棕色水體)的高光譜反射率曲線計算Hueangle。浮萍漂浮的水體呈綠色,具有植物光譜特征。污染源附近黃棕色水體主要組分為非色素顆粒物或有色溶解有機物,有色溶解有機物中含有的腐殖酸和富里酸隨著濃度的升高會使水體呈現(xiàn)黃褐色。根據(jù)所選不同水體的Hueangle值將水體分為綠色異常水體(Hueangle≤218°)、一般水體(218°≤Hueangle≤225°)、黃棕色異常水體共3類(Hueangle≥225°)(圖3)。
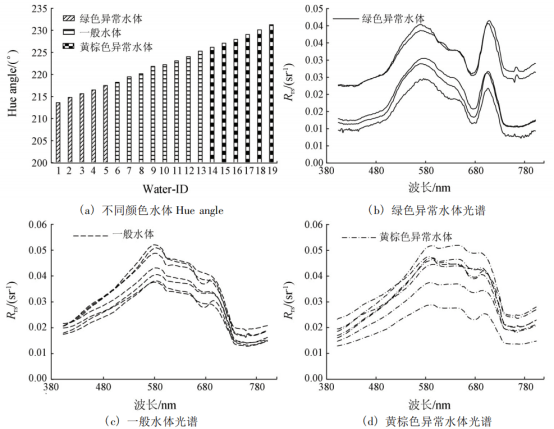
圖3不同類型水體光譜曲線及對應(yīng)Hueangle
4.3水質(zhì)參數(shù)
高光譜遙感反演通過對同步實測的遙感反射率與水質(zhì)參數(shù)(Chl-a,TSM,CDOM,濁度,TN,TP)進行統(tǒng)計分析,將不同水質(zhì)參數(shù)選擇相關(guān)性最高的波段或波段組合作為自變量,通過指數(shù)、冪函數(shù)、線性、多項式、偏最小二乘回歸等方法構(gòu)建反演模型(表2),通過R2和RMSE對模型的反演效果進行評估。
表2水質(zhì)參數(shù)反演模型
參考綜合營養(yǎng)指數(shù)(TLI)計算方法,基于Chl-a、TN、TP濃度估算河湖水體的TLI指數(shù)。通過水體的TLI指數(shù),將水體營養(yǎng)狀態(tài)分為貧營養(yǎng)(TLI<30)、中營養(yǎng)(30≤TLI≤50)、輕度富營養(yǎng)(50<TLI≤60)、中度富營養(yǎng)(60<TLI≤70)、重度富營養(yǎng)(70<TLI)5種狀態(tài)。
結(jié)果討論
5.1無人機-實測遙感反射率驗證
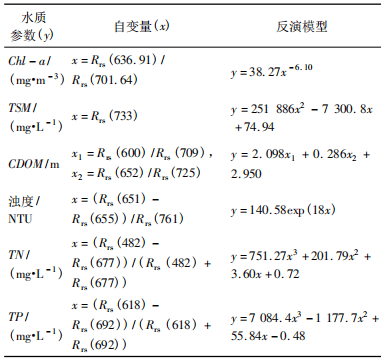
遙感反射率整體測定誤差表明:無人機高光譜計算的遙感反射率,各波段ε在7.7%~27.9%之間(平均值13.34%),RMSE為0.0034sr-1~0.0062sr-1之間(平均值0.0046sr-1),R在0.63~0.93之間(平均值0.83),整體誤差較低。由于該定標方法沒有準確去除光照強度變化對遙感反射率計算的影響,因此一小時間隔內(nèi)定標點的測定精度略低于同步定標精度(圖4)。考慮到大多數(shù)無人機由于載重局限,僅搭載一個向下探測的傳感器,在光照條件較為穩(wěn)定均勻的情況下,利用該測定方法獲得的遙感反射率精度較高,可以推廣應(yīng)用。
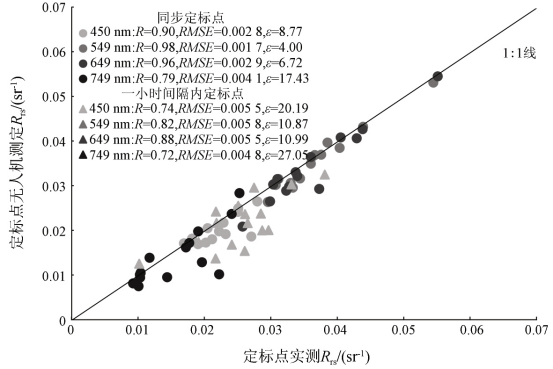
圖4無人機-實測Rrs對比驗證
5.2水體顏色參量與水質(zhì)參數(shù)反演效果評估
如圖,無人機高光譜反演的水體顏色參量基本與原位觀測高光譜反演值一致(Hueangle:R2=0.97,RMSE=0.86°;AVW:R2=0.93,RMSE=2.01nm)。相對于多光譜數(shù)據(jù)反演的水體顏色參量需要通過實測高光譜校正,無人機高光譜數(shù)據(jù)反演的水體顏色參量更加準確且避免了校正帶來的誤差。根據(jù)相關(guān)分析構(gòu)建的各類水質(zhì)參數(shù)反演模型(圖5(b)),從與實測數(shù)據(jù)的對比結(jié)果來看具有較高的反演精度。
圖5無人機高光譜反演水體顏色參量、水質(zhì)參數(shù)精度驗證
5.3河段水體色相分類
利用25條綠色異常水體、33條一般水體和17條黃棕色異常水體的原位觀測高光譜數(shù)據(jù)對Hueangle水體分類方法進行驗證,驗證精度分別為68%,91%和82%,證明該方法具有較高的分類精度。根據(jù)Hueangle閾值對2019-2020年崇明島重點河湖水體進行分類。圖6(a)顯示,2019年11月份的南橫引河河段整體都為黃棕色異常水體,結(jié)合實際采樣調(diào)查分析,南橫引河作為崇明島重要的航運河道,船只航行直接造成水體濁度增高,且該河段臨近崇明島外圍港口,長期停靠在河道兩側(cè)的船只產(chǎn)生的生活污水也會對水體顏色造成影響。同一時間段的七效港河(圖6(b))大部分為一般水體,城鎮(zhèn)居民生活區(qū)一側(cè)的河道有明顯的黃棕色異常。2020年5月份崇明島的河湖水體顏色相對2019年11月份有明顯變化,七效港河的黃棕色異常水體面積有明顯的減小(圖6(d))。南橫引河整體的黃棕色異常現(xiàn)象消失轉(zhuǎn)為一般水體,但臨近夏季豐水期,開始出現(xiàn)綠色異常水體(圖6(c))。通過分析2019年11月和2020年5月崇明島重點河段Hueangle分類結(jié)果,發(fā)現(xiàn)崇明島河湖在枯水期有較多的黃棕色異常水色現(xiàn)象。
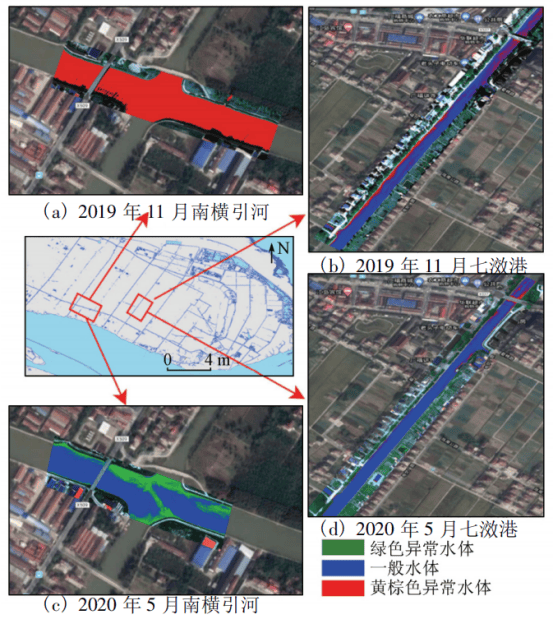
圖6上海市崇明島河湖水體Hueangle分類
產(chǎn)生該現(xiàn)象的原因可能與崇明“閘控型”水系有關(guān),在非引排期且雨水量不太充沛的時候,河流之間近乎封閉,導(dǎo)致水動力嚴重不足,再加上企業(yè)、居民生活廢水的排放,使得河湖水體顏色出現(xiàn)明顯異常。另外南橫引河作為主要航運河道,在11月和5月的水體顏色變化明顯,懷疑該河道受人為因素影響較為嚴重,需加強監(jiān)管和治理。
5.4多參數(shù)水環(huán)境分析
圖7(a)-(i)顯示了崇明島北港東岸轉(zhuǎn)河,水體顏色參量和水質(zhì)參數(shù)基于無人機高光譜數(shù)據(jù)定量反演的結(jié)果,圖7(j)顯示北港東岸轉(zhuǎn)河左右兩側(cè)為黃棕色異常水體。各類水質(zhì)參數(shù)濃度都較高,其中(d)-(e)顯示TN,TP濃度達到Ⅳ類水體的標準(1≤TN≤1.5mg/L,0.2≤TP≤0.3mg/L)。TLI指數(shù)(圖7(i))表明該區(qū)域的黃棕色異常水體為輕度富營養(yǎng)化水體。河道中間的綠色異常水體TLI指數(shù)也顯示為輕度富營養(yǎng)化,部分水質(zhì)參數(shù)(Chl-a,TSM,CDOM,TP)顯示高濃度特點(圖7(a)-(c),7(e)),但該區(qū)域的濁度、TN(圖7(h),7(e))相對黃棕色異常水體較低,分析原因在于該異常區(qū)域水流相對緩慢,泥沙等非色素顆粒物沉淀,水體透光性較好,濁度較低,浮游植物光合作用增強,再加上附近多處溝渠和隱蔽排污口不定期排放高營養(yǎng)鹽(TP主導(dǎo))污染物導(dǎo)致出現(xiàn)藻華現(xiàn)象。而河道兩側(cè)的異常水域現(xiàn)場調(diào)查時正在排放污水,排污過程導(dǎo)致水體濁度升高,水中非色素顆粒物增多,水體呈黃棕色。
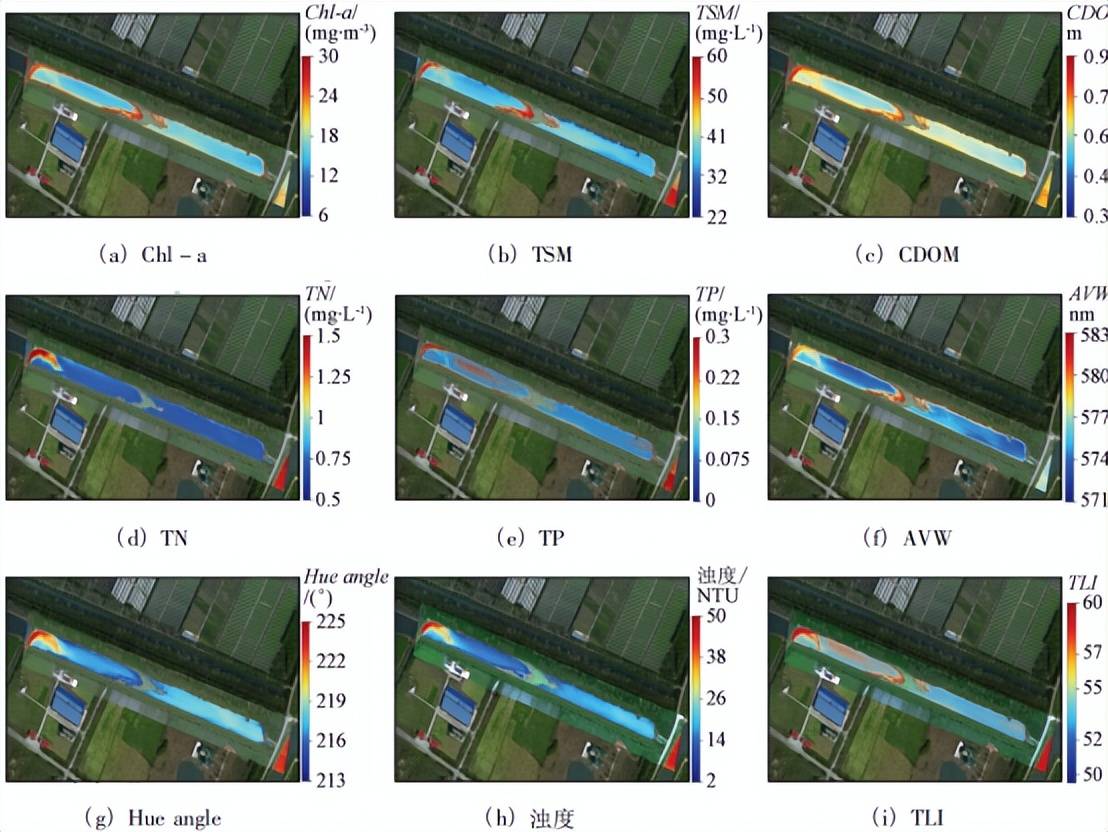
圖7上海市崇明島重點觀察河道疑似污染水體識別
結(jié)果顯示Hueangle和AVW均能夠有效地對異常顏色水體進行甄別,此外,Hueangle分類可以有效地劃分不同的水體顏色類型,用于判別異常水體的空間位置和水色異常類型,從而豐富了水環(huán)境遙感探測信息。結(jié)合水質(zhì)參數(shù)定量反演,也有助于對疑似污染水體進一步分析,對于突發(fā)性河湖水體污染的快速監(jiān)測提供了一定輔助支持,同時為現(xiàn)場觀測提供了有效信息。
六、結(jié)果討論
本研究發(fā)展了一種無人機高光譜遙感反射率標定方法,通過該方法計算的高光譜遙感反射率各波段平均ε為13.34%,RMSE平均為0.0046sr-1,R平均為0.83。可以在光照穩(wěn)定的情況下計算較為準確的水體遙感反射率。后續(xù)仍需研究如何去除光照變化計算遙感反射率。通過FFT和MNF方法對高光譜數(shù)據(jù)的條帶噪聲和光譜維噪聲進行了去除,高光譜整體信噪比提升了128%,有效提高了數(shù)據(jù)質(zhì)量。利用高光譜數(shù)據(jù)反演水體Hueangle,AVW和水質(zhì)參數(shù),有效利用了高光譜數(shù)據(jù)豐富的光譜信息。根據(jù)Hueangle能夠區(qū)分不同顏色水體的特點,通過設(shè)定Hueangle閾值的方法對水體進行分類,應(yīng)用該分類方法對上海市崇明島河湖水體顏色的時空變化進行分析。同時利用水體顏色參量以及水質(zhì)參數(shù)反演結(jié)果對上海市崇明島的重點觀察河段進行疑似污染水體的識別。以上結(jié)果表明高光譜數(shù)據(jù)在水體顏色和水質(zhì)參數(shù)反演應(yīng)用方面的潛力,結(jié)合無人機高時效性、高空間覆蓋度的特點,對于輔助河湖水環(huán)境監(jiān)測提供了強有力的支持。
推薦:
無人機高光譜成像系統(tǒng)iSpecHyper-VM100
iSpecHyper-VM系列無人機高光譜成像系統(tǒng)配合定制開發(fā)的高性能穩(wěn)定云臺,能夠有效降低飛行過程中無人機抖動引起的圖像扭曲與模糊。該系統(tǒng)與大疆M350RTK無人機完美適配,廣泛應(yīng)用于農(nóng)業(yè)、林業(yè)、水環(huán)境等行業(yè)領(lǐng)域,系統(tǒng)支持配件升級及定制化開發(fā),為教育科研、智慧農(nóng)業(yè)、目標識別、軍事反偽裝等行業(yè)高端應(yīng)用領(lǐng)域提供了高性價比解決方案。
審核編輯 黃宇
-
遙感
+關(guān)注
關(guān)注
0文章
244瀏覽量
16795 -
無人機
+關(guān)注
關(guān)注
228文章
10356瀏覽量
179693 -
高光譜
+關(guān)注
關(guān)注
0文章
328瀏覽量
9917
發(fā)布評論請先 登錄
相關(guān)推薦
手持無人機探測器:精準探測,守護安全的新利器
基于無人機多光譜遙感的棉花生長參數(shù)和產(chǎn)量估算
無人機機載高光譜成像系統(tǒng)的應(yīng)用及優(yōu)勢
基于無人機高光譜謠感的蘊地退化指示物種的識別
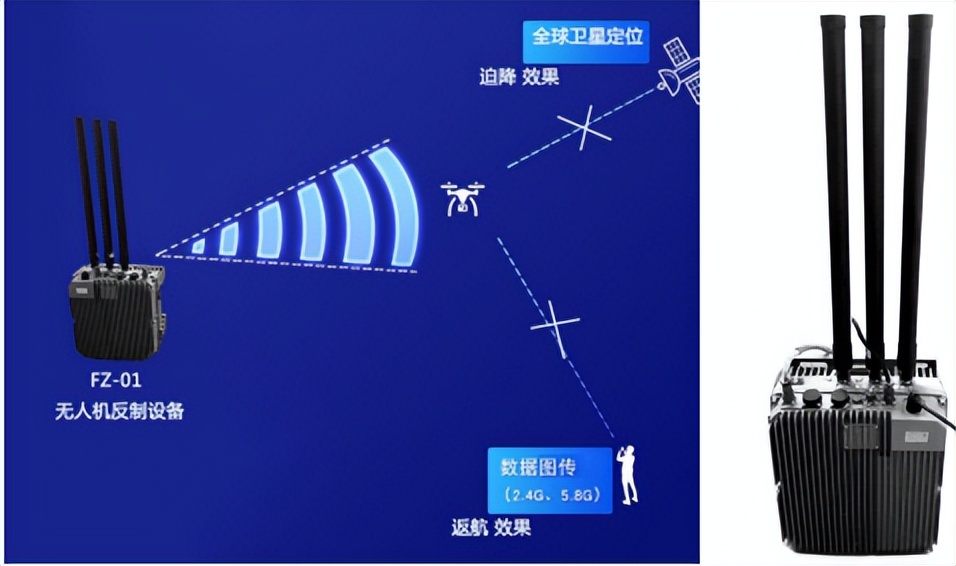
特信無人機反制設(shè)備 手持無人機探測器:精準定位,快速反制
基于無人機遙感的作物長勢監(jiān)測研究進展

基于無人機高光譜遙感的荒漠化草原地物分類研究2.0
基于無人機高光譜遙感的典型草原打草對植被表型差異分析
基于無人機高光譜遙感的荒漠化草原地物分類研究1.0
比較基于無人機高光譜影像和傳統(tǒng)方法的土壤類型分類精度

無人機高光譜影像在地質(zhì)勘探中的應(yīng)用

無人機高光譜影像是否真的可以提升農(nóng)業(yè)生產(chǎn)效率?

[萊森光學]使用無人機高光譜成像系統(tǒng)進行地表監(jiān)測
![[萊森光學]使用<b class='flag-5'>無人機</b><b class='flag-5'>高</b><b class='flag-5'>光譜</b>成像系統(tǒng)進行地表監(jiān)測](https://file1.elecfans.com//web2/M00/BD/DC/wKgaomWnauWAWwIWAAIKWf6e6I8527.png)
無人機多光譜相機有什么用
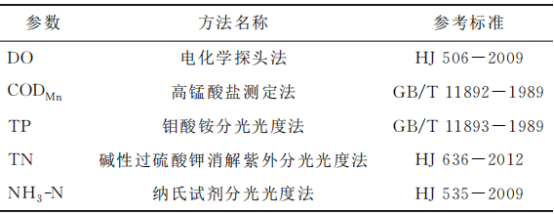
基于無人機高光譜遙感的城市水域水質(zhì)監(jiān)測與應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論