 巧用單片機系統開發兩輪平衡車案例分享
巧用單片機系統開發兩輪平衡車案例分享
在國外,兩輪載人平衡車早已被用于一些公共場合了,如今很多機場、火車站、汽車站等公共場所都運用了兩輪載人平衡車。研究兩輪平衡車小車有利于研究兩輪載人平衡車。
本作品主要由一塊IAP15F2K61S2單片機開發板做主控板,一個電源和傳感器模塊來采集角度數據并為系統供電,一個測速模塊來測得電機的速度信息,最后把角度信息轉化成PWM輸出給一個電機驅動模塊來控制兩個空心杯電機。
本設計是基于IAP15F2K61S2單片機系統開發的兩輪平衡車,采用IAP15F2K61S2單片機開發板做主控板,用MPU6050 陀螺儀和加速度傳感器采集加速度和角速度,通過計算得出角度以確定小車姿態,再通過光電門傳感器測出小車電機轉速,以計算出車速,運用PID算法再根據傳感器測得數據處理后對電機驅動進行PWM輸出,調節合適的PID參數使小車能穩定直立起來。
本作品使用簡單,打開總開關小車即可直立。兩輪載人平衡車在一些公共場合有一定的優勢,研究兩輪平衡小車對開發兩輪載人平衡車有一定的幫助,本作品具有結構簡單清晰,使用方便等特點。
設計特色:
小車底盤是我們用游標卡尺量出電機支架的孔徑和位置,用Altium Designer 軟件畫出底盤模型,再用雕刻機和亞克力板雕刻出底盤。車上面傳感器模塊和電池盒的安裝具有對稱性,使小車重心在電機上方,傳感器安裝比電機稍微高點,大概在重心處,這樣有助于小車的平衡和穩定性。在算法上我們采用精簡PID算法和卡爾曼濾波算法來控制電機,使系統更穩定可靠。
平臺選型說明:
本系統采用IAP15F2K61S2單片機開發板做主控板,IAP15F2K60S2是1T的8051單片機。是真正意義上的單片微機,寬工作電壓,不 需要外部復位電路和外部晶振,內部晶振5—33.1776M可選。片上外設豐富,具有3通道捕獲比較單元(CCP/PCA/PWM),8通道10位高速 AD,3個定時器/計數器,雙串口,高速串行通信ISP接口,大容量片內EEPROM。電機驅動采用LM298N,測速采用透射式光電門,信號經反向器輸 出穩定脈沖,電機采用空心杯,頻率可達十幾千赫茲。
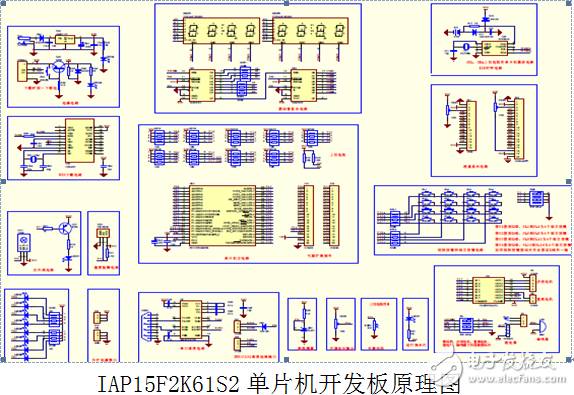
本作品用到IAP15F2K61S2單片機的內部資源有定時器1、定時器2、串口1、ADC、外部中斷0、外部中斷1、PWM等這些資源。定時器1以10ms的周期處理數據,定時器2作為串口1的波特率發生器,串口1用于調試時與上位機軟件通訊,ADC是采集電位器可調端的電壓用于調試 PID參數,外部中斷0、1用于計數測速模塊的脈沖,PWM作為使能電機驅動輸入信號。
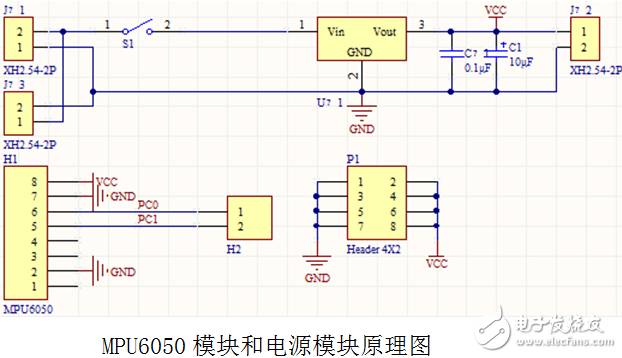
MPU6050采用IIC通訊傳輸數據,電源模塊采用LM7805($0.2053)做穩壓芯片給單片機和傳感器供電。
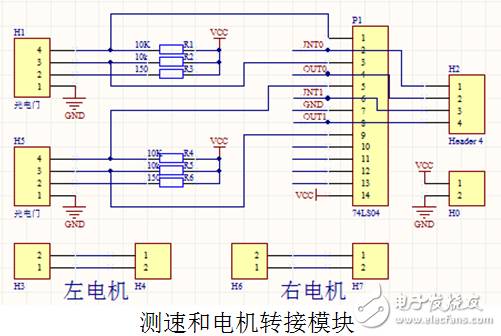
每個電機尾部都有兩個光電門用以測速,光電門輸出信號經反向器輸出后更穩定可靠。電機接線用轉接板轉接有利于保護電機接線。
keep out層畫邊框、頂層畫輔助線,用雕刻機先打孔再割邊。
設計說明:
本設計在IAP15F2K61S2單片機開發板的基礎上,利用陀螺儀和加速度傳感器以周期為10ms測出角度信息,經卡爾曼濾波算法濾波處理后再經PD算法處理輸出,測速模塊以周期為100ms測出速度信息,在經互補濾波算法濾波后再經PI算法處理輸出,將角度環的輸出量與速度環的輸出量融合作為PWM的設定值對電機驅動輸入從而控制電機。
-
8051單片機
+關注
關注
5文章
153瀏覽量
25482 -
iap15f2k61s2單片機
+關注
關注
1文章
2瀏覽量
3927
原文標題:教你用單片機系統開發兩輪平衡車
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論