 現場總線如何保證工業通信的數據穩定快速傳輸
現場總線如何保證工業通信的數據穩定快速傳輸
工業控制的應用離不開經典控制理論,隨著計算機技術在工業控制中的廣泛應用,反饋控制的要求體現在控制指令如何到達執行器,而控制效果如何通過傳感器發回控制系統。在復雜的工業環境中,現場總線能夠正確、快速、穩定的通信,從而保證工業控制系統既能得到及時、準確的現場數據,經過高效處理后,又能快速、精確的發出執行命令。
1、通信的基本模型
通信就是將信息從一個點傳送到另一個點,比如說電話、廣播和電視。工業通信系統也是如此,也需要發送器、接收器以及和通信鏈路。鏈路類型包括雙絞線、同軸電纜、光纖、無線和微波。發送端解調器調制數據,接收端調制解調器解調信號以再現原始數據,而其中的通信規則稱為協議。

通信系統的基本模型

2、工業通信的特殊要求
工業通信與一般通信相比有一些特殊的要求,比如說工業環境就不同于辦公室環境。

工業通信主要是過程數據、狀態變量、維護等,數據分類如下表所示:
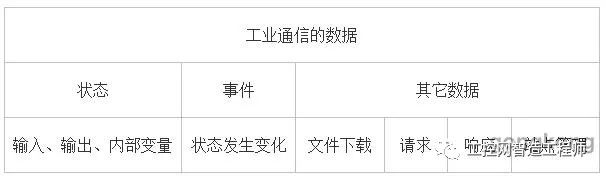
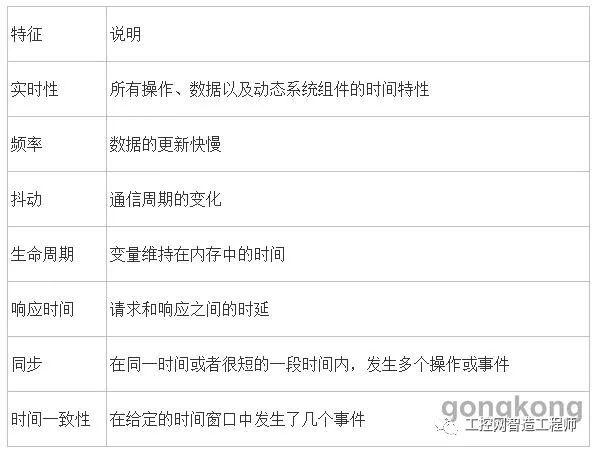
通信中和時間相關的特征有實時性、頻率、抖動、生命周期、響應時間、同步、時間和空間的相關性或一致性。工業通信往往要求保證通信的實時性,也就是說響應時間是否滿足時間限制。
3、現場總線如何滿足工業通信的要求
OSI模型定義了一個框架物理層通常與如電纜、連接器、網絡接口卡、無線傳輸硬件等物理介質相混淆。物理層不僅定義了物理介質及其正確連接的接口要求,物理層定義編碼方式、校驗方法、帶寬、頻譜、載波、波特率、電、光、無線電信號、流入異步串行通信控制、電纜類型、連接器的機械設計。信號通過傳輸介質從發送端到接收端。通信介質的機械和電氣特性。
而數據鏈路層負責創建、傳輸和接收數據包,現場總線對于數據鏈路層有細分為LLC和MAC兩層,前者提供接口網絡層協議,并控制與其對等體的邏輯通信,后者提供對特定物理編碼的訪問和傳輸。
應用層規定了交互數據的方式,并定義了設備的各種信息、狀態和參數。
現場總線的通信數據一般分為標識數據和通用消息。標識數據是指控制器與傳感器、控制器與執行器以及控制器之間傳輸過程變量。通用消息在系統組態和維護階段,用于文件的下載和上傳。

3.1、替代4-20mA的接線方案
過去工業通信采用模擬信號,就是廣為人知的4-20mA技術,后來現場總線使用數字通信體現出抗噪聲、減少電纜、診斷功能等諸多的優點。因此現場總線會取代4-20mA。
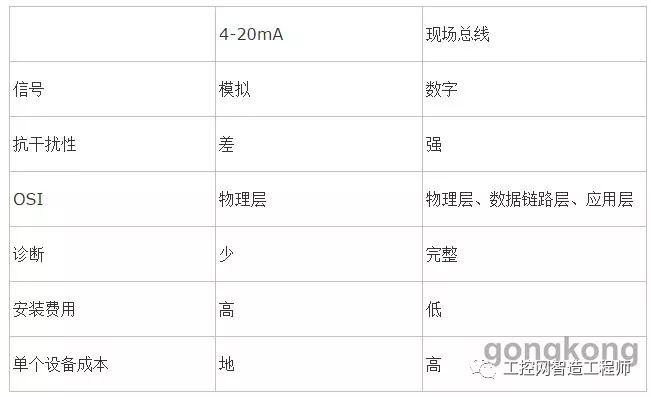
采用現場總線的關鍵要求之一是分布式智能。為了訪問現場總線,智能的傳感器和執行器需要具備計算能力、數字通信、協議標準,因此設備成本相對就高。
有人會把RS-232和RS-485當成總線,其實兩者是一種接口的標準。接口標準主要從電氣特性(信號)、機械特性(DB9)、管腳功能進行描述。兩者的主要區別就是邏輯如何表示,前者是電壓表示01,后者是電壓差表示01。具體的比較如表所示。
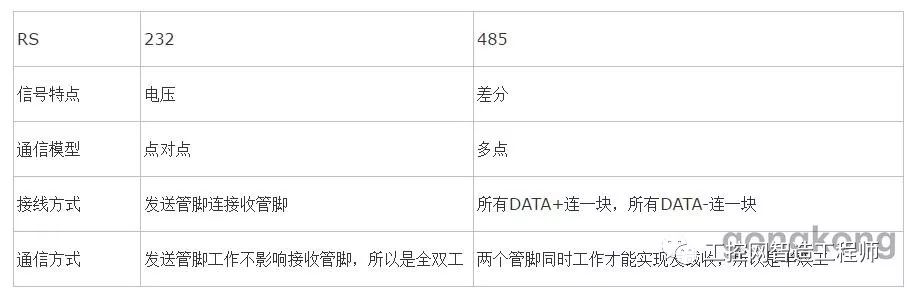
因為RS-232只能實現點對點通信(雙機互聯),無法聯網(多機),而RS-485能夠連成總線型網絡,而且很多現場總線基于RS-485標準,所以有人會理解成485總線,但是嚴格來說485總線不是一種現場總線,只是有些現場總線是使用了RS-485作為其物理層定義,因此現場總線和485不是一個層次上的概念。
3.3、曼徹斯特編碼、編碼、碼元的概念
電纜和連接器的引腳分配。引腳分配取決于電纜的類型以及所使用的網絡架構。電信號的格式。用于信號0和1的編碼,值或模擬中的特定值傳輸取決于所使用的網絡架構。大多數現場總線使用曼徹斯特編碼通信。
將時鐘同步信號就隱藏在數據波形中,每個碼元包含一個跳變,低到高或者高到低表示一個碼元。先理解碼元、比特、波特率、比特率,碼元就相當于單詞,而比特就是字母,單位時間內的傳輸的碼元就是波特率,而單位時間傳輸的比特就是比特率。單詞可以由一個字母組成,也可以由幾個字母組成,也就是說碼元數是比特數的倍數,這時波特率也就是比特率的倍數關系。我們都有背單詞的經歷,比如說我們每天都要記住10個單詞,假設每個單詞都是4個字母組成,那么波特率就是每天記住的單詞數,而比特率就是每天記住所有單詞的字母數目。
3.4、通信介質
現場總線一般使用有線連接,原理是使用電磁波在通信介質傳輸中傳播,通信介質有雙絞線、同軸電纜和光纖,如圖所示。隨著工業現場對接線要求的不斷變化,以及無線技術的快速發展,如今現場總線開始越來越多的使用無線連接。

3.5、通信模型
通信模式是指兩個或多個應用程序之間交互對象的方式,分為客戶端/服務器和生產者/消費者(出版者/訂閱者)兩類模式。
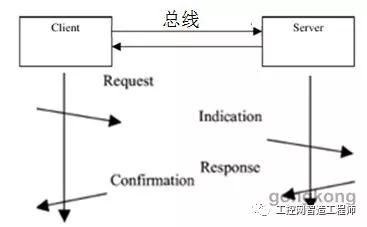
3.5.1、客戶端/服務器模式
圖顯示了客戶端/服務器模式,該模式更適合傳輸狀態數據。當客戶端發出讀請求后,服務器就回復。客戶端/服務器模式的通信過程一般細分為請求、指示、響應和確認四個步驟,其中指示是指服務器收到了一個請求事件,確認說明客戶端收到了響應。響應服務有不同的意思,有的響應表示收到消息,有的表示開始服務或返回結果。對于一個讀服務,讀出對象的值包含在響應中,讀請求包含對象名稱,并根據尋址機制訪問本地對象,響應要么返回結果,要么返回執行失敗的原因,以及響應時間。對象可以是先驗、簡單變量或一個復雜的結構體。
符合這種模式中的協議大多從制造信息規范(MMS)發展而來,應用層基于MMS模型管理各種對象,如任務(創建、取消、啟動、恢復和停止)、變量(讀寫)、域(下載和上傳)。MMS通常只會有一個服務子集。整個操作細分成請求、執行、響應三個部分,與MAC層處理時間和服務執行時間有關。
WorldFIP、ROFIBUS-FMS、PROFIUBUS-DP、INTERBUS、AS-I、P-NET等現場總線都是使用客戶端/服務器的通信模型。而BatiBus是一種特殊的客戶端/服務器模型,因為其中沒有回復和確認。
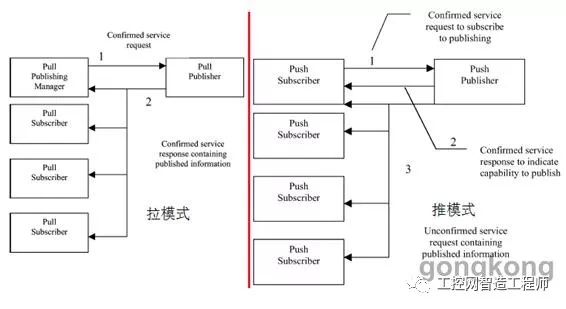
3.5.2、發布者/訂閱者模式
包含一個發布者應用和若干用戶應用,分為“推”和“拉”兩種模式。對于拉模式來說,發布者管理器發送一個請求,發布者通過廣播(或多播)響應;而對于推模式來說,一個訂閱者發送請求,發布者先響應這個請求,然后發送廣播(或多播)數據。如圖所示,推模式多了一次步驟。
發布者/訂閱者模型非常適合于傳輸事件數據,可用于“事件通知”的要求和提示、MMS信息定義的提示。發布者/訂閱者模型用于緩沖區之間通信(讀寫服務)。WorldFIP、CAN、LonWorks、EIBus、ControlNet、SWIFTNET和FF使用了發布者/訂閱者模型。
3.6、通信機制
通信機制包括周期性通信、、應答機制和觸發機制。周期性通信源于自動控制和事件檢測的基礎——采樣理論。大多數標記數據作為控制算法的輸入或輸出,要求周期性傳輸,主要應用在集中式控制系統進行周期性的查詢操作。不同數據的通信周期可能不同,會產生抖動,那么通信協議就是要盡量消除抖動。這些系統基于狀態通信,有時也稱為“時間觸發系統”。
![]()
圖顯示了一個周期性通信的例子,每個基本周期都有C和D,每兩個周期有B和E,每三個周期有F,因此總線周期(大周期)等于所有周期的最小公倍數(LCM),而節拍(小周期)是一個時間間隔等于最大公約數(HCD)。有的現場總線所有數據都通過周期型通信,但網絡負載太大了,因此某些數據會采用非周期的傳輸,比如說一些狀態變量可以在發生變化后再傳送。
協議引入應答機制,接收機通知發射機一個消息是否已正確接收。在現場總線應用中,非周期通信需要應答機制,而周期性通信則不需要,因為在周期性通信中如果出現錯誤,接收方會忽略錯誤并等待后續正確數據。
除了周期性和非周期性通信之外還有時間、事件觸發。大多數現場總線都傾向于一種時間觸發系統,一些還會結合事件觸發,由周期性服務器管理事件。
3.7、錯誤控制與流量控制
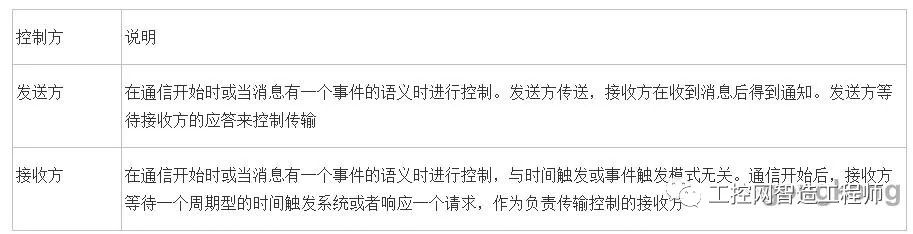
錯誤管理、恢復機制要在用戶控制中,即應用程序進程中。錯誤檢測或通信控制要么由發送方實現,要么由接收方實現。在現場總線中,兩種情況都有,現場總線通常會提供兩種通信機制。
-
現場總線
+關注
關注
3文章
519瀏覽量
38538 -
工業通信
+關注
關注
0文章
114瀏覽量
15541
原文標題:如何從工業通信的角度理解現場總線
文章出處:【微信號:gongkongBBS,微信公眾號:工控網智造工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論