") 物聯(lián)網(wǎng)系統(tǒng)中的自動(dòng)駕駛的“眼睛”_純固態(tài)激光雷達(dá)
物聯(lián)網(wǎng)系統(tǒng)中的自動(dòng)駕駛的“眼睛”_純固態(tài)激光雷達(dá)
物聯(lián)網(wǎng)系統(tǒng)中為什么要使用純固態(tài)激光雷達(dá)

物聯(lián)網(wǎng)系統(tǒng)中使用純固態(tài)激光雷達(dá)的原因主要基于其獨(dú)特的優(yōu)勢(shì)和應(yīng)用價(jià)值,這些優(yōu)勢(shì)使得純固態(tài)激光雷達(dá)在物聯(lián)網(wǎng)的多個(gè)領(lǐng)域中都發(fā)揮著重要作用。以下是詳細(xì)的分析:
純固態(tài)激光雷達(dá)的優(yōu)勢(shì)
1、高精度和高分辨率:
純固態(tài)激光雷達(dá)能夠?qū)崿F(xiàn)對(duì)目標(biāo)的精確測(cè)量和識(shí)別,其高精度和高分辨率的特性使得它在物聯(lián)網(wǎng)系統(tǒng)中能夠提供更準(zhǔn)確的數(shù)據(jù)支持。
2、高可靠性和低故障率:
相比傳統(tǒng)的機(jī)械激光雷達(dá),純固態(tài)激光雷達(dá)沒有機(jī)械轉(zhuǎn)動(dòng)部件,因此具有更高的可靠性和更低的故障率。這對(duì)于需要長時(shí)間穩(wěn)定運(yùn)行的物聯(lián)網(wǎng)系統(tǒng)來說至關(guān)重要。
3、易于集成和低成本:
純固態(tài)激光雷達(dá)的固態(tài)器件體積小、重量輕,易于集成到各種物聯(lián)網(wǎng)設(shè)備中。同時(shí),其生產(chǎn)成本相對(duì)較低,有利于降低物聯(lián)網(wǎng)系統(tǒng)的整體成本。
4、高安全性和低風(fēng)險(xiǎn):
純固態(tài)激光雷達(dá)能夠?qū)崿F(xiàn)對(duì)目標(biāo)的精確測(cè)距和識(shí)別,有效提高了物聯(lián)網(wǎng)系統(tǒng)在復(fù)雜環(huán)境中的安全性,降低了潛在的風(fēng)險(xiǎn)。
5、探測(cè)距離遠(yuǎn)、抗干擾能力強(qiáng):
純固態(tài)激光雷達(dá)具有較遠(yuǎn)的探測(cè)距離和強(qiáng)大的抗干擾能力,能夠在復(fù)雜環(huán)境中穩(wěn)定工作,為物聯(lián)網(wǎng)系統(tǒng)提供可靠的數(shù)據(jù)支持。
純固態(tài)激光雷達(dá)在物聯(lián)網(wǎng)系統(tǒng)中的應(yīng)用
1、自動(dòng)駕駛:
在自動(dòng)駕駛汽車中,純固態(tài)激光雷達(dá)能夠?qū)崟r(shí)感知周圍環(huán)境,提供高精度的距離、速度和方向信息,為自動(dòng)駕駛決策提供可靠支持。
2、機(jī)器人導(dǎo)航與避障:
在機(jī)器人領(lǐng)域,純固態(tài)激光雷達(dá)可以幫助機(jī)器人實(shí)現(xiàn)精準(zhǔn)導(dǎo)航和避障功能,提高機(jī)器人在復(fù)雜環(huán)境中的自主移動(dòng)能力。
3、無人機(jī)定位與測(cè)繪:
無人機(jī)搭載純固態(tài)激光雷達(dá)可以實(shí)現(xiàn)精準(zhǔn)定位和測(cè)繪功能,為地理信息采集、環(huán)境監(jiān)測(cè)等領(lǐng)域提供高效、準(zhǔn)確的解決方案。
4、智能家居與安防:
在智能家居和安防領(lǐng)域,純固態(tài)激光雷達(dá)可以用于人體檢測(cè)、入侵報(bào)警等場(chǎng)景,提高家居安全和安防系統(tǒng)的智能化水平。
5、智能交通系統(tǒng):
純固態(tài)激光雷達(dá)可以用于智能交通系統(tǒng)中,實(shí)現(xiàn)車輛檢測(cè)、交通流量統(tǒng)計(jì)、交通擁堵分析等功能。通過實(shí)時(shí)監(jiān)測(cè)道路交通情況,可以為交通管理部門提供數(shù)據(jù)支持,優(yōu)化交通流組織和交通管理。
綜上所述,物聯(lián)網(wǎng)系統(tǒng)中使用純固態(tài)激光雷達(dá)的原因主要在于其高精度、高可靠性、易于集成、低成本以及廣泛的應(yīng)用價(jià)值。純固態(tài)激光雷達(dá)的這些優(yōu)勢(shì)使得它在自動(dòng)駕駛、機(jī)器人、無人機(jī)、智能家居等多個(gè)物聯(lián)網(wǎng)領(lǐng)域中都發(fā)揮著重要作用,為物聯(lián)網(wǎng)系統(tǒng)的智能化、高效化提供了有力支持。
本文會(huì)再為大家詳解激光雷達(dá)家族中的一員——純固態(tài)激光雷達(dá)
純固態(tài)激光雷達(dá)的定義
理論上來說,固態(tài)激光雷達(dá)是完全沒有移動(dòng)部件的雷達(dá),光相控陣(Optical Phased Array)及Flash是其典型技術(shù)路線,也被認(rèn)為是純固態(tài)激光雷達(dá)方案。
但近年來,一些非完全旋轉(zhuǎn)的激光雷達(dá)也被統(tǒng)稱為“固態(tài)激光雷達(dá)”,它們具備了固態(tài)激光雷達(dá)很多的性能特點(diǎn),如分辨率高、有限水平FOV(前向而不是360°)等,但這些技術(shù)方案會(huì)有一些微小的移動(dòng)部件,從嚴(yán)格意義上來說不能算純固態(tài)激光雷達(dá)。
純固態(tài)激光雷達(dá)的原理
固態(tài)激光雷達(dá)主要是依靠波的反射或接收來探測(cè)目標(biāo)的特性,大多源自三維圖像傳感器的研究,實(shí)際源自紅外焦平面成像儀,焦平面探測(cè)器的焦平面上排列著感光元件陣列,從無限遠(yuǎn)處發(fā)射的紅外線經(jīng)過光學(xué)系統(tǒng)成像在系統(tǒng)焦平面的這些感光元件上,探測(cè)器將接受到光信號(hào)轉(zhuǎn)換為電信號(hào)并進(jìn)行積分放大、采樣保持,通過輸出緩沖和多路傳輸系統(tǒng),最終送達(dá)監(jiān)視系統(tǒng)形成圖像。
純固態(tài)激光雷達(dá)的分類
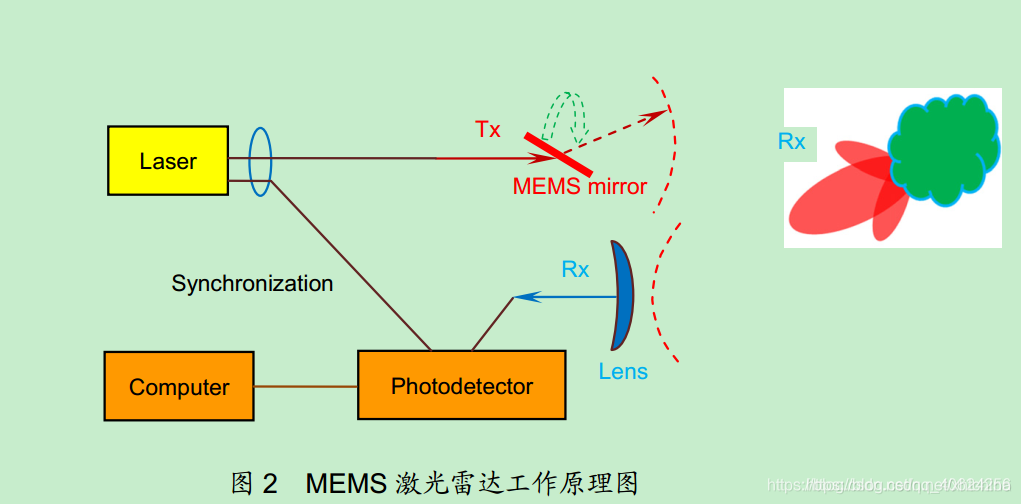
3.1.MEMS(Micro-Electro-Mechanical System)微機(jī)電系統(tǒng)
MEMS指代的是將機(jī)械機(jī)構(gòu)進(jìn)行微型化、電子化的設(shè)計(jì),將原本體積較大的機(jī)械結(jié)構(gòu)通過微電子工藝集成在硅基芯片上,進(jìn)行大規(guī)模生產(chǎn)。技術(shù)成熟,完全可以量產(chǎn)。主要是通過MEMS微鏡來實(shí)現(xiàn)垂直方面的一維掃描,整機(jī)360度水平旋轉(zhuǎn)來完成水平掃描,而其光源是采用光纖激光器,這主要是由于905納米的管子重頻做不高,重頻一高平均功率就會(huì)太大,會(huì)影響激光管的壽命。
采用微振鏡對(duì)進(jìn)行激光束的偏轉(zhuǎn),它需要有平整的鏡面,將機(jī)械式的激光雷達(dá)的旋轉(zhuǎn)部件微縮.從嚴(yán)格意義上來說,MEMS并不算是純固態(tài)激光雷達(dá),這是因?yàn)樵贛EMS方案中并沒有完全消除機(jī)械,而是將機(jī)械微型化了,掃描單元變成了MEMS微鏡。
| 電熱效應(yīng) | 對(duì)電熱雙壓電晶片驅(qū)動(dòng)的微振鏡加熱,由于金屬鋁的形變大于介質(zhì)硅,從而形成微振鏡的形變振動(dòng)。參數(shù):2.3V,9°偏轉(zhuǎn);施加12mw電功率,響應(yīng)速度74Hz。 |
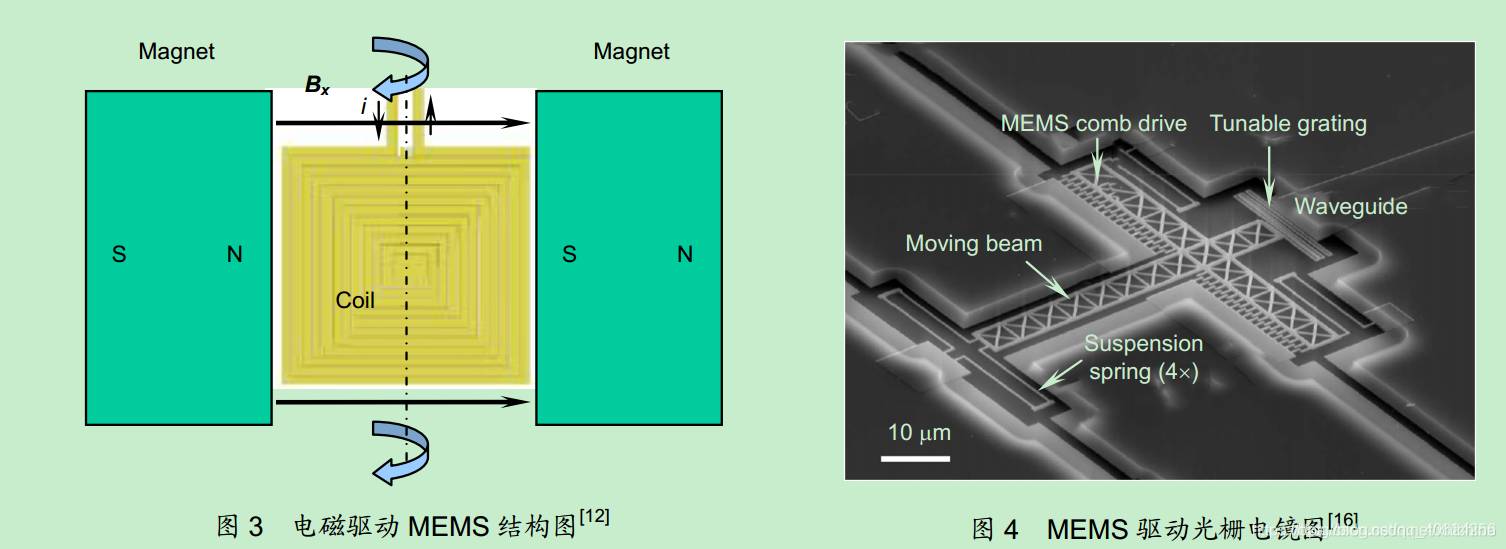
| 電磁效應(yīng) | 內(nèi)部需要封裝可動(dòng)磁性物質(zhì)或者可動(dòng)磁性線圈產(chǎn)生磁場(chǎng)。通過施加磁場(chǎng)產(chǎn)生洛倫茲力使得線圈產(chǎn)生偏轉(zhuǎn),從而驅(qū)動(dòng)MEMS振鏡偏轉(zhuǎn),響應(yīng)速率可達(dá)10kHz |
| 壓電效應(yīng) | 需要異質(zhì)材料的介入,壓電材料具有高效率、響應(yīng)速度快的優(yōu)點(diǎn)。實(shí)驗(yàn)通過電鍍?cè)诠枭铣练ePZT薄膜,加工形成的MEMS結(jié)構(gòu)并進(jìn)行光學(xué)掃描,獲得11.2kHz,39°視場(chǎng) |
| 壓電效應(yīng) | 具有尺寸小可單片全集成的優(yōu)點(diǎn),通常需要在真空環(huán)境下以獲得更高的驅(qū)動(dòng)效率,10V電壓驅(qū)動(dòng)可以得到10°的掃描角度。 |
| 壓電效應(yīng) | 瑞典KTH的研究小組,近期驗(yàn)證了一種新方法,通過MEMS的改變光柵周期實(shí)現(xiàn)角度的偏轉(zhuǎn),在20V電壓驅(qū)動(dòng)下可以得到5.6°的掃描角度,功率消耗微瓦量級(jí)。也有包括MEMS改變光程差調(diào)控相位的相控陣。 |
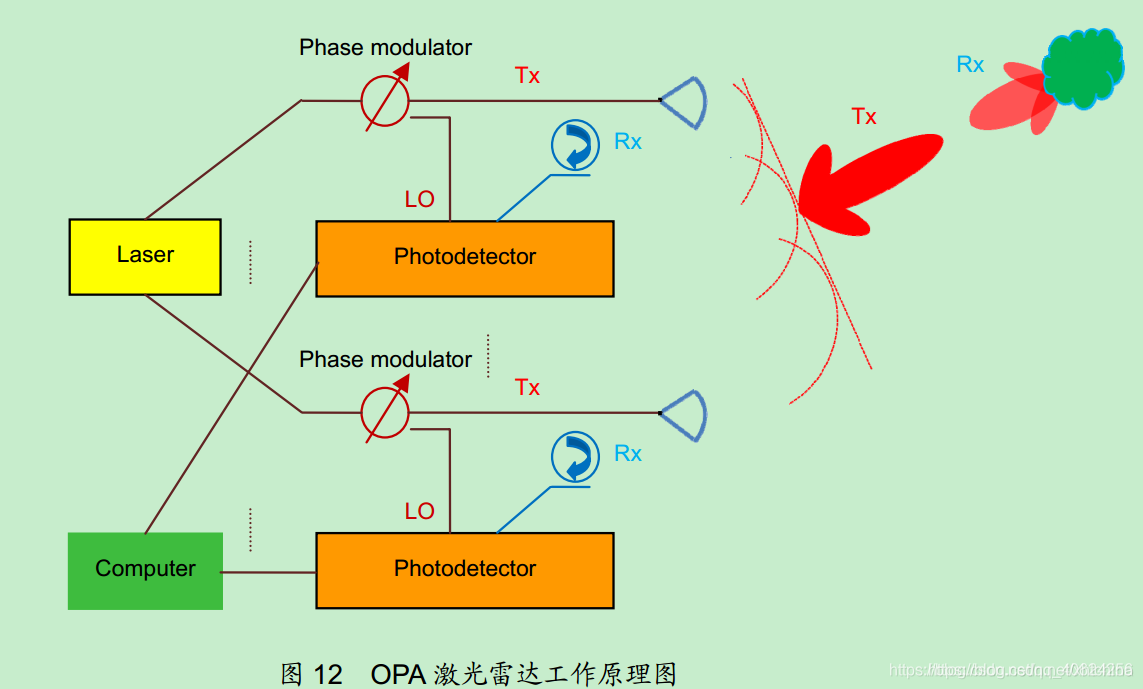
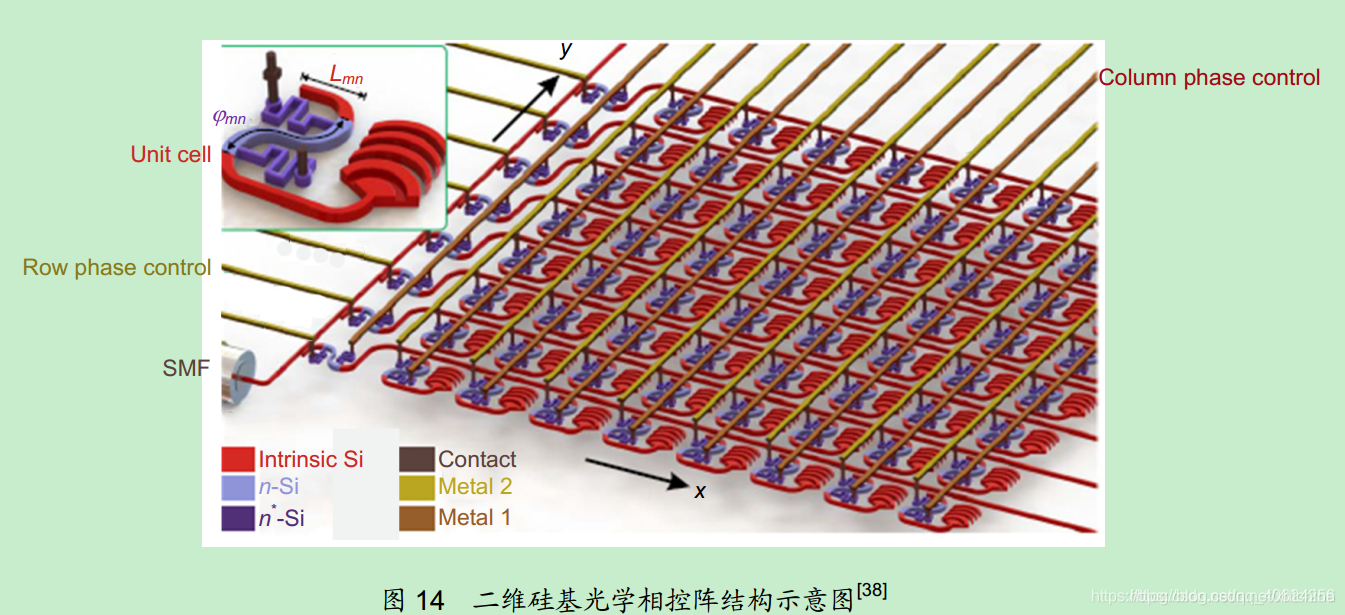
3.2.OPA(optical phased array)光學(xué)相控陣技術(shù)
相比其他技術(shù)方案,OPA方案給大家描述了一個(gè)激光雷達(dá)芯片級(jí)解決方案的美好前景,它主要是采用多個(gè)光源組成陣列,通過控制各光源發(fā)光時(shí)間差,合成具有特定方向的主光束。然后再加以控制,主光束便可以實(shí)現(xiàn)對(duì)不同方向的掃描。雷達(dá)精度可以做到毫米級(jí),且順應(yīng)了未來激光雷達(dá)固態(tài)化、小型化以及低成本化的趨勢(shì),但難點(diǎn)在于如何把單位時(shí)間內(nèi)測(cè)量的點(diǎn)云數(shù)據(jù)提高以及投入成本巨大等問題。
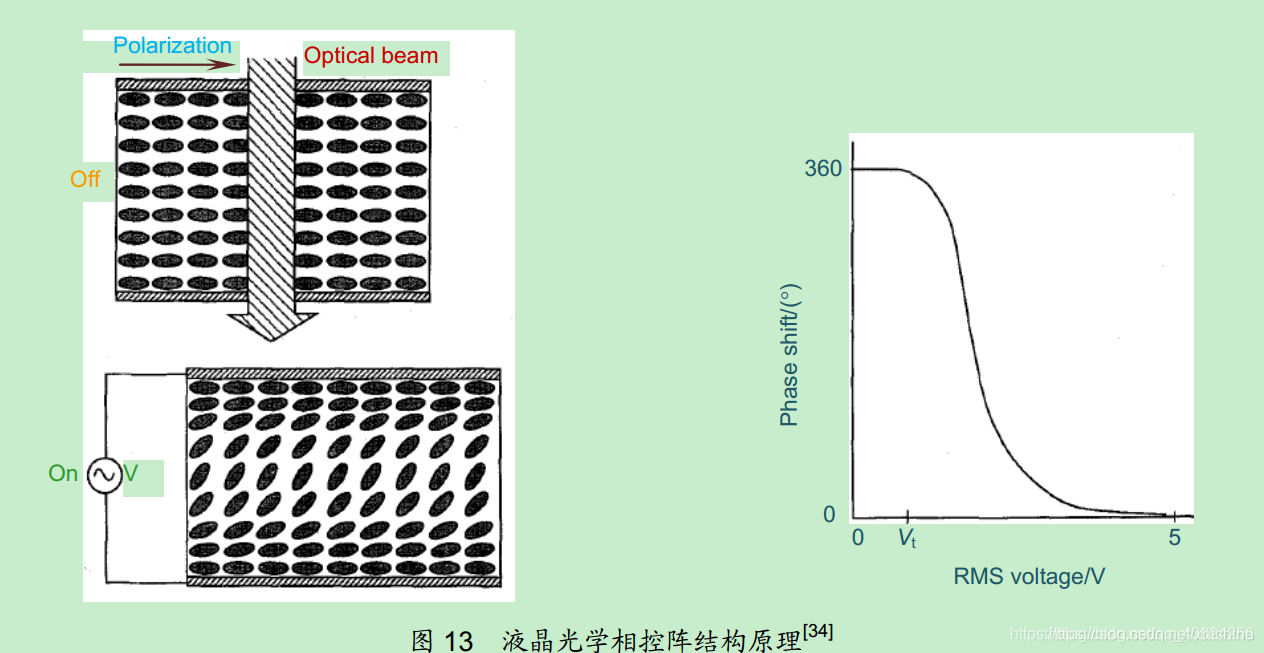
通過外加電壓改變液晶的取向,從而實(shí)現(xiàn)不同陣元的相位調(diào)節(jié);驅(qū)動(dòng)電壓小,易大面積集成,最大掃描角度+10°,掃描速度在亳秒量級(jí)。但響應(yīng)速度較慢,目前可達(dá)200us。掃描精度較大。因?yàn)楣杈哂休^高的熱光系數(shù),目前主要集中于如何有效地減小陣列串?dāng)_、提高掃描精度、增大掃描角度、提高熱穩(wěn)定性等問題,而且由于片上光功率較低,使得遠(yuǎn)距離探測(cè)存在困難.
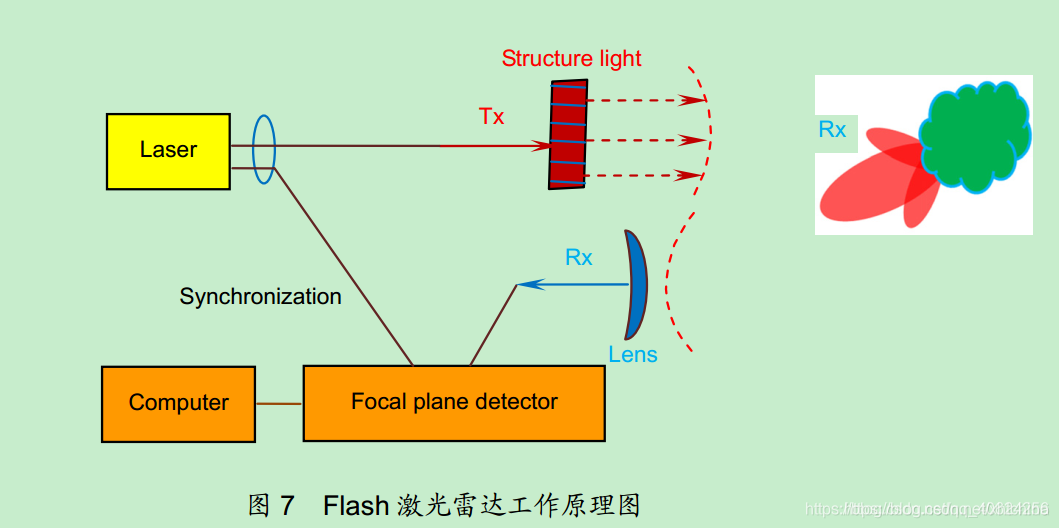
3.3.Flash
Flash激光雷達(dá)的原理也是快閃,它不像MEMS或OPA的方案會(huì)去進(jìn)行掃描,而是短時(shí)間直接發(fā)射出一大片覆蓋探測(cè)區(qū)域的激光,再以高度靈敏的接收器,來完成對(duì)環(huán)境周圍圖像的繪制。主要問題是探測(cè)距離近,在技術(shù)的可靠性方面存在問題,F(xiàn)lash激光雷達(dá)的距離分辨率力和角度分辨力主要取決于焦平面探測(cè)器陣列,焦平面探測(cè)器陣列使用PIN型光電探測(cè)器(近距離)或是雪崩光電探測(cè)器(遠(yuǎn)距離,價(jià)格昂貴)。
純固態(tài)激光雷達(dá)的優(yōu)劣勢(shì)
利用光學(xué)相控陣掃描技術(shù)的固態(tài)激光雷達(dá)的確有很多優(yōu)勢(shì),例如:
其結(jié)構(gòu)簡(jiǎn)單,尺寸小,無需旋轉(zhuǎn)部件,在結(jié)構(gòu)和尺寸上可以大大壓縮,提高使用壽命并使其成本降低。
掃描精度高,光學(xué)相控陣的掃描精度取決于控制電信號(hào)的精度,可以達(dá)到千分之一度量級(jí)以上。
可控性好,在允許的角度范圍內(nèi)可以做到任意指向,可以在重點(diǎn)區(qū)域進(jìn)行高密度的掃描。
掃描速度快,光學(xué)相控陣的掃描速度取決于所用材料的電子學(xué)特性,一般都可以達(dá)到MHz量級(jí)。
當(dāng)然固態(tài)激光雷達(dá)也同樣存在一些劣勢(shì),如:
掃描角有限,固態(tài)意味著激光雷達(dá)不能進(jìn)行360度旋轉(zhuǎn),只能探測(cè)前方。因此要實(shí)現(xiàn)全方位掃描,需在不同方向布置多個(gè)(至少前后兩個(gè))固態(tài)激光雷達(dá)
旁瓣問題,光柵衍射除了中央明紋外還會(huì)形成其他明紋,這一問題會(huì)讓激光在最大功率方向以外形成旁瓣,分散激光的能量。
加工難度高,光學(xué)相控陣要求陣列單元尺寸必須不大于半個(gè)波長,一般目前激光雷達(dá)的工作波長均在1微米左右,故陣列單元的尺寸必須不大于500nm。而且陣列密度越高,能量也越集中,這都提高了對(duì)加工精度的要求,需要一定的技術(shù)突破。
接收面大、信噪比差:傳統(tǒng)機(jī)械雷達(dá)只需要很小的接收窗口,但固態(tài)激光雷達(dá)卻需要一整個(gè)接收面,因此會(huì)引入較多的環(huán)境光噪聲,增加了掃描解析的難度。
純固態(tài)激光雷達(dá)的廠商
td {white-space:nowrap;border:1px solid #dee0e3;font-size:10pt;font-style:normal;font-weight:normal;vertical-align:middle;word-break:normal;word-wrap:normal;}
| 廠商 | 國別 | 成立時(shí)間 | 主要投資機(jī)構(gòu) | 產(chǎn)品線 |
| Velodyne | 美國 | 1983 | 百度、福特 | 16、32、64、128線機(jī)械、32線MEMS |
| Quanergy | 美國 | 2012 | 三星,motusvantures、戴姆勒、德爾福 | OPA、8線機(jī)屬 |
| 速騰聚創(chuàng) | 中國 | 2014 | 東方富海、復(fù)星銳正、北汽產(chǎn)投 | 16、32、64線機(jī)械式、MEMS、OPA |
| 北醒光子 | 中國 | 2015 | IDG、沃勒斯機(jī)器人、順為 | flash面陣 |
| 禾賽科技 | 中國 | 2013 | 遠(yuǎn)瞪資本、磐谷創(chuàng)投、百度 | 40、64線機(jī)械式、ZOLO固態(tài) |
| 北科天繪 | 中國 | 2005 | 聯(lián)想之星、star vc | 16、32、64線機(jī)械、flash面陣 |
| 光珀智能 | 中國 | 2013 | 浙江金控 | flash面陣 |
| LeddarTech | 加拿大 | 2007 | BDC、Venture capital、歐司朗、德爾福 | 8線機(jī)械式 |
| IBEO | 德國 | 2009 | 采埃孚(T1) | 4線機(jī)成式、MEMS |
| Luminar | 美國 | 2012 | 1517fund、GVA capital | MEMS |
| Innoviz | 以色列 | 2016 | Zohar Zisapel、三星、軟銀 | MEMS |
| Cepton | 美國 | 2016 | Micro-motion(類似MEMS) | |
| Innovusion | 美國 | 2016 | ** | MEMS |
| Orixy Vision | 以色列 | 2009 | Bessemer Venture Partner | COR相干光激光雷達(dá) |
| Tetra Vue | 美國 | 2008 | Nautilars、三星、Robert Venture、富士康 | flash面陣 |
| 鐳神智能 | 中國 | 2015 | 招商、如山、北極光、達(dá)晨 | 16線機(jī)械、OPA、flash面陣、MEMS |
| Ouster | 美國 | 2015 | Cox Enterprises | 64線機(jī)械 |
| Strobe | 美國 | 2014 | 通用 | 線性調(diào)頻、事實(shí)上幫通用做MEMS |
| 博世 | 德國 | 1886 | 汽車零部件行業(yè)T1的老大 | MEMS |
| 先鋒 | 日本 | 1938 | 日本知名消費(fèi)電子產(chǎn)品企業(yè) | MEMS |
供應(yīng)商A:北醒
https://www.benewake.com/
1、產(chǎn)品能力
(1)選型手冊(cè)
北醒企業(yè)宣傳冊(cè).pdf
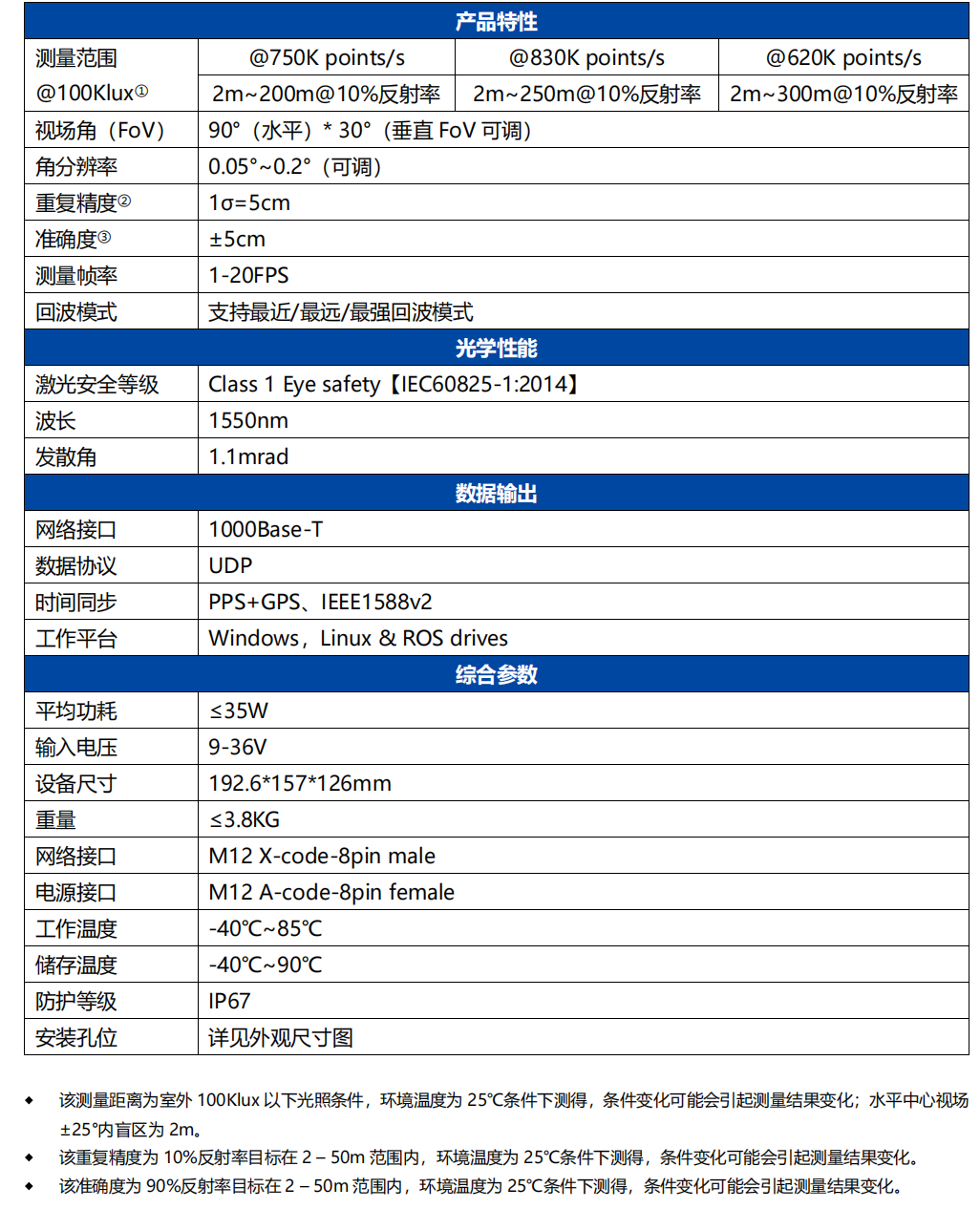
(2)主推型號(hào)1:Horn-X2長距高清3D激光雷達(dá)
對(duì)應(yīng)的產(chǎn)品詳情介紹

北醒 Horn-X2 Pro 是一款集高性能、高安全性、高可靠性為一體的三維激光雷達(dá),可適用于車路協(xié)同
(V2X)、智慧機(jī)場(chǎng)、智慧鐵路和智慧航運(yùn)等多種大交通應(yīng)用場(chǎng)景。該激光雷達(dá)擁有高垂直角分辨率,
可生成最高 600 線束高密度點(diǎn)云,輕松感知周圍環(huán)境。得益于先進(jìn)的設(shè)計(jì),Horn-X2 Pro 激光雷達(dá)可
有效地抵抗強(qiáng)環(huán)境光的干擾,在惡劣的天氣條件下也可穩(wěn)定工作。Horn-X2 Pro 支持多種工作模式,可
根據(jù)客戶需求定制產(chǎn)品的性能參數(shù),以此精準(zhǔn)匹配客戶的各種復(fù)雜需求。
參數(shù)
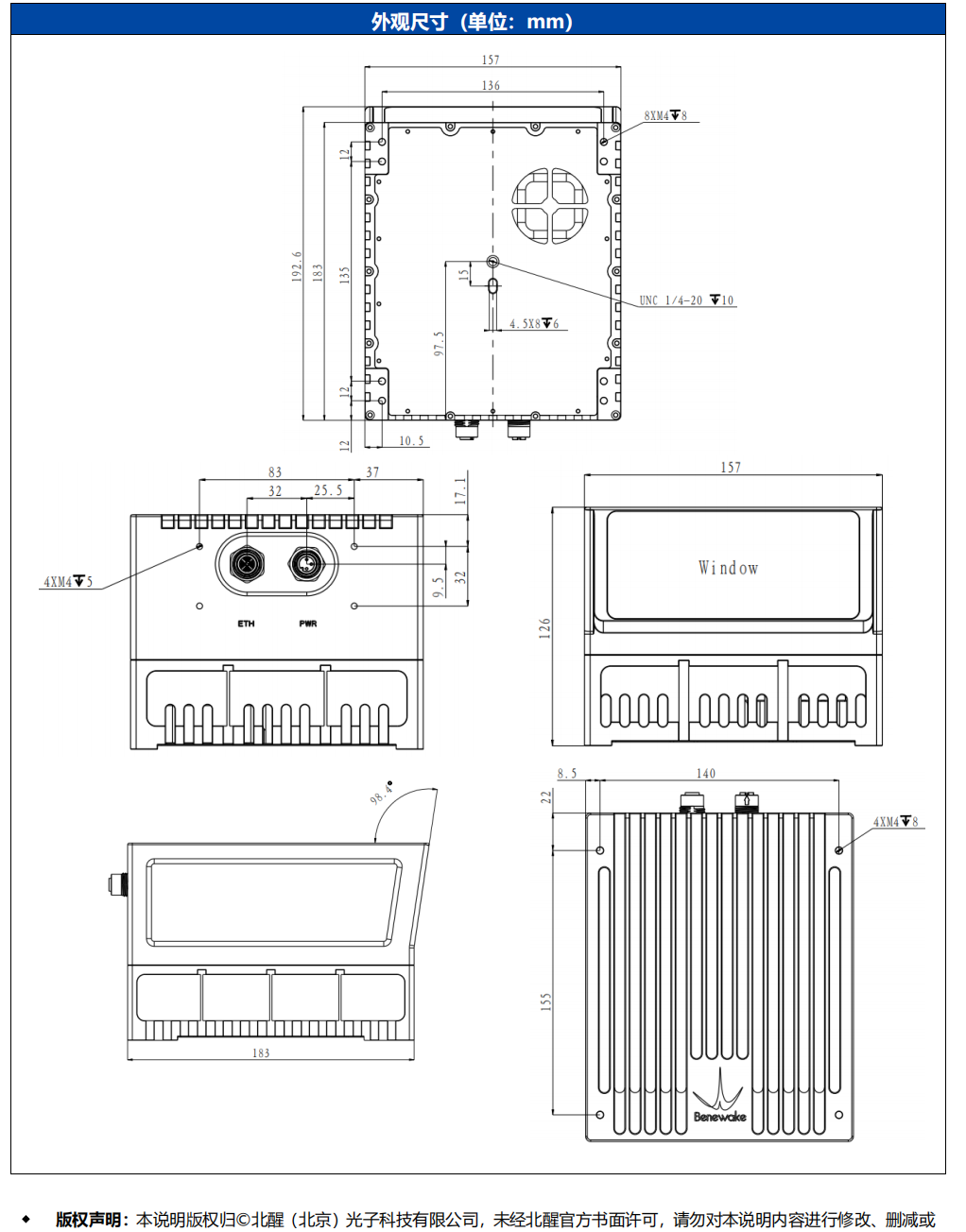
尺寸外觀
2、支撐
(1)技術(shù)產(chǎn)品
Horn-X2 Pro規(guī)格書.pdf
本文章源自奇跡物聯(lián)開源的物聯(lián)網(wǎng)應(yīng)用知識(shí)庫Cellular IoT Wiki,更多技術(shù)干貨歡迎關(guān)注收藏Wiki:Cellular IoT Wiki 知識(shí)庫(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
歡迎同學(xué)們走進(jìn)AmazIOT知識(shí)庫的世界!
這里是為物聯(lián)網(wǎng)人構(gòu)建的技術(shù)應(yīng)用百科,以便幫助你更快更簡(jiǎn)單的開發(fā)物聯(lián)網(wǎng)產(chǎn)品。
Cellular IoT Wiki初心:
在我們長期投身于蜂窩物聯(lián)網(wǎng) ODM/OEM 解決方案的實(shí)踐過程中,一直被物聯(lián)網(wǎng)技術(shù)碎片化與產(chǎn)業(yè)資源碎片化的問題所困擾。從產(chǎn)品定義、芯片選型,到軟硬件研發(fā)和測(cè)試,物聯(lián)網(wǎng)技術(shù)的碎片化以及產(chǎn)業(yè)資源的碎片化,始終對(duì)團(tuán)隊(duì)的產(chǎn)品開發(fā)交付質(zhì)量和效率形成制約。為了減少因物聯(lián)網(wǎng)碎片化而帶來的重復(fù)開發(fā)工作,我們著手對(duì)物聯(lián)網(wǎng)開發(fā)中高頻應(yīng)用的技術(shù)知識(shí)進(jìn)行沉淀管理,并基于 Bloom OS 搭建了不同平臺(tái)的 RTOS 應(yīng)用生態(tài)。后來我們發(fā)現(xiàn),很多物聯(lián)網(wǎng)產(chǎn)品開發(fā)團(tuán)隊(duì)都面臨著相似的困擾,于是,我們決定向全體物聯(lián)網(wǎng)行業(yè)開發(fā)者開放奇跡物聯(lián)內(nèi)部沉淀的應(yīng)用技術(shù)知識(shí)庫 Wiki,期望能為更多物聯(lián)網(wǎng)產(chǎn)品開發(fā)者減輕一些重復(fù)造輪子的負(fù)擔(dān)。
Cellular IoT Wiki沉淀的技術(shù)內(nèi)容方向如下:
奇跡物聯(lián)的業(yè)務(wù)服務(wù)范圍:基于自研的NB-IoT、Cat1、Cat4等物聯(lián)網(wǎng)模組,為客戶物聯(lián)網(wǎng)ODM/OEM解決方案服務(wù)。我們的研發(fā)技術(shù)中心在石家莊,PCBA生產(chǎn)基地分布在深圳、石家莊、北京三個(gè)工廠,滿足不同區(qū)域&不同量產(chǎn)規(guī)模&不同產(chǎn)品開發(fā)階段的生產(chǎn)制造任務(wù)。跟傳統(tǒng)PCBA工廠最大的區(qū)別是我們只服務(wù)物聯(lián)網(wǎng)行業(yè)客戶。
連接我們,和10000+物聯(lián)網(wǎng)開發(fā)者一起 降低技術(shù)和成本門檻
讓蜂窩物聯(lián)網(wǎng)應(yīng)用更簡(jiǎn)單~~
哈哈你終于滑到最重要的模塊了,
千萬不!要!劃!走!忍住沖動(dòng)!~
歡迎加入飛書“開源技術(shù)交流群”,隨時(shí)找到我們哦~
點(diǎn)擊鏈接如何加入奇跡物聯(lián)技術(shù)話題群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以獲取加入技術(shù)話題群攻略
Hey 物聯(lián)網(wǎng)從業(yè)者,
你是否有了解過奇跡物聯(lián)的官方公眾號(hào)“eSIM物聯(lián)工場(chǎng)”呢?
這里是奇跡物聯(lián)的物聯(lián)網(wǎng)應(yīng)用技術(shù)開源wiki主陣地,歡迎關(guān)注公眾號(hào),不迷路~
及時(shí)獲得最新物聯(lián)網(wǎng)應(yīng)用技術(shù)沉淀發(fā)布
(如有侵權(quán),聯(lián)系刪除)
審核編輯 黃宇
-
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2903文章
44262瀏覽量
371206 -
激光雷達(dá)
+關(guān)注
關(guān)注
967文章
3938瀏覽量
189593 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
783文章
13682瀏覽量
166134
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論