 勃肯特機器人新品首發!混合運動型機器人性能突破引爆關注
勃肯特機器人新品首發!混合運動型機器人性能突破引爆關注
勃肯特機器人迭代加速,進化不止!在第24屆中國國際工業博覽會上,勃肯特機器人再次釋放科技實力,重磅發布了混合運動型機器人HS系列新品,以顛覆之作全面進擊工業機器人市場。
性能出色,易于維護
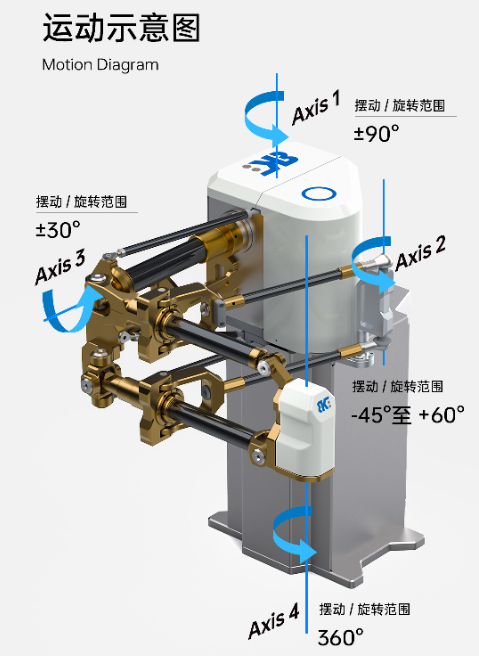
工博會現場,眾多新品同臺競技。混合運動型機器人HS系列在精度、速度、負載性能、臂展范圍、末端靈活度、輕量化等方面強勢升級,全面刷新性能高度,引爆行業關注。新品電機和減速機全部后置,使用壽命長且易維護。
這款產品高速如并聯機器人,緊湊如SCARA機器人,集眾多優點于一身,可為食品、日化、3C電子、機床沖壓、倉儲物流、五金加工等行業提供創新解決方案。
超低能耗,巔峰速度
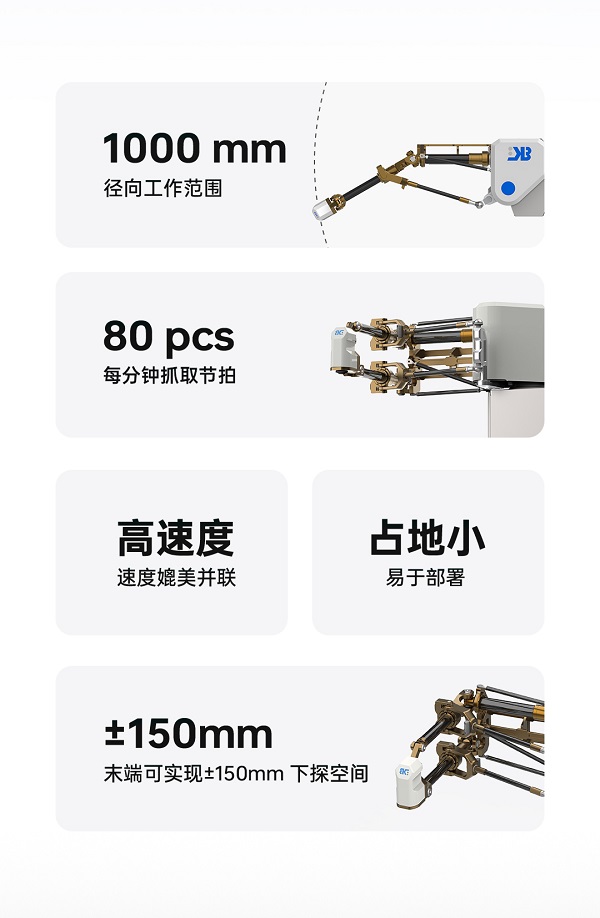
在機器人的運動控制中,節拍優化是一個非常重要的環節,它可以提高機器人的工作效率,有效降低能耗與生產成本。勃肯特機器人新品混合運動型機器人HS系列,機械手重量的80%放置在固定底座內或頂部,移動時質量慣性小,速度可提高50%,抓取節拍達80pcs,高效賦能智能制造。
雙臂協作,效率翻倍
混合運動型機器人HS系列搭載先進的雙臂協作系統,該手臂系統提供了一個圓柱形工作空間,徑向工作范圍擴至1000mm,末端可實現±150mm下探拾取范圍。相比于傳統機器人,HS系列覆蓋范圍更廣,雙臂協作更高效,適合在小范圍內部署多臺作業,可快速完成復雜的工作任務,提高生產效率,縮短生產周期。
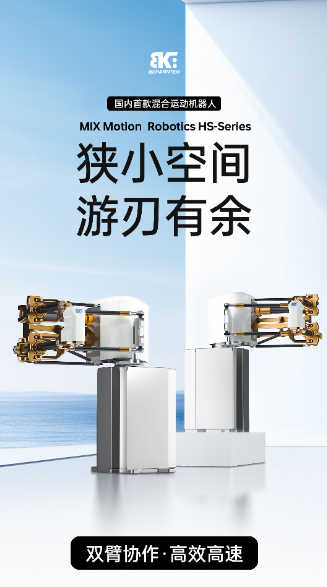
狹小空間,游刃有余
當前,工業機器人的應用場景愈加廣泛,苛刻的生產環境對機器人的體積、重量、靈活度等提出了更高的要求。勃肯特機器人自研的混合運動型機器人HS系列,占地面積小,可在狹小空間部署更緊湊的生產線。這款機器人不僅能高效地在物料進料的上下游操作,還支持動態跟蹤移動對象,以實現無縫處理。
輕量靈活,負載升級
混合運動型機器人HS系列采用輕量化的結構設計,通過減輕自重增強了動態性能、穩定效果、運動速度和靈活性,并提升了定位精度和負載性能,可快速處理不同材料、形狀、尺寸和重量的物品,最大拾取重量達到4KG。
勃肯特機器人專注于工業并聯機器人領域,在食品、醫藥、物流、日化、3C及新能源等行業與超400家國內外知名企業建立了長期穩定的合作關系。勃肯特機器人以工業并聯機器人應用為核心,貼近場景需求,深度分析各種復雜工藝,致力為客戶研發更具競爭力的產品以及個性化解決方案。

目前,勃肯特機器人已陸續研發上市并聯機器人、串并混聯機器人、SCARA機器人、BeMotion控制器和無線示教器,成為擁有全系列并聯及串并混聯工業機器人本體產品的公司。今年混合運動型機器人HS系列重磅發布,不僅進一步擴大公司產品陣容,更為行業與用戶帶來高精度、高速度、智能化解決方案。
未來,勃肯特機器人將以需求為導向,以創新為驅動,打造更多高性能產品,滿足多樣化市場需求,助力工業制造智能升級。
-
機器人
+關注
關注
210文章
28205瀏覽量
206520 -
工業機器人
+關注
關注
91文章
3351瀏覽量
92558 -
并聯機器人
+關注
關注
4文章
60瀏覽量
15207
發布評論請先 登錄
相關推薦
“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
硬核劇透!勃肯特機器人將攜新品重磅亮相2024工博會!

精準定位,激光領航——激光跟蹤儀助力服務機器人性能提升

柔性機器人與剛性機器人區別與聯系

Al大模型機器人
工業機器人的機械部分主要包括什么
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
日本研發雙足混合機器人,水下行走、急轉彎自如
機器人運動學中的非完整約束與運動模型推導






 工商網監
工商網監
評論