 低功耗智能云臺驅動板方案在電力巡檢機器人的技術應用介紹
低功耗智能云臺驅動板方案在電力巡檢機器人的技術應用介紹
電力巡檢機器人作為電力系統自動化和智能化的重要組成部分,其在提高巡檢效率、降低人力成本以及保障電力系統安全穩定運行方面發揮著重要作用。低功耗智能云臺驅動板作為電力巡檢機器人的核心組件之一,對于提升機器人的續航能力和穩定性具有關鍵意義。本文將詳細介紹低功耗智能云臺驅動板的技術方案及其在電力巡檢機器人中的應用。
1. 技術背景
電力巡檢機器人通常需要在戶外長時間工作,面臨惡劣天氣和復雜地形的挑戰。因此,機器人的能源效率和穩定性至關重要。低功耗智能云臺驅動板能夠降低機器人的能耗,延長其在野外的工作時間,同時保證巡檢任務的高效完成。
2. 技術特點
低功耗設計:通過優化電路設計和控制算法,減少能量損耗,提高能源利用效率。
智能控制:集成先進的控制算法,如PID控制,實現對云臺的精確控制。
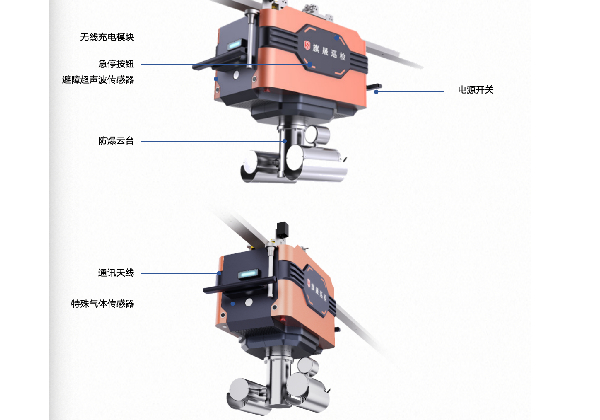
環境適應性:設計能夠適應戶外環境的防護措施,如防水、防塵、耐高低溫。
穩定性:確保在長時間工作中的穩定性和可靠性,減少故障率。
遠程控制:支持遠程控制,便于操作人員監控和操作。
3. 設計要點
電源管理:采用高效的電源管理方案,如使用低功耗微控制器和高效的電源轉換模塊。
電機選擇:選擇高效率、低能耗的電機,以減少能量損耗。
控制算法:開發智能控制算法,如自適應PID控制,提高云臺控制的精確度和響應速度。
通信協議:設計低功耗的通信協議,如使用ZigBee或LoRa,以減少通信過程中的能量損耗。
環境適應性:設計防水、防塵、耐高低溫的外殼,以適應戶外環境。
4. 技術實現
硬件設計:
選擇合適的低功耗電機和驅動器。
設計高效的電源管理電路。
集成低功耗通信模塊。
軟件編程:
編寫智能控制算法,實現對云臺的精確控制。
實現低功耗通信協議。
設計用戶友好的遠程控制界面。
系統集成:
將驅動板與機器人的其他系統(如傳感器、攝像頭)集成。
進行系統測試,確保各部分的兼容性和穩定性。
現場調試:
在實際的電力巡檢環境中進行調試。
根據實際應用的反饋進行優化。
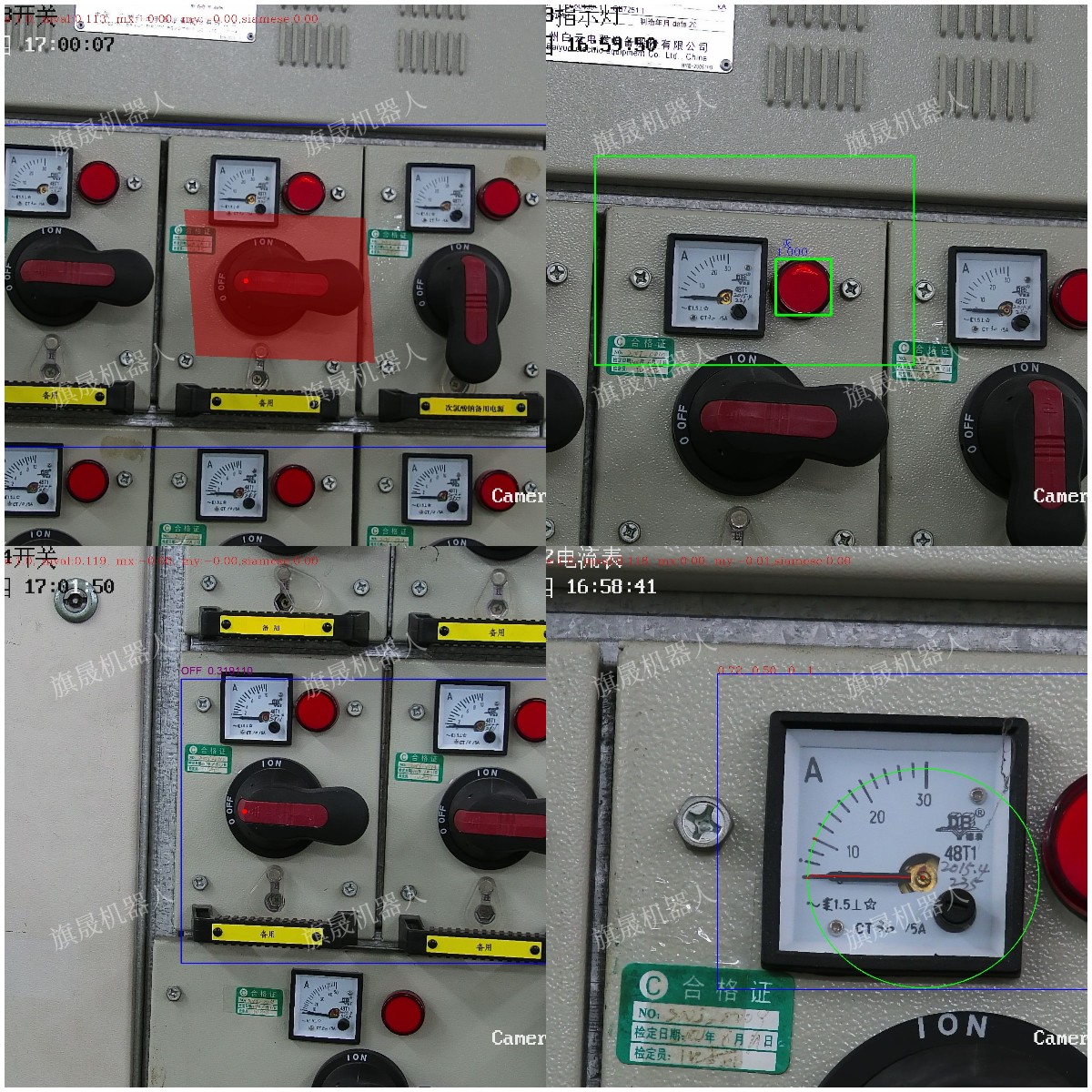
5. 實際應用案例
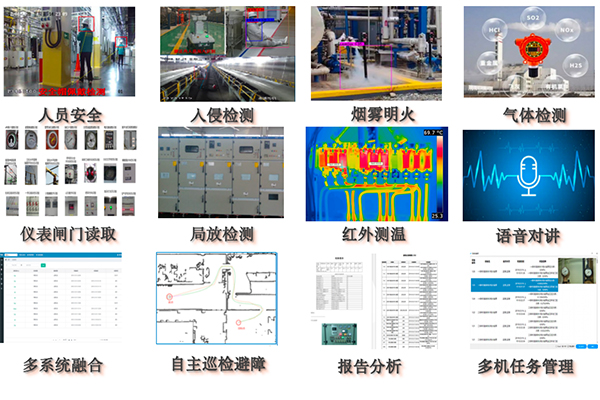
電力線路巡檢:機器人搭載低功耗智能云臺驅動板,搭載高清攝像頭,實現對電力線路的自動巡檢,及時發現線路故障和異常。
變電站監控:在變電站內,機器人可以搭載傳感器,實現對設備狀態的實時監控,如溫度、濕度、氣體濃度等。
故障診斷:機器人可以搭載紅外熱像儀,通過云臺驅動板控制,實現對電力設備的故障診斷,如過熱、短路等。
6. 設計參數
低功耗與性能的平衡:通過優化電路設計和控制算法,實現低功耗與高性能的平衡。
環境適應性:采用高性能材料和密封設計,提高機器人在惡劣環境下的適應性。
遠程控制的可靠性:通過使用穩定的通信協議和信號增強技術,提高遠程控制的可靠性。
| 云臺參數表 | |||
| 電機類型: | 步進電機,無刷直流電機,無感電機,伺服電機 | 電機軸承: | 進口 |
| 額定電壓:(V): | 12V | 中心孔直徑(mm): | >4.3 |
| 額定電流(A): | 0.7A±20% | 堵轉電流(A): | 2.2±20% |
| 額定轉速(rpm): | <1700 | 堵轉扭矩(Nm): | 0.065士20% |
| 額定扭矩(Nm): | 0.02士20% | 轉子慣量(gcm~2): | 30士20% |
| 最大空載轉速(rpm): | <3500 | 磁鐵極對數(對): | 7(6-8) |
| 三相線電阻(2): | 5士20% | 磁片/磁環: | 磁片 |
| 相間電感(mH): | 1.7士20% | 電機尺寸(mm): | Ф26.3*13 |
| 扭矩常數(Nm/A): | 0.06 | 電機重量(g): | <24g |
低功耗智能云臺驅動板在電力巡檢機器人中的應用,不僅提高了機器人的工作效率,還降低了能耗。隨著技術的不斷進步,未來的電力巡檢機器人將更加智能化、自動化,為電力行業的安全和穩定運行提供更加強大的支持。
審核編輯 黃宇
-
機器人
+關注
關注
210文章
28231瀏覽量
206614 -
電力巡檢
+關注
關注
0文章
36瀏覽量
10621
發布評論請先 登錄
相關推薦



巡檢機器人有哪些功能和應用場景


電力巡檢機器人廠家-旗晟機器人
綜合管廊掛軌巡檢機器人:安全高效管理的新力量
巡檢機器人的分類和種類有哪些

巡檢機器人有哪些功能和作用?





 工商網監
工商網監
評論