 DDS通信中間件——DCPS規范(上)
DDS通信中間件——DCPS規范(上)
DDS通信中間件——DCPS規范(上)
本篇文章繼續和大家分享一下對DDS這套規范的理解。預期本系列文章將包括以下內容陸續更新:
1. DDS規范概述
2.DCPS規范解讀
3. DDS-XTypes與IDL解讀
4. RTPS規范解讀
5. DDS安全規范解讀
6. DDS-RPC規范解讀
7. DDS-TSN規范解讀
8. DDS-XRCE規范解讀
DCPS規范分為上下兩篇,本篇內容先講模型概述、接口定義和開發示例,下篇再來講QoS定義。
1. 概述
DCPS(Data-CentricPublish-Subscribe,以數據為中心的發布/訂閱)規范是DDS系列規范最初也是最核心的規范,在某些場合DDS規范指的就是DCPS規范。
2. DCPS-PIM
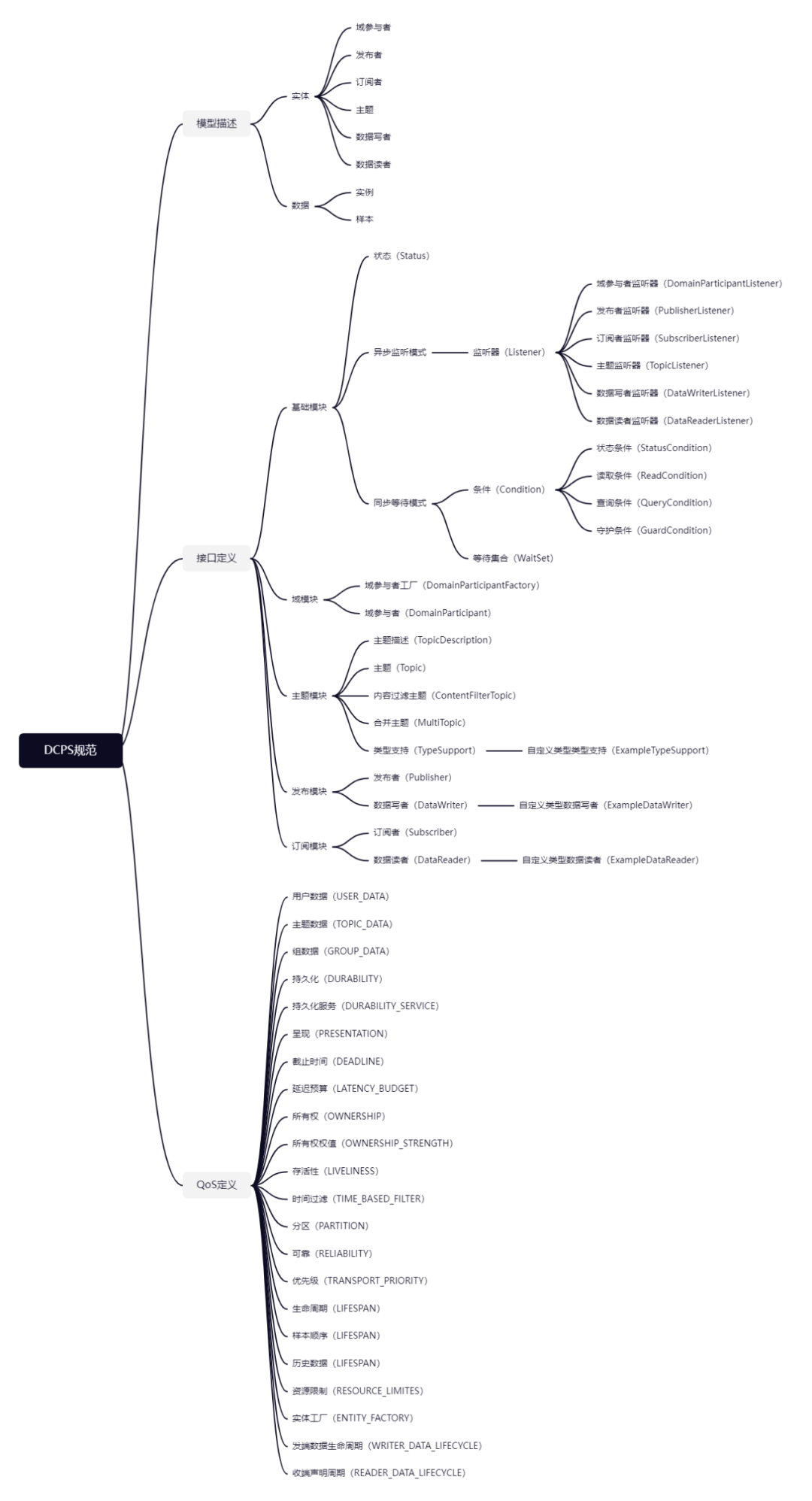
DCPS的內容總結在下面這張圖中,主要分為三大塊,這篇文章也將按照導圖中的內容依次介紹:
- ? 模型描述,介紹模型中涉及的概念;
- ? 接口描述,分模塊定義類并定義接口形式及接口功能描述;
- ? QoS定義,定義22種QoS的功能及其配置方式。
2.1. 模型描述
2.1.1. 實體概念
- 基于主題的發布/訂閱模型
- 系統的數據按照主題來分類;
- 發布端發布主題數據;
- 訂閱端訂閱主題數據;
- 發布端發布的主題數據后,相同主題的訂閱端都能收到。
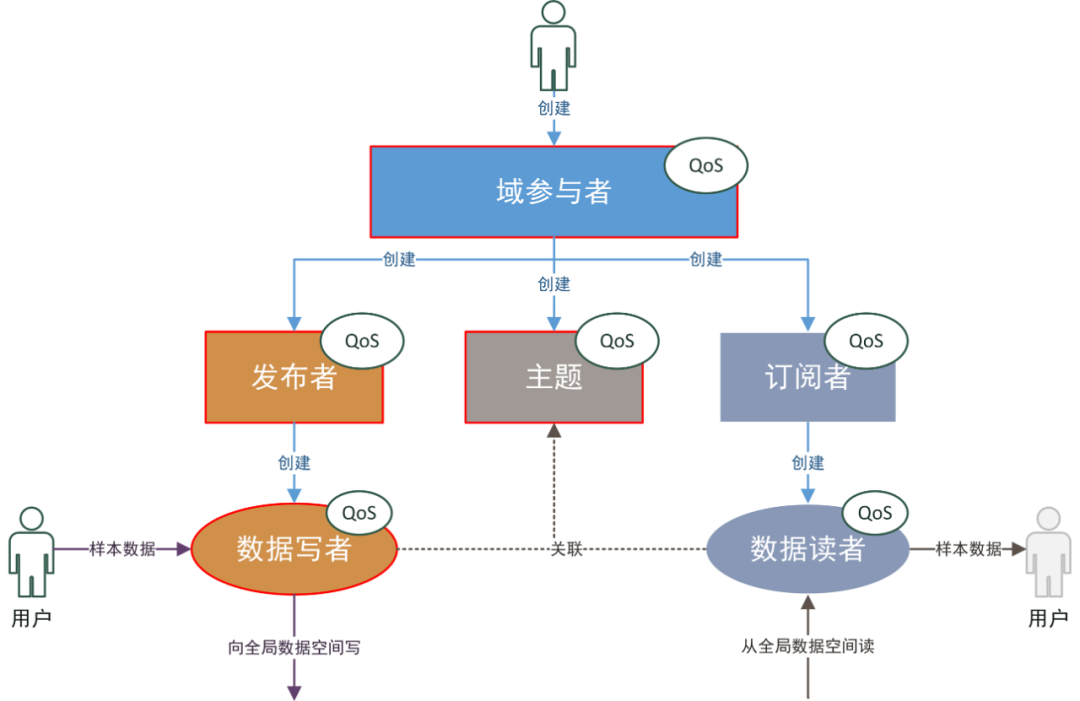
- DCPS實體模型定義了三層實體,如下圖所示
- 域參與者(DomainParticipant)
- 這個實體看上去和發布/訂閱模型沒啥關系,實際上也沒啥關系。主要是DDS里面定義域的概念用來隔離通信,相同域內實體互相通信,不同域間隔離;
- 這是應用參加DDS系統通信的入口實體,創建某個域下的域參與者表示:“我想要參與某個域進行通信(是發布還是訂閱后面再告訴你)”。
- 發布者(Publisher)
- 這個最好理解,應用創建發布者表示:“我需要發布數據(具體發布什么主題數據,后面再告訴你)”;
- 訂閱者(Subscriber)
- 這個也很好理解,應用創建訂閱者表示:“我需要訂閱數據(具體訂閱什么主題數據,后面再告訴你)”;
- 主題(Topic)
- 主題用來描述一類數據,創建主題表示:“我有這么一類數據需要交互”;
- 定義主題需要什么信息,后面章節詳細介紹;
- 數據寫者(DataWriter)
- 數據寫者關聯一個且僅一個主題實體,用來向全局數據空間寫指定主題的數據;
- 應用創建數據寫者表示:“我需要發布XX主題數據。”
- 數據讀者(DataReader)
- 數據讀者關聯一個且僅一個主題實體,用來從全局數據空間讀指定主題的數據;
- 應用創建數據讀者表示:“我需要訂閱XX主題數據。”
2.1.2. 數據描述
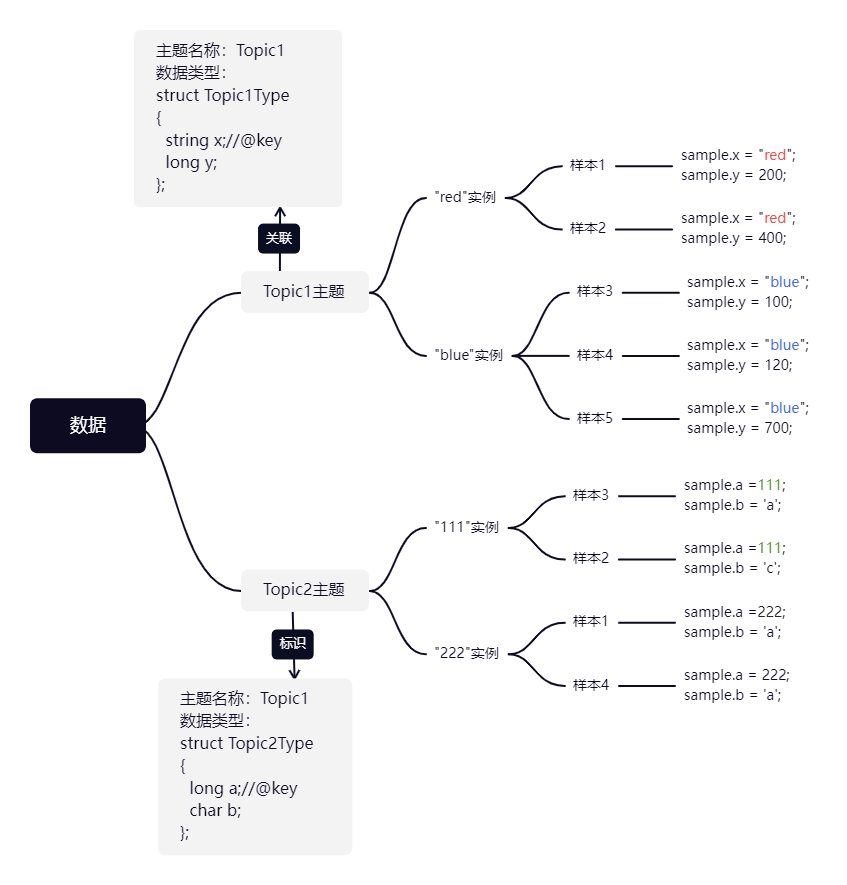
DCPS模型中有幾個重要的概念來描述系統中傳輸的數據,如下圖所示自頂向下分為三層來描述系統中交互的數據。
| 概念 | 說明 | 標識 |
|---|---|---|
| 主題 | 最大類,域內唯一的主題名稱,并關聯1個數據類型。 | 主題名+類型 |
| 實例 | 主題數據中key成員相同的數據的集合,即使用key成員進一步區分主題數據,可以理解成“子主題”。 | InstanceHandle_t |
| 樣本 | 每次向DDS發送一次數據產生一個數據樣本。 | 序列號 |
2.2. 接口描述
2.2.1. 基礎模塊
基礎模塊包含了DCPS的接口定義的幾個重要的原則:
實體管理(創建/刪除/查詢)采用工廠模式,父實體為子實體的工廠,層級關系參見2.2.1節;
每個實體會關聯一組內部的狀態;
狀態可以通過實體提供的查詢接口查詢獲取;
狀態可以通過監聽器由底層回調獲取;
狀態可以通過“條件-等待”的方式同步阻塞獲取;
每個實體都會關聯一系列的QoS配置。
2.2.1.1. 實體狀態
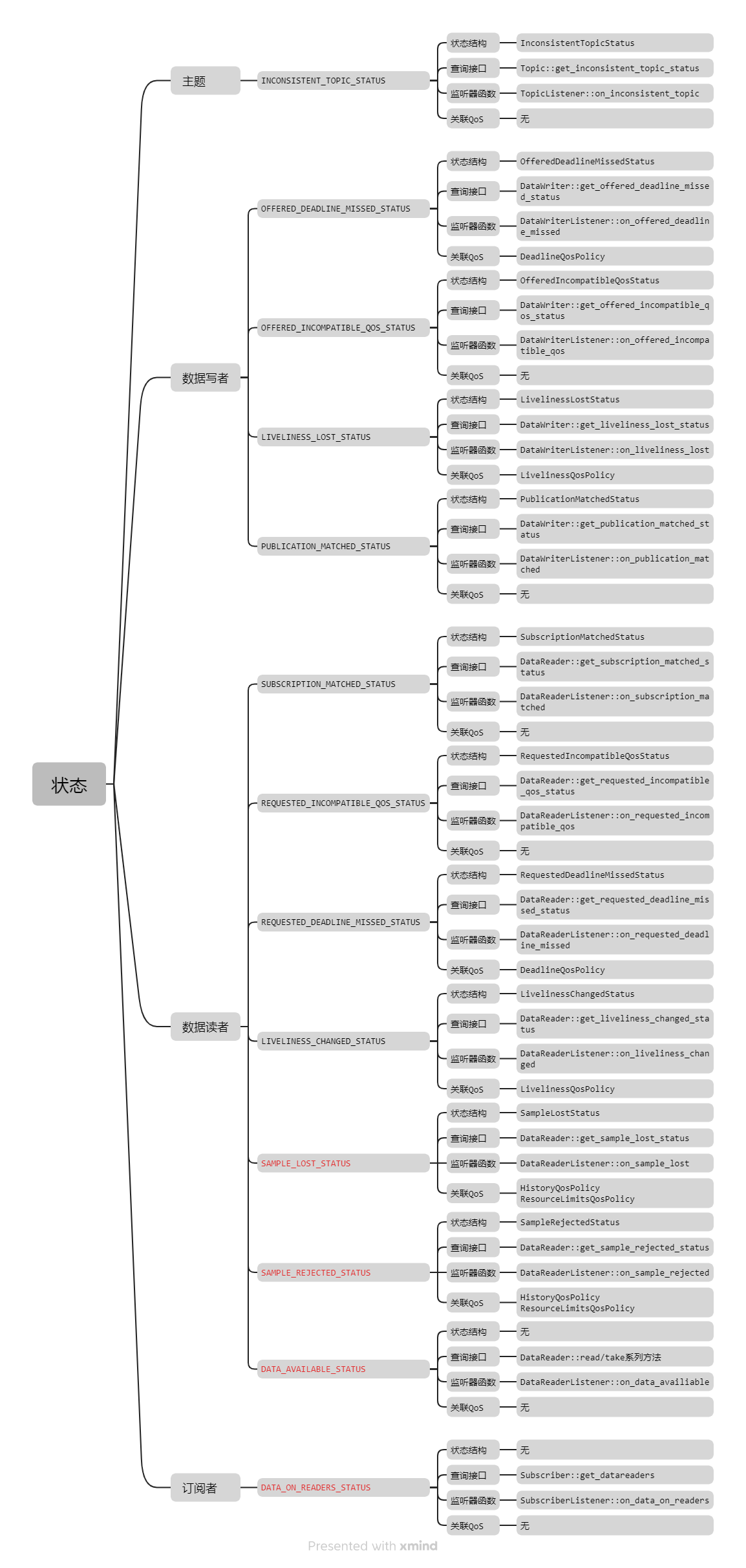
實體狀態表示DDS為用戶關心的底層事件所維護的狀態,例如數據寫者關聯成功匹配遠程數據讀者、檢測到數據讀者數據樣本丟失、檢測到主題的類型不兼容等。每個實體會關聯一系列的代表該實體“通信狀態”的狀態對象。實體關聯的狀態參見下圖。狀態結構體中包含的數值可以提供更多關于該狀態的信息。
2.2.1.2. 獲取實體狀態
狀態分為兩種類型:
- 簡單通信狀態 :除了表明狀態是否改變的標識還包含保存當前狀態的對應結構體。
- 讀通信狀態:讀通信狀態更像一個事件,除了是否發生以外沒有其他聲明。只有兩個狀態是讀通信狀態:#DATA_AVAILABLE_STATUS 和 #DATA_ON_READERS_STATUS 。
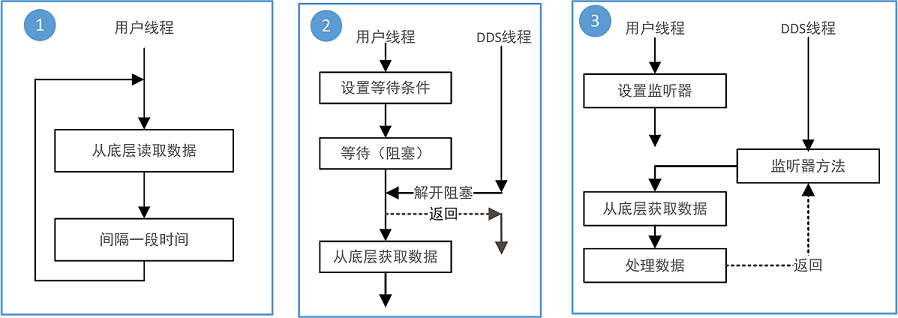
下面分別描述獲取實體簡單通信狀態有三種方式 :
- 同步獲取實體狀態,參見上圖最左邊圖,用戶想要獲取某個狀態的當前值時,主動調用該狀態有關的實體方法,獲取各實體狀態的實體方法參見2.2.1.1中的圖;
- 同步等待并獲取實體狀態,參見上圖中間的圖,用戶設置等待條件,并調用DDS接口進行阻塞等待,在DDS底層檢測到該狀態發生變化后,解開阻塞,用戶再通過方法1獲取該狀態;
- 異步回調實體狀態,參見上圖右邊的圖,該方式為通過監聽器異步回調狀態 ,用戶為實體設置相應的監聽器(再進行其他的業務邏輯),DDS底層檢測到該狀態變化時,通過回調監聽器的相應方法,用戶即可獲取該狀態的值,各實體狀態關聯的回調方法參見參見2.2.1.1中的圖。
2.2.1.3. 條件-等待
DDS使用條件( Condition )以及等待( WaitSet )來實現同步等待模型,其中每個條件均有一個觸發狀態,不同類型的狀態的觸發條件不一樣,可以將一個或者多個條件加入到等待集合中,即允許用戶同時等待多個狀態的集合中的某個狀態觸發。條件的類型及其相關的操作參見,使用條件等待的詳細例子參見:
| 說明 | 狀態條件( StatusCondition ) | 讀取條件 ( ReadCondition ) | 監視條件( GuardCondition ) |
|---|---|---|---|
| 簡介 | 該條件用于獲取實體狀態改變 | 該條件用于獲取數據讀者的數據狀態改變 | 該條件用于手動解開阻塞的條件集合 |
| 獲取方式 | 每個實體均會關聯一個該條件,調用 Entity::get_statuscondition 方法獲取 | 由數據讀者作為該條件的工廠, DataReader::create_readcondition 、 DataReader::delete_readcondition | 用戶負責狀態的生命周期管理 (new/delete) |
| 觸發方式 | StatusCondition::set_enabled_statuses 設置的關心的狀態發生改變 | 數據讀者底層有該狀態所表示的數據樣本的時候觸發 | 用戶通過監視條件的接口手動設置 |
| 觸發后的動作 | 首先測試發生改變的狀態,再調用相應的狀態獲取方法獲取 | 調用數據讀者的讀取數據方法獲取改變的數據 DataReader::read_w_condition DataReader::take_w_condition | 無 |
(向左滑動)
2.2.1.4. 監聽器
DDS通過監聽器提供底層狀態事件異步回調的機制,每個實體狀態在相應的實體監聽器中均有相應的回調函數與之對應,實體回調函數與實體狀態的對應關系參見 2.2.1.1中的圖 。下圖顯示了DDS中各個監聽器的繼承關系,即父實體的監聽器繼承于子類的監聽器,這就意味著父實體監聽器能夠獲取所有子實體的狀態變化。

2.2.2. 域模塊
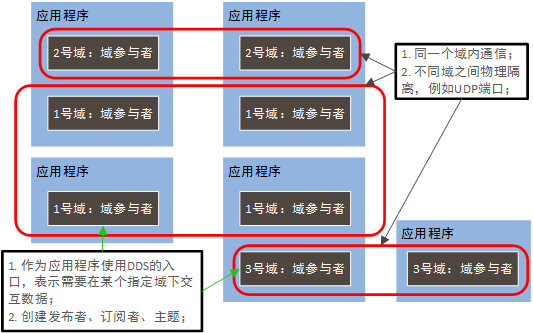
在發布訂閱模型中,理論上每個計算機上的中間件都需要掌握全局的節點信息,以提供分布式的數據傳輸服務。但在實際應用中,可能存在需要隔離的情況,例如網絡中的節點數量過于龐大,掌握全局信息會付出巨大的代價,或者從屬于不同分區的小組之間不希望互相干擾。為了解決隔離的問題,DDS引入了域的概念。每個參與通信的計算機都可以加入一個或多個域,相同域內的節點可以互相通信,不同域之間的節點則不會有數據交互。DDS中使用 DomainId_t 來唯一標識一個域。域參與者實體是DDS的入口,用戶創建一個域參與者表示該程序想要在指定的域中交互數據。域模型示意圖參見下圖,一個應用程序可以在多個域中交互數據。
2.2.2.1. 域參與者工廠
域參與者實體的工廠為全局單例的域參與者工廠( DomainParticipantFactory ),域參與者工廠的主要功能參見下表。
| 功能 | 接口 |
|---|---|
| 單例管理 | DomainParticipantFactory::get_instance |
| DomainParticipantFactory::finalize_instance | |
| 作為域參與者的工廠 | DomainParticipantFactory::create_participant |
| DomainParticipantFactory::delete_participant | |
| DomainParticipantFactory::lookup_participant | |
| DomainParticipantFactory::get_default_participant_qos | |
| DomainParticipantFactory::set_default_participant_qos | |
| 自身QoS管理 | DomainParticipantFactory::set_qos |
| DomainParticipantFactory::get_qos |
(向左滑動)
2.2.2.2. 域參與者
域參與者( DomainParticipant ),主要接口的功能參見下表,此外,域參與者內部還實現發現協議、根據線程模型配置初始化線程、創建定時器、申請并創建網絡傳輸需要的資源,并監聽對應的網絡端口,負責處理網絡報文等,域參與者所需的資源較多,內部邏輯復雜,因而在一個應用中應盡可能的減少域參與者的創建。
| 功能 | 接口 |
|---|---|
| 實體功能 | DomainParticipant::enable |
| DomainParticipant::set_listener | |
| DomainParticipant::get_listener | |
| DomainParticipant::set_qos | |
| DomainParticipant::get_qos | |
| DomainParticipant::get_instance_handle | |
| DomainParticipant::get_status_changes | |
| DomainParticipant::get_statuscondition | |
| 作為實體工廠 | DomainParticipant::delete_contained_entities |
| DomainParticipant::contains_entity | |
| 作為主題實體工廠 | DomainParticipant::create_topic |
| DomainParticipant::delete_topic | |
| DomainParticipant::get_default_topic_qos | |
| DomainParticipant::set_default_topic_qos | |
| DomainParticipant::lookup_topicdescription | |
| DomainParticipant::find_topic | |
| DomainParticipant::create_contentfilteredtopic | |
| DomainParticipant::delete_contentfilteredtopic | |
| 作為發布者實體工廠 | DomainParticipant::create_publisher |
| DomainParticipant::delete_publisher | |
| DomainParticipant::get_default_publisher_qos | |
| DomainParticipant::set_default_publisher_qos | |
| DomainParticipant::get_publishers | |
| 作為訂閱者實體工廠 | DomainParticipant::create_subscriber |
| DomainParticipant::delete_subscriber | |
| DomainParticipant::get_default_subscriber_qos | |
| DomainParticipant::set_default_subscriber_qos | |
| DomainParticipant::get_subscribers | |
| 內置實體管理 | DomainParticipant::get_builtin_subscriber |
| 通信管理 | DomainParticipant::ignore_participant |
| DomainParticipant::ignore_publication | |
| DomainParticipant::ignore_subscription | |
| 域信息查詢 | DomainParticipant::get_domain_id |
| DomainParticipant::get_discovered_participants | |
| DomainParticipant::get_discovered_participant_data | |
| DomainParticipant::get_discovered_topics | |
| DomainParticipant::get_discovered_topic_data | |
| 存活性管理 | DomainParticipant::assert_liveliness |
2.2.3. 主題模塊
| 功能 | 接口 |
|---|---|
| 實體功能 | Topic::enable |
| Topic::set_listener | |
| Topic::get_listener | |
| Topic::get_instance_handle | |
| Topic::get_status_changes | |
| Topic::get_statuscondition | |
| Topic::set_qos | |
| Topic::get_qos | |
| 獲取主題信息 | Topic::get_type_name |
| Topic::get_name |
2.2.4. 發布模塊
2.2.4.1. 發布者
| 功能 | 接口 |
|---|---|
| 實體功能 | Publisher::enable |
| Publisher::set_listener | |
| Publisher::get_listener | |
| Publisher::get_instance_handle | |
| Publisher::get_status_changes | |
| Publisher::get_statuscondition | |
| Publisher::get_participant | |
| Publisher::set_qos | |
| Publisher::get_qos | |
| 作為數據寫者的工廠 | Publisher::create_datawriter |
| Publisher::delete_datawriter | |
| Publisher::lookup_datawriter | |
| Publisher::delete_contained_entities | |
| Publisher::set_default_datawriter_qos | |
| Publisher::get_default_datawriter_qos | |
| Publisher::copy_from_topic_qos | |
| 數據發布控制 | Publisher::begin_coherent_changes |
| Publisher::end_coherent_changes | |
| Publisher::wait_for_acknowledgments | |
| Publisher::suspend_publications | |
| Publisher::resume_publications |
2.2.4.2. 數據寫者
數據寫者主要的功能描述參見下表,數據寫者提供強類型安全的接口,該接口由DDS編譯器根據IDL中定義的類型自動生成,其中類型無關的接口參見 DataWriter 、類型相關的接口參見 ExampleDataWriter 接口說明,典型的發布過程如下 。
| 功能 | 接口 |
|---|---|
| 實體功能 | DataWriter::enable |
| DataWriter::set_listener | |
| DataWriter::get_listener | |
| DataWriter::get_instance_handle | |
| DataWriter::get_status_changes | |
| DataWriter::get_statuscondition | |
| DataWriter::set_qos | |
| DataWriter::get_qos | |
| 數據發送 | ExampleDataWriter::write |
| ExampleDataWriter::write_w_timestamp | |
| ExampleDataWriter::write_w_dst | |
| 數據實例管理 | ExampleDataWriter::register_instance |
| ExampleDataWriter::register_instance_w_timestamp | |
| ExampleDataWriter::unregister_instance | |
| ExampleDataWriter::unregister_instance_w_timestamp | |
| ExampleDataWriter::dispose | |
| ExampleDataWriter::dispose_w_timestamp | |
| ExampleDataWriter::get_key_value | |
| ExampleDataWriter::lookup_instance | |
| 實體狀態查詢 | DataWriter::get_liveliness_lost_status |
| DataWriter::get_offered_deadline_missed_status | |
| DataWriter::get_offered_incompatible_qos_status | |
| DataWriter::get_publication_matched_status | |
| 數據寫者信息查詢 | DataWriter::get_topic |
| DataWriter::get_publisher | |
| 匹配對端信息查詢 | DataWriter::get_matched_subscriptions |
| DataWriter::get_matched_subscription_data | |
| 存活性管理 | DataWriter::assert_liveliness |
| 其他 | DataWriter::wait_for_acknowledgments |
| DataWriter::flush |
(向左滑動)
2.2.5. 訂閱模塊
2.2.5.1. 訂閱者
| 功能 | 接口 |
|---|---|
| 實體功能 | Subscriber::enable |
| Subscriber::set_listener | |
| Subscriber::get_listener | |
| Subscriber::get_instance_handle | |
| Subscriber::get_status_changes | |
| Subscriber::get_statuscondition | |
| Subscriber::get_participant | |
| Subscriber::set_qos | |
| Subscriber::get_qos | |
| 作為數據讀者的工廠 | Subscriber::create_datareader |
| Subscriber::delete_datareader | |
| Subscriber::lookup_datareader | |
| Subscriber::delete_contained_entities | |
| Subscriber::set_default_datareader_qos | |
| Subscriber::get_default_datareader_qos | |
| Subscriber::copy_from_topic_qos | |
| 數據獲取方式 | Subscriber::begin_access |
| Subscriber::end_access | |
| Subscriber::get_datareaders | |
| Subscriber::notify_datareaders |
(向左滑動)
2.2.5.2. 數據讀者
數據讀者的類型無關功能描述參見下表,數據讀者提供強類型安全的接口,該接口由DDS編譯器根據IDL中定義的類型自動生成,其中類型無關的接口參見DataReader 、類型相關的接口參見 ExampleDataReader 接口說明。
| 功能 | 接口 |
|---|---|
| 實體功能 | DataReader::enable |
| DataReader::set_listener | |
| DataReader::get_listener | |
| DataReader::get_instance_handle | |
| DataReader::get_status_changes | |
| DataReader::get_statuscondition | |
| DataReader::set_qos | |
| DataReader::get_qos | |
| 實體狀態查詢 | DataReader::get_sample_lost_status |
| DataReader::get_sample_rejected_status | |
| DataReader::get_subscription_matched_status | |
| DataReader::get_liveliness_changed_status | |
| DataReader::get_requested_deadline_missed_status | |
| DataReader::get_requested_incompatible_qos_status | |
| 數據讀者信息查詢 | DataReader::get_topicdescription |
| DataReader::get_subscriber | |
| 匹配對端信息查詢 | DataReader::get_matched_publications |
| DataReader::get_matched_publication_data | |
| 讀取狀態管理 | DataReader::create_readcondition |
| DataReader::create_querycondition | |
| DataReader::delete_readcondition | |
| DataReader::delete_contained_entities | |
| 其他 | DataReader::wait_for_historical_data |
(向左滑動)
2.2.5.3. 獲取主題數據
當數據樣本到達訂閱端時,DDS底層會根據主題匹配信息分發給不同的數據讀者去處理,當完成處理(資源限制等QoS配置)時,數據讀者將把該數據樣本存儲在底層的隊列中,并通知用戶,再等待用戶通過接口來取出該數據樣本,DDS通知用戶數據到達的方式有兩種:異步監聽方式以及同步等待方式,用戶通過數據讀者的讀取數據接口訪問底層隊列中的數據樣本,這些接口的摘要信息參見下表,詳細信息參見相應的接口說明。用戶可以通過多種方式訪問底層存儲的隊列數據:
1. 提供樣本深拷貝以及零拷貝(僅提供數據樣本在底層隊列中的指針或者引用)兩種方式;
2. 指定最大獲取數量;
3. 訪問處于指定狀態的樣本,樣本狀態由 SampleStateKind 、 ViewStateKind 、 InstanceStateKind 三個狀態定義;
4. 按照數據實例訪問,包括指定數據實例以及按數據實例順序;
5. 按照樣本的順序依次訪問;
6. 讀取/取出兩種訪問方法,其中讀取操作不從底層隊列中刪除,而取出操作則從底層維護的樣本中刪除。
| 分類 | 接口 | 說明 |
|---|---|---|
| 讀取系列 | ExampleDataReader::read | 方式1 & 方式2 & 方式3 |
| ExampleDataReader::read_next_sample | 方式5 | |
| ExampleDataReader::read_instance | 方式1 & 方式2 & 方式3 & 方式4 | |
| ExampleDataReader::read_next_instance | 方式1 & 方式2 & 方式3 & 方式4 | |
| ExampleDataReader::read_w_condition | 同 ExampleDataReader::read | |
| ExampleDataReader::read_next_instance_w_condition | 同 ExampleDataReader::read_next_instance | |
| 取出系列 | ExampleDataReader::take | 方式1 & 方式2 & 方式3 |
| ExampleDataReader::take_next_sample | 方式5 | |
| ExampleDataReader::take_instance | 方式1 & 方式2 & 方式3 & 方式4 | |
| ExampleDataReader::take_next_instance | 方式1 & 方式2 & 方式3 & 方式4 | |
| ExampleDataReader::take_w_condition | 同 ExampleDataReader::take | |
| ExampleDataReader::take_next_instance_w_condition | 同 ExampleDataReader::take_next_instance | |
| 歸還空間 | ExampleDataReader::return_loan | 配合實現零拷貝 |
(向左滑動)
2.3. QoS定義
下一期再繼續分享。
3. PSM-IDL
因為上面定義的是平臺/技術無關的模型,在這一章OMG用IDL給出了DCPS的一種定義,所謂PIM就是只規定形式和行為,具體數據結構在PSM中給出,這是OMG DDS規范的一般套路,打個比方,在PIM中會定義 InstanceHandle_t 這個結構的含義是用來唯一標識實體或者數據實例,但是不會規定如何來實現,在PSM中會定義 InstanceHandle_t 就是8個字節或者16個字節。
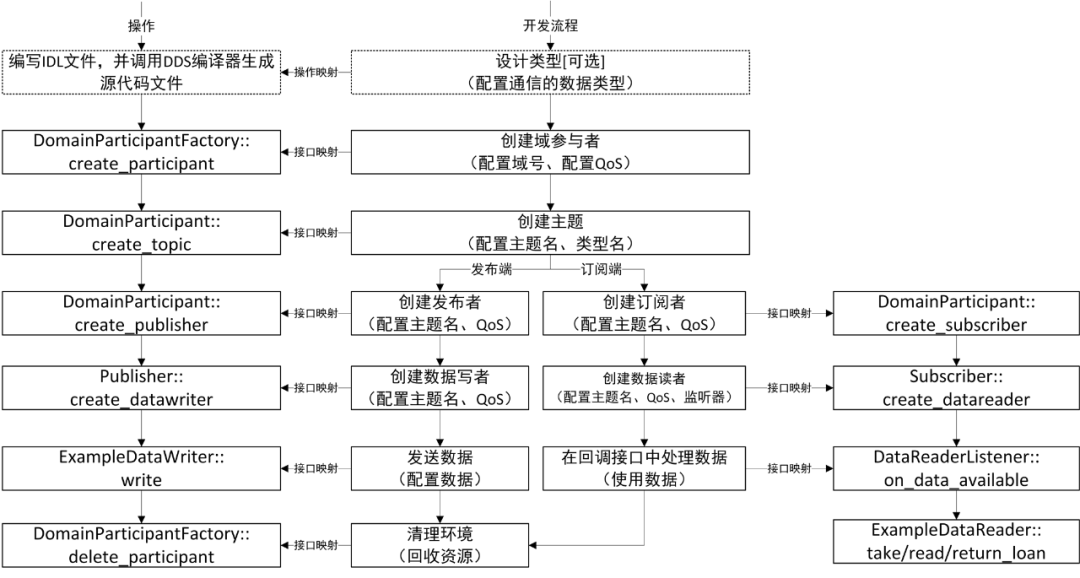
4. 開發流程
5. 代碼示例
5.1. 發布端
#include"DomainParticipantFactory.h"
#include"DomainParticipant.h"
#include"DefaultQos.h"
#include"Publisher.h"
#include"DataWriter.h"
#include"Topic.h"
#include"Foo.h"
#include"FooDataWriter.h"
#include"FooTypeSupport.h"
#include"ZRSleep.h"
#include
intmain()
{
//域
DomainId_tdomainId=11;
DomainParticipantFactory*factory=DomainParticipantFactory::get_instance();
//域參與者
DomainParticipant*participant=factory->create_participant(
domainId,
DOMAINPARTICIPANT_QOS_DEFAULT,
NULL,STATUS_MASK_NONE);
if(NULL==participant)
{
printf("createparticipantfailed.\n");
return-1;
}
//注冊類型
constChar*type_name=FooTypeSupport::get_instance()->get_type_name();
if(type_name==NULL)
{
return-1;
}
ReturnCode_trtn=FooTypeSupport::get_instance()->register_type(participant,type_name);
if(rtn!=RETCODE_OK)
{
printf("registertypefailed.\n");
return-1;
}
//創建主題
Topic*topic=participant->create_topic("example",type_name,TOPIC_QOS_DEFAULT,NULL,STATUS_MASK_NONE);
if(topic==NULL)
{
printf("createtopicfailed.\n");
return-1;
}
//創建發布端
Publisher*publisher=participant->create_publisher(
PUBLISHER_QOS_DEFAULT,
NULL,STATUS_MASK_NONE);
if(publisher==NULL)
{
printf("createpublisherfailed.\n");
return-1;
}
//創建數據寫者
DataWriterQoswriter_qos;
publisher->get_default_datawriter_qos(writer_qos);
writer_qos.history.depth=5;
DataWriter*writer=publisher->create_datawriter(
topic,writer_qos,NULL,STATUS_MASK_NONE);
FooDataWriter*_writer=dynamic_cast(writer);
if(writer==NULL)
{
printf("createdatawriterfailed.\n");
return-1;
}
//創建數據樣本
Foosample;
while(true)
{
//在此處修改數據樣本的值
//發布數據樣本
_writer->write(sample,HANDLE_NIL_NATIVE);
ZRSleep(1000);
}
return0;
}
(向左滑動)
5.2. 訂閱端
#include"DomainParticipantFactory.h"
#include"DomainParticipant.h"
#include"DefaultQos.h"
#include"Subscriber.h"
#include"DataReader.h"
#include"Topic.h"
#include"DataReaderListener.h"
#include"Foo.h"
#include"FooDataReader.h"
#include"FooTypeSupport.h"
#include"ZRSleep.h"
#include
//繼承DataReaderListener
classMylistener:publicDataReaderListener
{
//回調函數
voidon_data_available(DataReader*the_reader)
{
printf("receiveddata.\n");
FooDataReader*foo_reader=dynamic_cast(the_reader);
if(foo_reader==NULL)
{
printf("castreaderfailed.\n");
return;
}
FooSeqdata_values;
SampleInfoSeqsample_infos;
ReturnCode_trtn;
rtn=foo_reader->take(data_values,
sample_infos,
MAX_INT32_VALUE,
ANY_SAMPLE_STATE,
ANY_VIEW_STATE,
ANY_INSTANCE_STATE);
if(RETCODE_ERROR==rtn)
{
printf("takefailed.\n");
return;
}
if(RETCODE_NO_DATA==rtn)
{
printf("nodata.\n");
return;
}
for(inti=0;ilength();i++)
{
if(sample_infos[i].valid_data)
{
FooPrintData(&data_values[i]);
}
}
foo_reader->return_loan(data_values,sample_infos);
}
};
intmain()
{
//域
DomainId_tdomainId=11;
DomainParticipantFactory*factory=DomainParticipantFactory::get_instance();
//域參與者
DomainParticipant*participant=factory->create_participant(
domainId,
DOMAINPARTICIPANT_QOS_DEFAULT,
NULL,STATUS_MASK_NONE);
if(NULL==participant)
{
printf("createparticipantfailed.\n");
return-1;
}
//注冊類型
constChar*type_name=FooTypeSupport::get_instance()->get_type_name();
if(NULL==type_name)
{
return-1;
}
ReturnCode_trtn=FooTypeSupport::get_instance()->register_type(participant,type_name);
if(RETCODE_OK!=rtn)
{
printf("registertypefailed.\n");
return-1;
}
//創建主題
Topic*topic=participant->create_topic("example",type_name,TOPIC_QOS_DEFAULT,NULL,STATUS_MASK_NONE);
if(NULL==topic)
{
printf("createtopicfailed.\n");
return-1;
}
//創建訂閱端
Subscriber*subscriber=participant->create_subscriber(
SUBSCRIBER_QOS_DEFAULT,
NULL,STATUS_MASK_NONE);
if(NULL==subscriber)
{
printf("createsubscriberfailed.\n");
return-1;
}
//監聽器
Mylistener*listener=newMylistener;
//創建數據讀者
DataReaderQosreader_qos;
subscriber->get_default_datareader_qos(reader_qos);
reader_qos.history.depth=5;
DataReader*reader=subscriber->create_datareader(
topic,reader_qos,listener,STATUS_MASK_ALL);
FooDataReader*_reader=dynamic_cast(reader);
if(NULL==reader)
{
printf("createdatareaderfailed.\n");
return-1;
}
while(true)
{
ZRSleep(1000);
}
return0;
}
(向左滑動)
-
通信
+關注
關注
18文章
5977瀏覽量
135870 -
中間件
+關注
關注
0文章
65瀏覽量
18155 -
DDS
+關注
關注
21文章
632瀏覽量
152552
發布評論請先 登錄
相關推薦
一種嵌入式系統通信中間件的設計
中間件在產業鏈協同平臺的應用和研究
基于中間件技術的異構機器人系統設計及實現
基于JMS的RFID中間件設計與實現

NGB中間件標準考慮因素
常見的中間件有哪些?匯總解析
物聯網軟件系統中的RFID中間件介紹

汽車軟件通信中間件iceoryx和它的零拷貝技術

自動駕駛通信中間件






 工商網監
工商網監
評論