 物聯網行業中的電機家族成員解密(二)_步進電機篇
物聯網行業中的電機家族成員解密(二)_步進電機篇
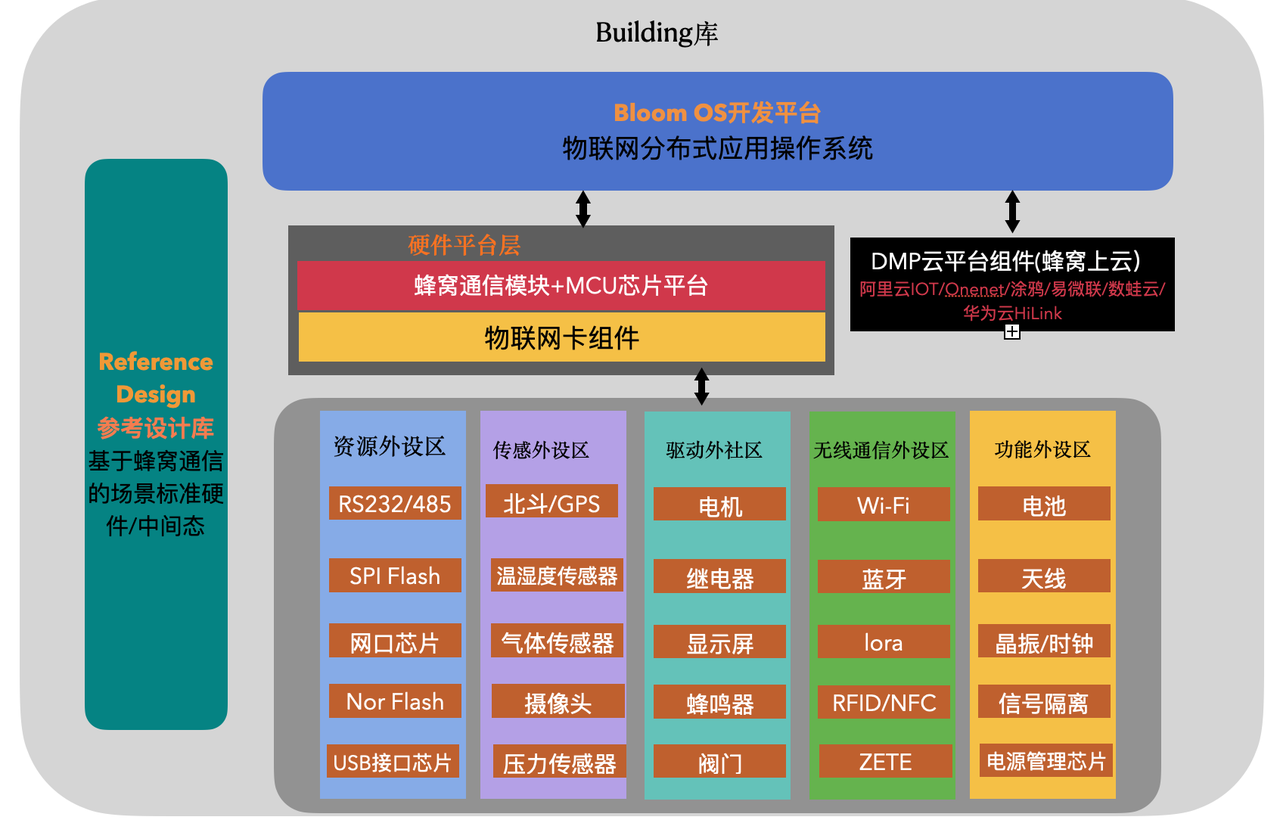
物聯網系統中使用電機可以提高設備的智能化水平,實現遠程控制、自動化控制、故障診斷、預測維護等功能,從而提高生產效率、降低維護成本、提高生活質量。
物聯網系統中的電機應用方案通常涉及到電機控制、監測和維護等方面。以下是一些常見的物聯網電機應用方案:
智能家居:在智能家居中,物聯網電機可以用于控制窗簾、窗戶、門鎖等設備的開關。通過物聯網技術,可以實現遠程控制、定時控制、場景控制等功能,提高家居的智能化水平。
工業自動化:在工業自動化中,物聯網電機可以用于控制生產線、物流輸送線等設備的運行。通過物聯網技術,可以實現設備的遠程監控、故障診斷、預測維護等功能,提高生產效率和降低維護成本。
智能交通:在智能交通中,物聯網電機可以用于控制信號燈、路燈、廣告牌等設備的開關。通過物聯網技術,可以實現設備的遠程控制、自適應控制等功能,提高交通的安全性和效率。
智能農業:在智能農業中,物聯網電機可以用于控制灌溉系統、通風系統、遮陽系統等設備的運行。通過物聯網技術,可以實現設備的遠程監控、自動化控制等功能,提高農業的生產效率和降低勞動成本。
本文會再為大家詳解電機家族中的重要成員——步進電機。
步進電機的定義
步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機。每輸入一個脈沖信號,轉子就轉動一個角度或前進一步,這個固定的一個角度稱為步距角,其輸出的角位移或線位移與輸入的脈沖數成正比,轉速與脈沖頻率成正比。因此,步進電動機又稱脈沖電動機。
根據電源的不同,電機可以分為交流電機和直流電機。而步進電機則屬于直流電機,因為步進電機有一個固定的磁極方向,需要反復改變電流的流向才能實現旋轉,而直流電機則是利用直流電流產生磁力而旋轉的。雖然步進電機需要使用驅動器產生脈沖信號,但仍然是屬于直流電機的一種。總之,步進電機是屬于直流電機的一種,它具有精準控制、高速穩定運動、重量小等特點,適用于許多精密運動控制領域。
在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響。
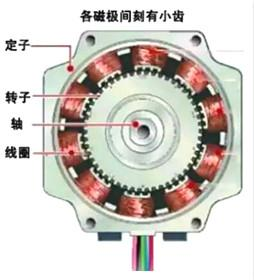
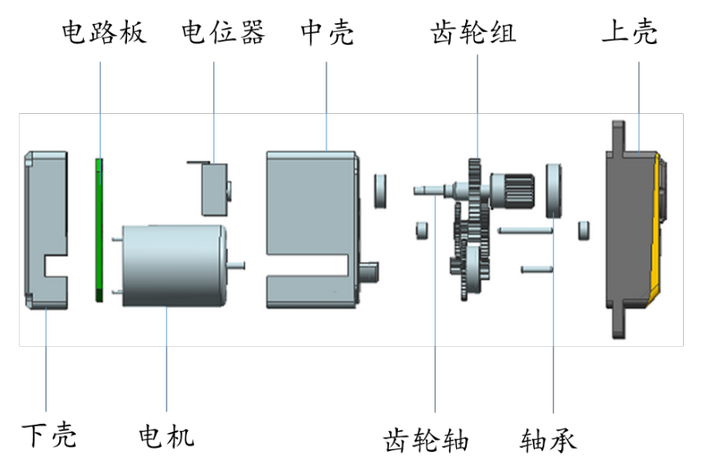
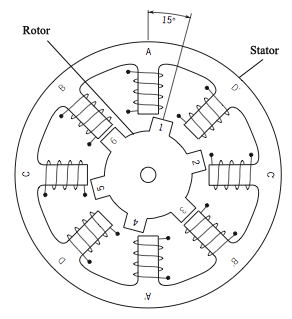
步進電機是一種同步電機,其結構同其它電機一樣,由定子(定子鐵心+繞組)和轉子組成;定子為激磁場,其激磁磁場為脈沖式;轉子通常為永磁體。
當電流流過定子繞組時,定子繞組產生一矢量磁場。由于同極互斥,該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度,轉子也隨著該磁場轉一個角度。
步進電機的分類
按照轉子分類
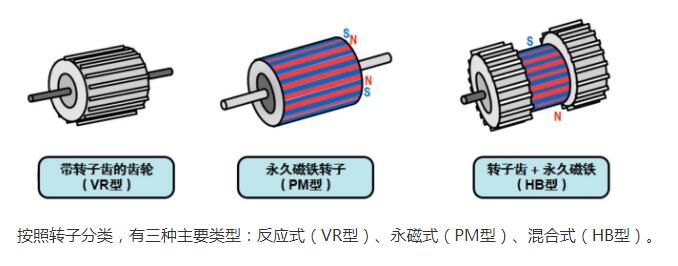
(1) 反應式步進電機(VR):定子上有繞組,繞組由軟磁材料組成。其結構簡單、成本低、步距角小,可達1.2度,但動態性能差,效率低、發熱大,可靠性難以保證。
(2) 永磁式步進電機(PM):永磁式步進電機的轉子用永磁材料制成,轉子的極數與定子的極數相同。其特點是動態性能好、輸出力矩大,但這種電機度差,步距角大(一般為7.5度或15度)。
(3) 混合式步進電機(HB)。混合式步進電機綜合了反應式、永磁式步進電動機兩者的優點,其定子上有很多相繞組,轉子上采用永磁材料,轉子和定子均有多個小齒以提高步距精度。其特點是輸出力矩大、動態性能好、步距角小,但結構復雜、成本相對較高。
按照定子上繞組分類:
共有二相、三相和五相等系列。目前受歡迎的是兩相混合式步進電機,約占97%以上的市場份額,其原因是性價比高,配上細分驅動器后效果良好。
步進電機的性能
a. 控制精度: 步進電機的相數和拍數越多,它的精確度就越高(步距角越小,精度越高)。
b. 低頻特性: 步進電機在低速時易出現低頻振動現象,當它工作在低速時一般采用阻尼技術或細分技術來克服低頻振動現象。
c. 矩頻特性: 步進電機輸出力矩隨轉速的升高而下降,高速時會急劇下降。
d. 過載能力: 步進電機不具備過載能力。
e. 運行性能: 步進電機的控制為開環控制,啟動頻率過高或負載過大易丟步或堵轉的現象,停止時轉速過高易出現過沖現象。
f. 速度響應性能: 步進電機從靜止加速到工作轉速需要上百毫秒。
步進電機的基本參數
a.步距角:
表示控制系統每發一個步進脈沖信號,電機所轉動的角度。
θ s = 180 ° / P N r
其中,θs為步進電機步距角;P為定子相數;Nr為轉子極對數(即轉子極數除以2)。
注:在反應式步進電機中,步距角不能用上式計算,而是上式的兩倍。即分辨率與永磁式及混合式相比,雖然轉子齒數相同,但反應式只有一半。
注:在混合式步進電機中,Nr為轉子齒數。
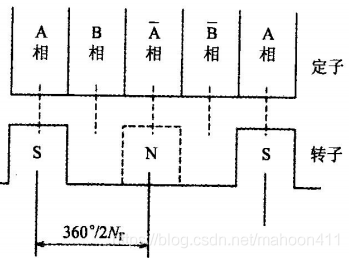
上述公式的物理意義為:轉子旋轉一周的機械角度為360°,如用極數2Nr去除,相當于一個極所占的機械角度為180°/Nr。也就是說,一個極的機械角度用定子相數去分割,就得到了步距角.
又由上式可知,要提高步進電機的分辨率,就要增加轉子極對數Nr或增加定子相數P。而增加Nr收到機械加工的限制,所以要制造高分辨率的步進電機需要兩種方法并用。
b. 相數:
指定子相數,即可獨立通電的定子電磁圈數,x相即有x個繞組。電機相數不同,其步距角也不同,一般二相電機的步距角為0.9°/1.8°、三相的為0.75°/1.5°、五相的為0.36°/0.72°。在沒有細分驅動器時,用戶主要靠選擇不同相數的步進電機來滿足自己步距角的要求。如果使用細分驅動器,則‘相數’將變得沒有意義,用戶只需在驅動器上改變細分數,就可以改變步距角。
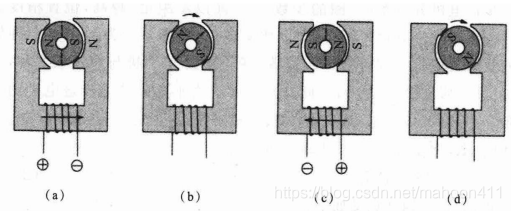
單相步進電機
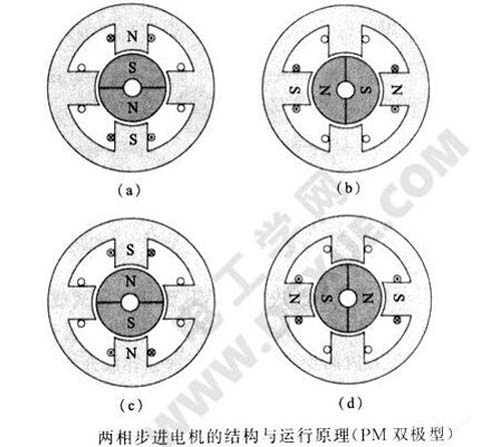
兩相步進電機
c.拍數:
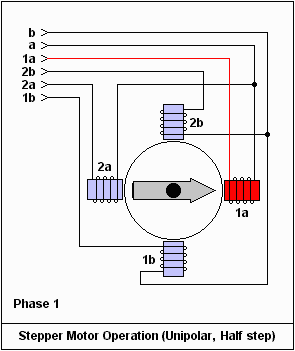
完成一個磁場周期性變化所需脈沖數或導電狀態,用n表示,或指電機轉過一個齒距角所需脈沖數,以四相電機為例,有四相四拍運行方式即AB-BC-CD-DA-AB,四相八拍運行方式即 A-AB-B-BC-C-CD-D-DA-A。
四拍驅動:這是最簡單的步進電機驅動方式。這種方式,電機在每個瞬間只有一個線圈導通。

按順序給相應引腳拉高(1)拉低(0)。 一個拉高,其他三個拉低。
八拍驅動:就是在上述四拍切換過程中穿插兩個線圈同時拉高的情況。

d.保持轉矩(最大靜力矩):
是指步進電機通電但沒有轉動時,定子鎖住轉子的力矩。通常步進電機在低速時的力矩接近保持轉矩。保持轉矩是衡量步進電機最重要的參數之一。
e.DETENT TORQUE:指步進電機沒有通電的情況下,定子鎖住轉子的力矩。由于反應式步進電機的轉子不是永磁材料,所以它沒有DETENT TORQUE(定位力矩)。
f.額定電流:
指電機可以長期連續工作的電流。比如說某個電機的額定電流為4A,你如果在驅動器上面選的是2.25A,那么電機的力氣不能達到它本來的力矩,但你設成5A,力氣雖然大了,但相對的電機發熱也變大了,電流這個設置需要根據實際情況來設置。一般小負載低轉速設小電流,而高負載改轉速則需大電流。沒有什么數學公式,都是根據實際情況來設定的。
g.額定電壓:
指電機可以長期連續工作的電壓。
h.空載啟動頻率:
電機在某種驅動形式、電壓及額定電流下,在不加負載的情況下,能夠直接起動的最大頻率。如果脈沖頻率高于該值,電機不能正常啟動,可能發生失步或堵轉。
i.空載運行頻率:
電機在某種驅動形式,電壓及額定電流下,電機不帶負載的最高轉速頻率。
j.矩頻特性:
電機在某種測試條件下測得運行中輸出力矩與頻率關系的曲線稱為運行矩頻特性,這是電機諸多動態曲線中最重要的,也是電機選擇的根本依據。其它特性還有慣頻特性、起動頻率特性等。
電機一旦選定,電機的靜力矩確定,而動態力矩卻不然。電機的動態力矩取決于電機運行時的平均電流(而非靜態電流),平均電流越大,電機輸出力矩越大,即電機的頻率特性越硬。要使平均電流大,盡可能提高驅動電壓,采用小電感大電流的電機。步進電機的動態轉矩與驅動器的形式有很大的關系,因而選用時必須了解給出的性能指標是在何種型式的電源及驅動下測定的。
步進電機細分驅動控制
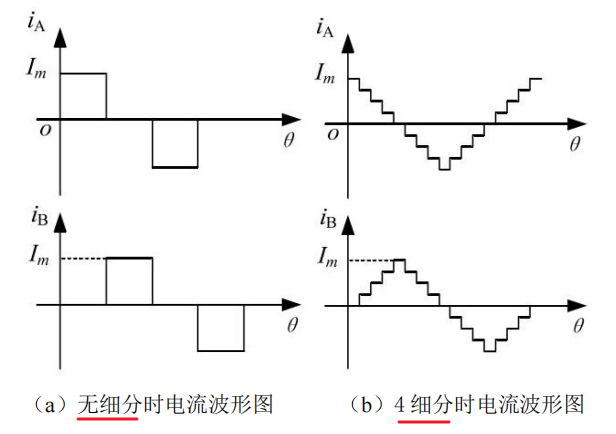
細分驅動技術通過控制各相繞組中的電流,使它們按一定的規律上升或下降,即在零電流到最大電流之間形成多個穩定的中間電流狀態,相應的合成磁場矢量的方向也將存在多個穩定的中間狀態,且按細分步距旋轉。
隨著細分數的增加,繞組電流的波形由原來的方波變為更平滑的擬正弦波,減小電機每一步運行的距離。
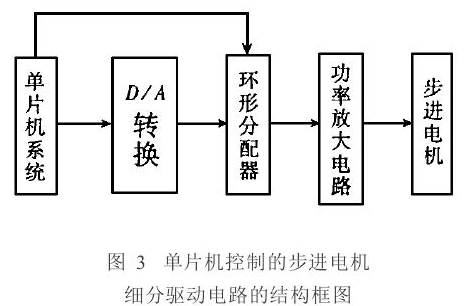
步進電機細分驅動電路大多數都采用單片微機控制,它們的構成框圖如圖2所示。單片機根據要求的步距角計算出各項繞組中通過的電流值,并輸出到數模轉換器(D/A)中,由D/A把數字量轉換為相應的模擬電壓,經過環形分配器加到各相的功放電路上,控制功放電路給各相繞組通以相應的電流,來實現步進電機的細分。
步進電機細分驅動電路大多數都采用單片微機控制,它們的構成框圖如圖2所示。單片機根據要求的步距角計算出各項繞組中通過的電流值,并輸出到數模轉換器(D/A)中,由D/A把數字量轉換為相應的模擬電壓,經過環形分配器加到各相的功放電路上,控制功放電路給各相繞組通以相應的電流,來實現步進電機的細分。
細分的優點:
1)細分提高了定位精度,使步距角減小,從而使步進電機每一步的運行更加平穩。
2)細分還能能夠大大提高電機的運轉性能,減小或者消除了低頻振動和噪聲。以二相混合式步進電機為例,如果電機額定電流是5A,采用常規驅動方式時,電機每運行一次,其繞組相電流將從0突變至5A或從5A變為0,這種電流的突然變化,勢必會引起電機運行的振動。若采用細分技術,如果是50細分的話,電機運行一步,其繞組相電流變化只要0.1A,這樣可以大大改善電機的振動情況。
3)同時細分后,電機的輸出力矩實際上是增加的,特別是對于三相式反應時電機,其力矩比不細分時提高約30-40%。
8、步進電機控制系統
步進電機控制系統通常由步進電機控制器、步進電機驅動器、步進電機三部分組成。
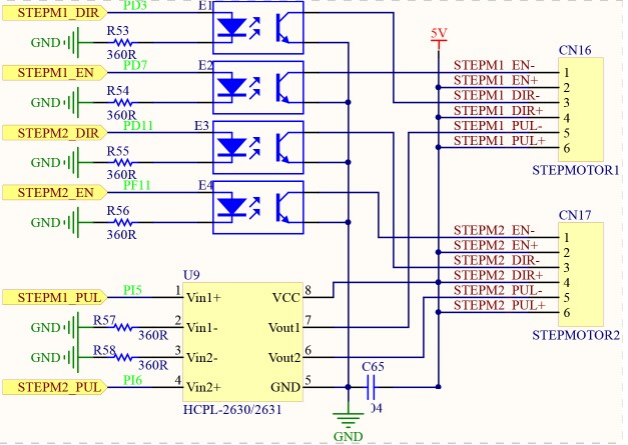
由于步進電機具有電磁特性,容易給單片機的控制電路帶來干擾,影響控制系統的穩定性。因此系統選用光耦隔離電路使控制器的輸出端與驅動器的輸入端實現電氣隔離。
控制器輸出的控制信號包括,步進脈沖信號 PUL、方向信號 DIR、使能信號 EN。控制信號經過光耦隔離作為 TB6600 驅動器的輸入。
其中脈沖信號需要選用高速光耦 HCPL-2630/2631 做隔離,對于 DIR 和 EN 這樣一般性的電平信號,選用低速光耦 PC817 做隔離。
主流型號步進電機介紹
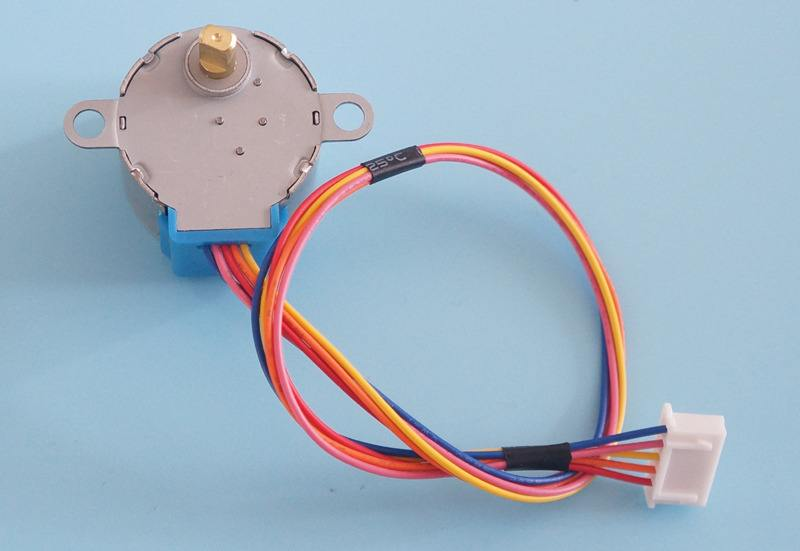
步進電機28BYJ-48名稱含義:
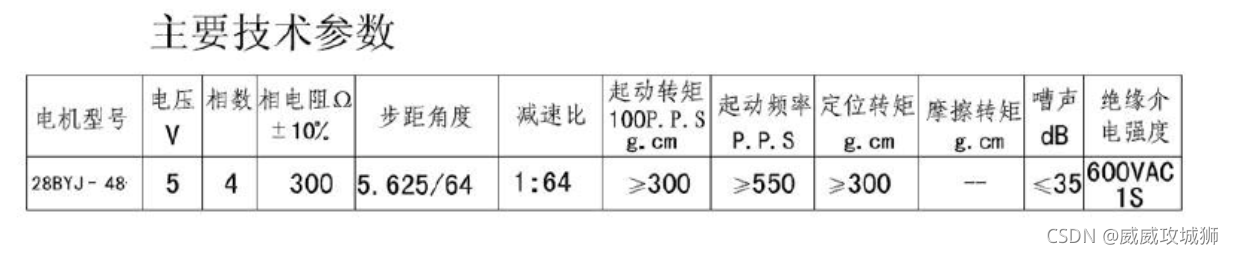
28:表示步進電機的有效最大外徑為28毫米
B: 表示步進電機“步”字漢語拼音首字母
Y: 表示永磁式“永”字漢語拼音首字母
J: 表示減速型“減”字漢語拼音首字母
BYJ: 組合即為永磁式減速步進電機
48:表示四相八拍
5V:表示額定電壓為5V,且為直流電壓
步進角:5.625度,就是1個脈沖信號轉5.625度,64個信號轉360度。
減速比:1/64,電機殼里邊的電機轉64圈,電機殼外邊的部分轉1圈。
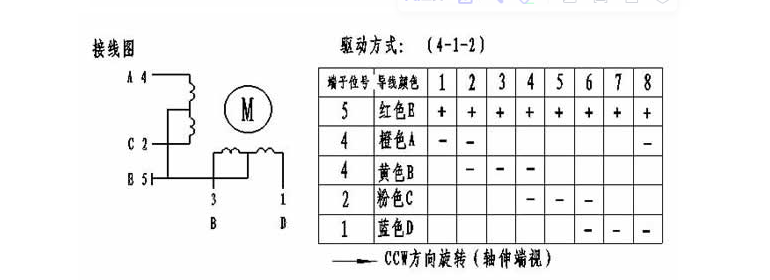
四相:ABCD四相(電機定子上有8個齒,相對的2個齒是1相),
八拍:(A-AB-B-BC-C-CD-D-DA-A)。
一拍就是一個脈沖信號,完成一個循環用8個脈沖信號。
當通電狀態的改變完成一個循環時,轉子轉過一個齒距。轉8個齒距就是一圈,8×8=64
64拍,64個脈沖信號轉一圈360度。
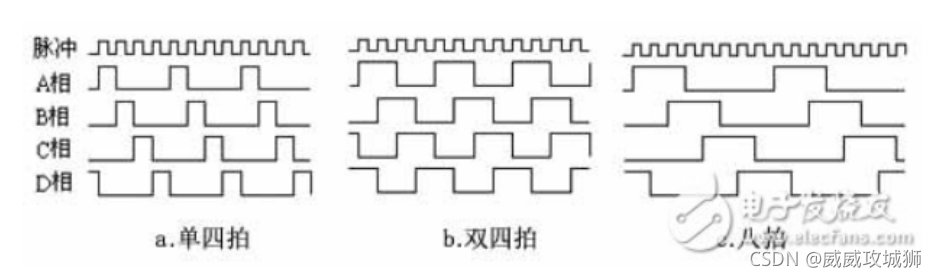
我們使用的28BYJ-48是一種4 相 5 線的步進電機,是減速步進電機 ,減速比為 1:64,步進角為 5.625/64 度。如果需要轉動1圈,那么需要360/5.625*64=4096 個脈沖信號。四相步進電機按照通電順序的不同,可分為單四拍(單拍)、雙四拍(雙拍)、八拍三種工作方式。單四拍與雙四拍的步距角相等,但單四拍的轉動力矩小。八拍工作方式的步距角是單四拍與雙四拍的一半,因此,八拍工作方式既可以保持較高的轉動力矩又可以提高控制精度。
驅動步進電機的方法
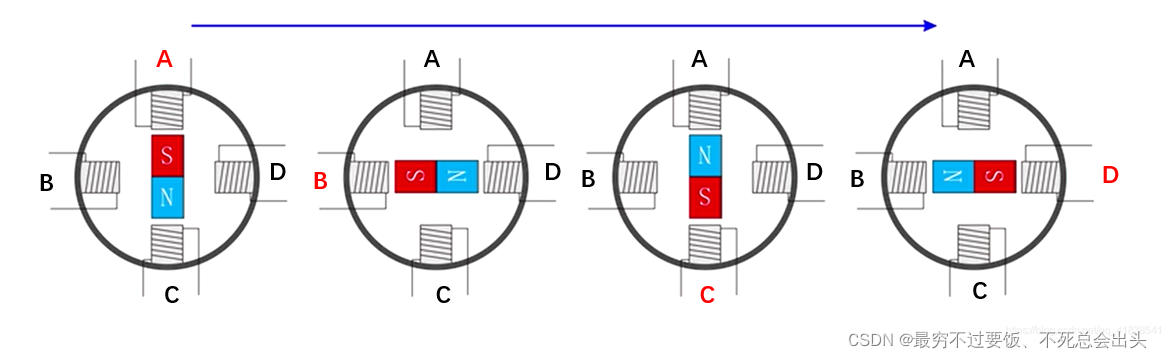
①1相勵磁法:
每一瞬間只有一個線圈相通,其它休息。
優點:簡單,耗電低,精確性良好。
缺點:力矩小,振動大,每次勵磁信號走的角度都是標稱角度。
1相勵磁法 A->B->C->D
②2相勵磁法:
每一瞬間有兩個線圈導通。
優點:力矩大,震動小。
缺點:每勵磁信號走的角度都是標稱角度。
2相勵磁法 AB->BC->CD->DA
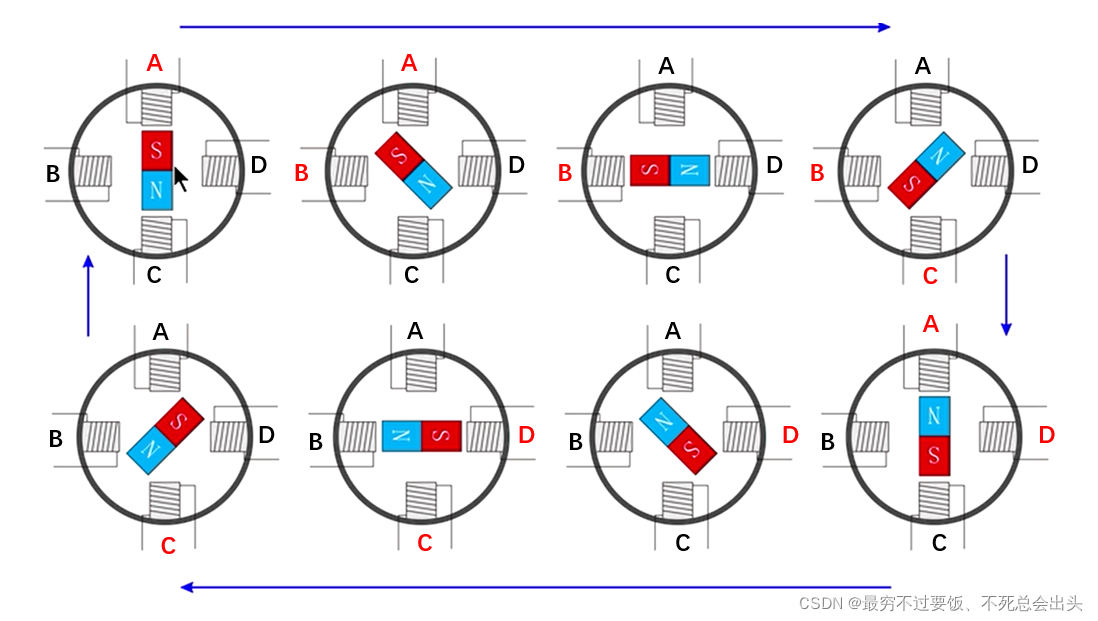
③1-2相勵磁法:
1相和2相交替導通。
優點)精度較高,運轉平滑,每送一個勵磁信號轉動1/2標稱角度,稱為半步驅動。(前兩種稱為4相4拍,這一種稱為4相8拍)
1-2相勵磁法 A-->AB-->B->BC->C-->CD->D-->DA
正轉和反轉代碼(1-2相勵磁法)
逆時針:
u8 phasecw[8] =
{0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09};
//1000,1100,0100,0110,0010,0011,0001,1001
順時針:
u8 phaseccw[8]=
{0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};
// 順時針
//1001,0001,0011,0010,0110,0100,1100,1000
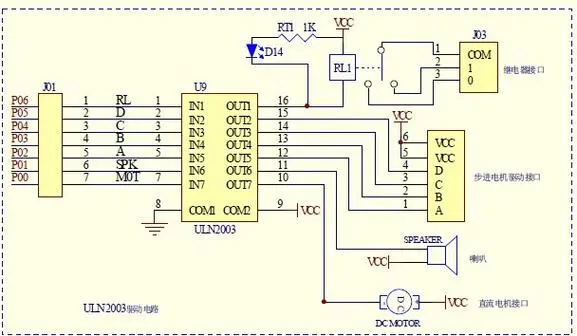
上圖是ULN2003步進電機驅動模塊,可以看到上面的標號分別是A,B,C,D,因此代碼我們可以按這個順序來理解。比如:AB是1100,BC是0110,CD是0011等
因為stm32的電流還達不到步進電機所需的最小電流,而ULN2003可以增大stm32的電流,提高驅動能力。
ULN2003是高耐壓、大電流復合晶體管陣列,由七個硅NPN 復合晶體管組成,每一對達林頓都串聯一個2.7K 的基極電阻,在5V 的工作電壓下它能與TTL 和CMOS 電路直接相連,可以直接處理原先需要標準邏輯緩沖器來處理的數據。
步進電機采用五線四相直流電速電機其中:電壓為5V,步進角度為5.625°,減速比為1/64,所以步距角為5.625/64=0.087°。意思就是,電機內部的轉自轉過5.626°,但是由于減速64倍所以外部的軸只轉動0.087°。所需脈沖是360/0.087=4096個,由于采用四相八拍驅動,因此八個脈沖為一個周期,所以外部轉動一周需要4096/8=512個周期。
步進電機的廠商
以下是對步進電機十大名牌的介紹:
日本信濃:年銷量超過 2400 萬臺,是 HB 步進電機的領先品牌。
日本美蓓亞三美:擁有超過 70 年的機電產品制造經驗。
中國鳴志電器:作為國產 HB 步進電機的龍頭企業,排名第三。
日本尼得科:成立于 1973 年,市值達到 4400 億元。
日本山洋電氣工業設備:電機巨頭,排名第五。
日本東方馬達:成立于 1885 年,是工業機器人和汽車電機的巨頭。
日本多摩川:主要針對機器人行業應用。
美國阿美特克:因其步進電機精度高、推力大、所需空間小,廣泛應用于醫療和實驗室自動化。
瑞士 Sonceboz:汽車儀表步進電機供應商。
德國西門子:工業自動化電機的巨頭,排名第十。
以上品牌在全球步進電機市場中占據領先地位,它們的產品廣泛應用于數控機床、印刷設備、醫療器械、機器人等領域,以其高性能、高效率和穩定性而著稱。
供應商A:步進電機-深圳市誠信電機有限公司
http://www.szcxmotor.com/
1、產品能力
(1)選型手冊
http://www.szcxmotor.com/11/
(2)主推型號1:
對應的產品詳情介紹
產品名稱:24BYJ48
產品型號:24BYJ48
產品類別:BYJ永磁式步進電機
子型號詳細參數:
表格 還在加載中,請等待加載完成后再嘗試復制
硬件參考設計
2、支撐
(1)技術產品
http://www.szcxmotor.com/352/65.html
本文章源自奇跡物聯開源的物聯網應用知識庫Cellular IoT Wiki,更多技術干貨歡迎關注收藏Wiki:Cellular IoT Wiki 知識庫(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
歡迎同學們走進AmazIOT知識庫的世界!
這里是為物聯網人構建的技術應用百科,以便幫助你更快更簡單的開發物聯網產品。
Cellular IoT Wiki初心:
在我們長期投身于蜂窩物聯網 ODM/OEM 解決方案的實踐過程中,一直被物聯網技術碎片化與產業資源碎片化的問題所困擾。從產品定義、芯片選型,到軟硬件研發和測試,物聯網技術的碎片化以及產業資源的碎片化,始終對團隊的產品開發交付質量和效率形成制約。為了減少因物聯網碎片化而帶來的重復開發工作,我們著手對物聯網開發中高頻應用的技術知識進行沉淀管理,并基于 Bloom OS 搭建了不同平臺的 RTOS 應用生態。后來我們發現,很多物聯網產品開發團隊都面臨著相似的困擾,于是,我們決定向全體物聯網行業開發者開放奇跡物聯內部沉淀的應用技術知識庫 Wiki,期望能為更多物聯網產品開發者減輕一些重復造輪子的負擔。
Cellular IoT Wiki沉淀的技術內容方向如下:
奇跡物聯的業務服務范圍:基于自研的NB-IoT、Cat1、Cat4等物聯網模組,為客戶物聯網ODM/OEM解決方案服務。我們的研發技術中心在石家莊,PCBA生產基地分布在深圳、石家莊、北京三個工廠,滿足不同區域&不同量產規模&不同產品開發階段的生產制造任務。跟傳統PCBA工廠最大的區別是我們只服務物聯網行業客戶。
連接我們,和10000+物聯網開發者一起降低技術和成本門檻
讓蜂窩物聯網應用更簡單~~
哈哈你終于滑到最重要的模塊了,
千萬不!要!劃!走!忍住沖動!~
歡迎加入飛書“開源技術交流群”,隨時找到我們哦~
點擊鏈接如何加入奇跡物聯技術話題群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以獲取加入技術話題群攻略
Hey 物聯網從業者,
你是否有了解過奇跡物聯的官方公眾號“eSIM物聯工場”呢?
這里是奇跡物聯的物聯網應用技術開源wiki主陣地,歡迎關注公眾號,不迷路~
及時獲得最新物聯網應用技術沉淀發布
(如有侵權,聯系刪除)
審核編輯 黃宇
-
物聯網
+關注
關注
2903文章
44275瀏覽量
371268 -
步進電機
+關注
關注
150文章
3095瀏覽量
147347
發布評論請先 登錄
相關推薦
行星減速步進電機與步進電機的區別

步進電機如何自適應控制?步進電機如何細分驅動控制?
什么是步進電機?步進電機的類型和結構
如何調整二相步進電機的步進角度,控制步進角度的功能?
二相步進電機步進角度調節,在各種精密控制系統的關鍵應用

步進電機常見問題及維護






 工商網監
工商網監
評論