 經典的無刷直流電機控制系統方案
經典的無刷直流電機控制系統方案
在Matlab/Simulink下,結合Simulink基礎模塊與S-Function,提出了無刷直流電機控制系統的設計方案。該系統采用雙閉環控制:速度環采用PI控制,電流環由電流滯環比較器構成。仿真結果表明,該方案所設計的無刷直流電機控制系統具有快速、實用的優點。
1.引言
無刷直流電機(Brushless DC Motor,以下簡稱BLDCM)是隨著電力電子技術及新型永磁材料的發展而迅速成熟起來的一種新型電機。以其啟動轉矩大、調速性能好、效率高、過載能力強、性能穩定、控制結構簡單等優點,同時還保留了普通直流電機優良的機械特性,廣泛應用于伺服控制、數控機床、機器人等領域。
隨著BLDCM應用領域的不斷擴大,對控制系統設計提出了更高的要求。為此,建立BLDCM控制系統的可視化仿真模型,可以有效的減少控制系統的設計時間,同時充分利用Simulink仿真的優越性,加入不同的擾動以及變化的參數,以便考察系統在不同控制條件下的動、靜態特性。在分析了BLDCM數學模型的基礎上,借助MATLAB的Simulink工具,建立了BLDCM控制系統的仿真模型,并利用該模型,進行了控制系統的仿真試驗,結果表明,通過該仿真模型驗證了數學模型的有效性及控制系統的合理性。
2.無數直流電機的總體設計
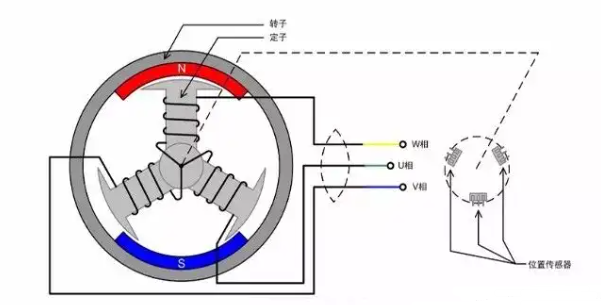
BLDCM由定子三相繞組、永磁轉子、逆變器、轉子磁極位置檢測器等組成,其轉子采用瓦形磁鋼,進行特殊的磁路設計,可獲得梯形波的氣隙磁場,定子繞組采用集中整距繞組,由逆變器提供給方波電流。BLDCM梯形波反電動勢和方波電流之間的關系,如圖1所示。
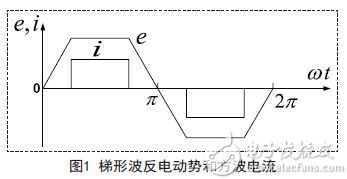
BLDCM的反電動勢波形是梯形波,并且定子和轉子間的互感是非正弦的,在此,采用感應電動機d-q變換理論的方法進行分析效果不理想,而直接利用電動機原有的相變量法,根據轉子位置,采用分段線性表示感應電動勢。
本文以兩相導通星形三相六狀態方式下,分析BLDCM的數學模型及電磁轉矩等特性。為了方便分析,作如下假設:
(1)三相繞組完全對稱,氣隙磁場分布為梯形波,平頂寬為120°電角度;
(2)忽略齒槽、換相過程和電樞反應的影響;
(3)磁路不飽和,不計渦流和磁滯損耗;
(4)電樞繞組在定子內表面均勻連續分布。
則根據BLDCM的特性,可建立其電壓平衡方程、電磁轉矩方程以及轉子運動方程。
2.1 電壓平衡方程
BLDCM三相定子電壓的平衡方程可用以下方程表示:
其中,u a、u b、u c為定子相繞組電壓;ia、ib、ic為定子相繞組電流;ea、eb、ec為定子相繞組反電勢;L為每相繞組的自感;r為每相繞組的內阻;M為每兩相繞組的互感。
由于轉子磁阻不隨轉子的位置變化,因而定子繞組的自感和互感為常數。當采用Y形聯結時,ia+ib+ic=0,因而有:
3.無刷直流電機模型設計
在Matlab R2012的Simulink環境下,利用SimPowerSystem Toolbox 5.6豐富的模塊庫,在分析BLDCM數學模型的基礎上,建立BLDCM控制系統仿真模型,系統設計框圖如圖2所示。
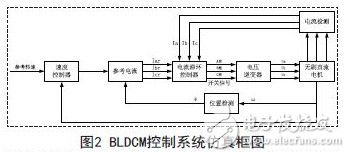
如圖2所示,BLDCM控制系統采用雙閉環控制:速度環采用PI控制,電流環采用電流滯環比較器。將圖2所示控制系統分割成各個獨立的子模塊,其中主要包括:
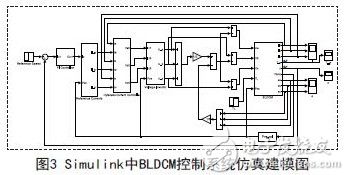
BLDCM本體模塊、參考電流模塊、電流滯環控制模塊、電壓逆變模塊、速度控制模塊、轉矩計算模塊。將各個模塊進行有機的整合,即可建立BLDCM控制系統的仿真模型,如圖3所示。
3.1 BLDCM本體模塊
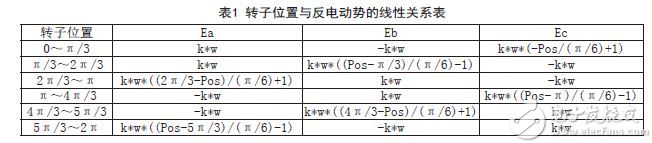
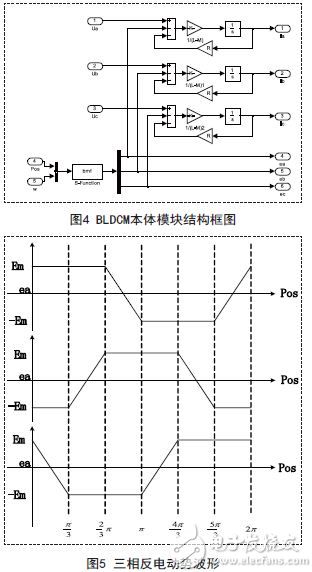
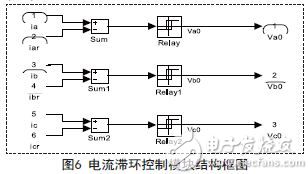
在整個控制系統中,BLDCM本體模塊是最重要的部分,該模塊根據BLDCM電壓平衡方程式(2)求取BLDCM三相相電流,控制框圖如圖4所示,由電壓平衡方程式(2)可得,要獲得三相相電流ia、ib、ic,必需首先求得三相反電動勢ea、eb、ec.在BLDCM建模過程中,獲得理想的梯形波反電動勢波形是一個關鍵的問題。目前求取反電動勢常用的方法有:(1)有限元法;(2)傅里葉變換法;(3)分段線性法,如圖5所示,將一個運行周期分為6個階段,每60°為一個換相階段,每一相的每個運行階段都可用一段直線來表示,根據某一時刻轉子位置和轉速信號,確定該時刻各相所處的運行狀態,通過直線方程即可求得反電動勢波形。分段線性法簡單易行,且精度較高,能夠較好的滿足仿真建模的設計要求。因此采用分段線性法建立梯形波反電動勢波形。
根據圖5可以推得轉子位置和反電動勢之間的線性關系,如表1所示,從而采用分段線性法,解決了在BLDCM本體模塊中梯形波反電動勢的求取問題。
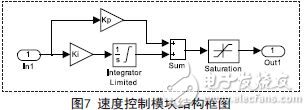
3.2 電流滯環控制模塊
電流滯環控制模塊的作用是實現滯環電流控制,輸入三相參考電流以及三相實際電流,輸出為逆變器控制信號,模塊結構框圖如圖6所示。將實際電流和參考電流之間的偏差與滯環比較器的環寬進行比較,對應相導通或關斷。選擇適當的滯環比較器環寬,即可使實際電流波形不斷跟蹤參考電流的波形,實現電流閉環控制。
k為系數,Pos為位置信號,w為轉速信號。
3.3 速度控制模塊
速度控制模塊為單輸入:參考轉速與實際轉速的差;單輸出:三相參考電流的幅值Is.其中,KP為比例參數,KI為積分參數,Saturation飽和限幅模塊將輸出的三項參考電流的幅值限定在要求范圍內,如圖7所示。
3.4 參考電流模塊
參考電流模塊的作用是根據電流幅值信號Is和位置信號給出三相參考電流,輸出的三相參考電流直接輸入電流滯環控制模塊,用于與實際電流進行電流滯環控制。參考電流模塊采用S-Function編程實現。
3.5 電壓逆變模塊
電壓逆變模塊實現的是逆變器的功能,輸入為位置信號和電流滯環控制模塊給出逆變控制信號,輸出為三相端電壓。
該模塊可根據位置信號判斷電機所處的運行階段,給出相應的三相端電壓信號,該模塊采用S-Function編程實現。
4.仿真結果
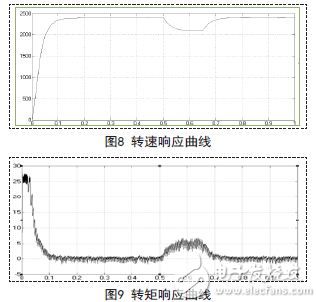
本文基于M a t l a b / S i m u l i n k建立了BLDCM控制系統的仿真模型,并對該模型進行了BLDCM雙閉環控制系統的仿真,仿真中BLDCM參數設置為:定子相繞組電阻R=1Ω,定子相繞組自感L=0.02H,互感M=-0.0061H,轉動慣量J=0.005kg.m2,額定轉速n=2400r/min,極對數p=1,額定電壓220V.為了驗證所設計的BLDCM控制系統仿真模型的靜、動態性能,系統空載起動,進入穩態后,在t=0.5s時突加負載TL=5Nm,在t=0.65s時撤去負載,可得到系統轉速、轉矩、三相相電流和三相反電動勢仿真曲線如圖8-11所示。
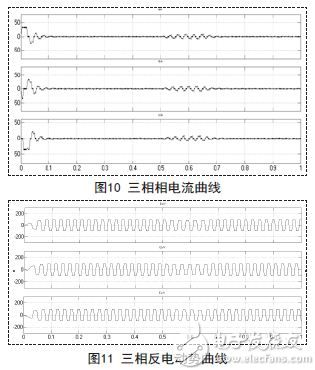
由仿真波形可以看出,在n=2400r/m i n的參考轉速下,系統響應快速且平穩,相電流和反電動勢波形較理想。圖9、1 0表明:起動階段系統保持轉矩恒定,沒有造成較大的轉矩和相電流沖擊,說明參考電流的限幅作用有效;空載穩速運行時,忽略系統的摩擦轉矩,此時的電磁轉矩均值為零;在t=0.5s時突加負載,轉速發生突降,但又能迅速恢復到平衡狀態,穩態運行時無靜差。仿真結果表明了本文提出的這種無刷直流電機控制系統的設計方案具備有效性及控制系統的合理性。
5.結論
本文在分析BLDCM數學模型的基礎上,在Matlab/Simulink仿真環境下,結合獨立的功能模塊與S-Function模塊,提出了無刷直流電機控制系統的設計方案。仿真結果表明:波形符合理論分析,系統具有較好的動、靜態特性,能夠平穩運行,實用性強。
推薦課程:
張飛軟硬開源,基于STM32BLDC直流無刷電機驅動器視頻套件
http://t.elecfans.com/topic/42.html?elecfans_trackid=fsy_post
-
無刷直流電機
+關注
關注
60文章
686瀏覽量
46016
發布評論請先 登錄
相關推薦
無刷直流電機是什么?它有什么特點?
有刷直流電機是什么?有刷直流電機的工作原理是什么?
探索吸塵器無刷直流電機驅動板的精妙控制方案
探索無刷直流電機驅動方案的技術應用

BLDC電機與有刷直流電機的區別
無刷直流電機矢量控制技術詳解
永磁無刷直流電機的控制方法
用STM32控制步進電機與無刷直流電機的區別是什么?
無刷直流電機驅動單元






 工商網監
工商網監
評論