") 一種半動(dòng)態(tài)環(huán)境中的定位方法
一種半動(dòng)態(tài)環(huán)境中的定位方法
在非靜態(tài)環(huán)境中進(jìn)行地圖繪制和定位是機(jī)器人學(xué)的基本問題。之前的方法大多關(guān)注靜態(tài)和高度動(dòng)態(tài)的物體,但在半動(dòng)態(tài)環(huán)境中,如果不考慮低動(dòng)態(tài)物體(如停放的汽車和行人),可能會(huì)導(dǎo)致定位失敗。我們提出了語(yǔ)義建圖和終身定位方法,以識(shí)別非靜態(tài)環(huán)境中的半動(dòng)態(tài)物體,并提出了一個(gè)通用框架,將主流物體檢測(cè)算法與建圖和定位算法集成在一起。建圖方法結(jié)合物體檢測(cè)算法和SLAM算法來(lái)檢測(cè)半動(dòng)態(tài)物體,并構(gòu)建只包含這些對(duì)象的語(yǔ)義地圖。在導(dǎo)航期間,定位方法可以對(duì)靜態(tài)和非靜態(tài)對(duì)象進(jìn)行分類觀測(cè),并評(píng)估半動(dòng)態(tài)對(duì)象是否移動(dòng),以減少無(wú)效觀測(cè)權(quán)重和位置波動(dòng)。實(shí)驗(yàn)證明所提出的方法可以提高移動(dòng)機(jī)器人在非靜態(tài)環(huán)境下的定位精度。
01 引言
在過去幾十年中,人們努力將SLAM的應(yīng)用范圍從實(shí)驗(yàn)室場(chǎng)景擴(kuò)展到戶外場(chǎng)景,但由于場(chǎng)景動(dòng)態(tài)程度的差別。戶外環(huán)境中,除了靜態(tài)物體外,還有著更多的動(dòng)態(tài)和半動(dòng)態(tài)物體,這可能會(huì)導(dǎo)致定位系統(tǒng)產(chǎn)生波動(dòng),以對(duì)地圖構(gòu)建和定位系統(tǒng)提出了重要挑戰(zhàn)。為此,研究人員開始打破靜態(tài)世界的假設(shè),但在識(shí)別高度動(dòng)態(tài)和半動(dòng)態(tài)物體方面仍然存在挑戰(zhàn)。通過對(duì)動(dòng)態(tài)物體進(jìn)行建模和過濾,在高度動(dòng)態(tài)的環(huán)境中實(shí)現(xiàn)了精確的地圖和定位結(jié)果。然而,在包含許多半動(dòng)態(tài)物體的環(huán)境中,地圖和定位問題仍未解決,因?yàn)殪o態(tài)與半動(dòng)態(tài)物體具有相似的特性。
為了解決這個(gè)問題,通過選擇那些隨時(shí)間變化較小的特征,并利用語(yǔ)義信息進(jìn)行定位的方法證明是有效的,且已經(jīng)得到廣泛應(yīng)用。因此,本文提出了一種相關(guān)方法,用于識(shí)別和記錄環(huán)境中的靜態(tài)和半動(dòng)態(tài)物體,可以分為兩部分:分別構(gòu)建靜態(tài)地圖和半動(dòng)態(tài)地圖,并基于兩者進(jìn)行機(jī)器人定位。
本文的建圖算法擴(kuò)展了赫斯等人[15]引入的OccupancyGrid技術(shù),用于記錄環(huán)境的半動(dòng)態(tài)部分。該算法能夠檢測(cè)環(huán)境中的靜態(tài)和半動(dòng)態(tài)物體,并生成兩張地圖:靜態(tài)地圖和半動(dòng)態(tài)地圖。在建圖過程中,通過過濾動(dòng)態(tài)物體,靜態(tài)地圖包含環(huán)境中的靜態(tài)和半動(dòng)態(tài)物體,而半動(dòng)態(tài)地圖只包含半動(dòng)態(tài)物體。本文的定位算法同時(shí)使用兩張地圖優(yōu)化粒子濾波算法。它允許對(duì)觀測(cè)進(jìn)行分類(靜態(tài)或半動(dòng)態(tài)物體),并確定半動(dòng)態(tài)物體移動(dòng)的距離。然后通過調(diào)整不同物體的權(quán)重,可以在半動(dòng)態(tài)環(huán)境中獲得更精確的定位結(jié)果。
我們的主要貢獻(xiàn)如下:
我們提出了一種能夠識(shí)別并記錄環(huán)境半動(dòng)態(tài)特征的語(yǔ)義建圖方法;
我們構(gòu)建了一個(gè)穩(wěn)健的定位系統(tǒng),可以根據(jù)觀察結(jié)果確定物體類別;
我們引入了一個(gè)通用框架,結(jié)合主流的物體檢測(cè)和SLAM算法,無(wú)論半動(dòng)態(tài)物體位置如何變化,都能達(dá)到高精度定位的目標(biāo)。
02 方法概述
本節(jié)介紹所提方法的體系結(jié)構(gòu)。根據(jù)[29]的分類,本文稍作修改如下:
靜態(tài)物體:保持固定位置的物體,如墻壁、貨架;
半動(dòng)態(tài)物體:在建圖過程中保持靜止,但在定位過程中可能移動(dòng)的物體,如椅子、停放的汽車;
動(dòng)態(tài)物體:指位置頻繁變化的物體,例如行人和移動(dòng)車輛。

圖2展示了建圖和定位框架。在建圖過程中(紅色虛線表示),選擇一個(gè)對(duì)象檢測(cè)算法(Yolov3
[37])來(lái)識(shí)別半動(dòng)態(tài)對(duì)象。在SLAM線程中,我們利用SLAM算法(Cartographer
[15])生成靜態(tài)地圖,然后將激光雷達(dá)點(diǎn)投影到圖像中。給出的半動(dòng)態(tài)位置的全球坐標(biāo)可以幫助創(chuàng)建半動(dòng)態(tài)地圖 從靜態(tài)地圖
從靜態(tài)地圖 。靜態(tài)地圖包含靜態(tài)和半動(dòng)態(tài)對(duì)象的信息,而半動(dòng)態(tài)地圖僅包含半動(dòng)態(tài)對(duì)象的信息。此外,半動(dòng)態(tài)地圖是在線生成的,不會(huì)增加建圖過程的復(fù)雜性。在定位過程中(藍(lán)色虛線表示),同時(shí)將和加載到定位系統(tǒng)中。通過比較觀察距離,我們可以獲得與靜態(tài)對(duì)象(黃色點(diǎn))和半動(dòng)態(tài)對(duì)象(紅色點(diǎn))對(duì)應(yīng)的觀察信息。同時(shí)從和中獲取信息來(lái)定位機(jī)器人的姿態(tài),取決于對(duì)象是否移動(dòng)以及移動(dòng)了多遠(yuǎn)。通過降低半動(dòng)態(tài)物體觀測(cè)值的權(quán)重,可以實(shí)現(xiàn)精確定位。
。靜態(tài)地圖包含靜態(tài)和半動(dòng)態(tài)對(duì)象的信息,而半動(dòng)態(tài)地圖僅包含半動(dòng)態(tài)對(duì)象的信息。此外,半動(dòng)態(tài)地圖是在線生成的,不會(huì)增加建圖過程的復(fù)雜性。在定位過程中(藍(lán)色虛線表示),同時(shí)將和加載到定位系統(tǒng)中。通過比較觀察距離,我們可以獲得與靜態(tài)對(duì)象(黃色點(diǎn))和半動(dòng)態(tài)對(duì)象(紅色點(diǎn))對(duì)應(yīng)的觀察信息。同時(shí)從和中獲取信息來(lái)定位機(jī)器人的姿態(tài),取決于對(duì)象是否移動(dòng)以及移動(dòng)了多遠(yuǎn)。通過降低半動(dòng)態(tài)物體觀測(cè)值的權(quán)重,可以實(shí)現(xiàn)精確定位。
A:建圖方法
1)靜態(tài)地圖更新:基于物體出現(xiàn)在相同位置的可能性來(lái)實(shí)現(xiàn)對(duì)動(dòng)態(tài)物體的識(shí)別。具體來(lái)說,如果某個(gè)區(qū)域的狀態(tài)在占用和空閑之間發(fā)生變化,則該區(qū)域被視為動(dòng)態(tài)區(qū)域。在本文中,采用概率方法將問題定義為:

2)半動(dòng)態(tài)地圖更新:觀測(cè)數(shù)據(jù) 被分為靜態(tài)對(duì)象觀測(cè)數(shù)據(jù)
被分為靜態(tài)對(duì)象觀測(cè)數(shù)據(jù) 和半動(dòng)態(tài)對(duì)象觀測(cè)數(shù)據(jù)
和半動(dòng)態(tài)對(duì)象觀測(cè)數(shù)據(jù) 。為此步驟,應(yīng)用了Yolov3來(lái)獲取分類信息。通過校準(zhǔn)激光雷達(dá)與攝像頭之間的外部參數(shù),可以將激光雷達(dá)點(diǎn)投影到這些矩形框中。然而,由于激光雷達(dá)點(diǎn)在矩形框邊緣可能對(duì)應(yīng)于其他物體,因此無(wú)法提供準(zhǔn)確的尺寸信息。為了解決這個(gè)問題,只采用矩形框中心的點(diǎn)來(lái)代表半動(dòng)態(tài)對(duì)象的位置信息,從而排除了尺寸信息。有了位置信息,就可以在靜態(tài)地圖的基礎(chǔ)上進(jìn)行連接區(qū)域的計(jì)算,從而生成更精確的半動(dòng)態(tài)地圖。
。為此步驟,應(yīng)用了Yolov3來(lái)獲取分類信息。通過校準(zhǔn)激光雷達(dá)與攝像頭之間的外部參數(shù),可以將激光雷達(dá)點(diǎn)投影到這些矩形框中。然而,由于激光雷達(dá)點(diǎn)在矩形框邊緣可能對(duì)應(yīng)于其他物體,因此無(wú)法提供準(zhǔn)確的尺寸信息。為了解決這個(gè)問題,只采用矩形框中心的點(diǎn)來(lái)代表半動(dòng)態(tài)對(duì)象的位置信息,從而排除了尺寸信息。有了位置信息,就可以在靜態(tài)地圖的基礎(chǔ)上進(jìn)行連接區(qū)域的計(jì)算,從而生成更精確的半動(dòng)態(tài)地圖。
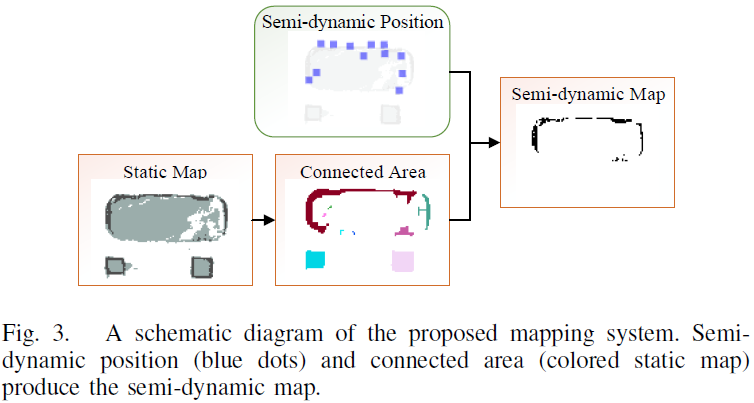
圖3中的藍(lán)色圓點(diǎn)表示半動(dòng)態(tài)位置。一個(gè)或多個(gè)相連的區(qū)域表示一個(gè)單一物體。為了補(bǔ)充半動(dòng)態(tài)物體的維度,我們使用較低的閾值來(lái)獲取二進(jìn)制靜態(tài)地圖,然后計(jì)算相連區(qū)域。將半動(dòng)態(tài)位置和相連區(qū)域結(jié)合起來(lái)生成半動(dòng)態(tài)地圖。在生成靜態(tài)地圖時(shí),僅獲取半動(dòng)態(tài)位置,圖3中的其他過程是離線的,不會(huì)增加建圖過程的計(jì)算復(fù)雜度。有關(guān)更多實(shí)驗(yàn)結(jié)果,請(qǐng)參見第四部分。
B:定位方法
對(duì)于定位過程,我們使用蒙特卡洛方法通過使用odometry 和觀察數(shù)據(jù)?進(jìn)行遞歸驗(yàn)證來(lái)提出該想法。通過同時(shí)加載和,我們可以識(shí)別并減少與移動(dòng)的半動(dòng)態(tài)物體對(duì)應(yīng)的觀測(cè)值的權(quán)重。圖4展示了所提定位方法的圖形模型,其輸入包括傳感器觀測(cè)數(shù)據(jù)、靜態(tài)地圖、半動(dòng)態(tài)地圖、odometry和時(shí)間
和觀察數(shù)據(jù)?進(jìn)行遞歸驗(yàn)證來(lái)提出該想法。通過同時(shí)加載和,我們可以識(shí)別并減少與移動(dòng)的半動(dòng)態(tài)物體對(duì)應(yīng)的觀測(cè)值的權(quán)重。圖4展示了所提定位方法的圖形模型,其輸入包括傳感器觀測(cè)數(shù)據(jù)、靜態(tài)地圖、半動(dòng)態(tài)地圖、odometry和時(shí)間 的姿態(tài)。定位問題可以表示為:
的姿態(tài)。定位問題可以表示為:

通過將貝葉斯公式應(yīng)用于方程2,可以表示為:

其中 為歸一化常數(shù)。為了進(jìn)一步減少移動(dòng)物體的權(quán)重,應(yīng)根據(jù)和計(jì)算觀測(cè)值的分類。方程3可進(jìn)一步定義為:
為歸一化常數(shù)。為了進(jìn)一步減少移動(dòng)物體的權(quán)重,應(yīng)根據(jù)和計(jì)算觀測(cè)值的分類。方程3可進(jìn)一步定義為:

我們的方法主要改進(jìn)在于同時(shí)使用兩張地圖對(duì)半動(dòng)態(tài)物體和靜態(tài)物體的觀測(cè)進(jìn)行分類。通過比較每個(gè)激光點(diǎn)與兩張地圖之間的最近距離來(lái)計(jì)算分類,設(shè) 代表點(diǎn)
代表點(diǎn) 到靜態(tài)地圖中相鄰網(wǎng)格的距離,
到靜態(tài)地圖中相鄰網(wǎng)格的距離, 代表點(diǎn)i到半動(dòng)態(tài)地圖中相鄰網(wǎng)格的距離。如果-的差小于一個(gè)閾值,則當(dāng)前激光點(diǎn)對(duì)應(yīng)于半動(dòng)態(tài)物體,否則為靜態(tài)物體。定位過程中給出的結(jié)果反映了半動(dòng)態(tài)物體(紅色激光點(diǎn))和靜態(tài)物體(黃色激光點(diǎn))。根據(jù)半動(dòng)態(tài)物體移動(dòng)的距離,相應(yīng)觀測(cè)的權(quán)重會(huì)相應(yīng)地減少。減少的比例可以定義為
代表點(diǎn)i到半動(dòng)態(tài)地圖中相鄰網(wǎng)格的距離。如果-的差小于一個(gè)閾值,則當(dāng)前激光點(diǎn)對(duì)應(yīng)于半動(dòng)態(tài)物體,否則為靜態(tài)物體。定位過程中給出的結(jié)果反映了半動(dòng)態(tài)物體(紅色激光點(diǎn))和靜態(tài)物體(黃色激光點(diǎn))。根據(jù)半動(dòng)態(tài)物體移動(dòng)的距離,相應(yīng)觀測(cè)的權(quán)重會(huì)相應(yīng)地減少。減少的比例可以定義為 ,該函數(shù)的結(jié)果在0到1之間,表示當(dāng)前觀測(cè)的權(quán)重應(yīng)減少多少。在本工作中,這些半動(dòng)態(tài)物體的位置被假設(shè)遵循高斯分布。用F表示遞減比率,其定義如下:
,該函數(shù)的結(jié)果在0到1之間,表示當(dāng)前觀測(cè)的權(quán)重應(yīng)減少多少。在本工作中,這些半動(dòng)態(tài)物體的位置被假設(shè)遵循高斯分布。用F表示遞減比率,其定義如下:

其中, 是一個(gè)相對(duì)較小的距離,在本文中取0.1。
是一個(gè)相對(duì)較小的距離,在本文中取0.1。 是判斷一個(gè)物體是否為半動(dòng)態(tài)的閾值,在本文中取0.3。因此,當(dāng)前位置的最終權(quán)重可以計(jì)算如下:
是判斷一個(gè)物體是否為半動(dòng)態(tài)的閾值,在本文中取0.3。因此,當(dāng)前位置的最終權(quán)重可以計(jì)算如下:

其中, 表示觀測(cè)模型。在本文中,選擇似然觀測(cè)模型來(lái)計(jì)算當(dāng)前位置的權(quán)重。通過同時(shí)使用靜態(tài)地圖和半動(dòng)態(tài)地圖,可以使姿態(tài)估計(jì)更加準(zhǔn)確。計(jì)算當(dāng)前姿態(tài)權(quán)重的算法總結(jié)在算法1中。
表示觀測(cè)模型。在本文中,選擇似然觀測(cè)模型來(lái)計(jì)算當(dāng)前位置的權(quán)重。通過同時(shí)使用靜態(tài)地圖和半動(dòng)態(tài)地圖,可以使姿態(tài)估計(jì)更加準(zhǔn)確。計(jì)算當(dāng)前姿態(tài)權(quán)重的算法總結(jié)在算法1中。
該框架的三個(gè)主要組件——目標(biāo)檢測(cè)、地圖構(gòu)建和定位算法——都可以被其他相應(yīng)的主流算法替換。
03實(shí)驗(yàn)
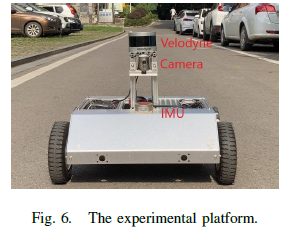
為了驗(yàn)證本文所提出的方法,我們使用一臺(tái)機(jī)器人進(jìn)行了實(shí)驗(yàn)測(cè)試。該機(jī)器人(如圖6所示)配備了一臺(tái)16束Velodyne激光雷達(dá)(在地圖構(gòu)建和定位過程中僅使用一束激光束)、攝像頭、慣性測(cè)量單元和編碼器。
該停車庫(kù)被選為實(shí)驗(yàn)場(chǎng)景,因?yàn)槊總€(gè)個(gè)體運(yùn)行時(shí)停車庫(kù)都會(huì)發(fā)生顯著變化。它由四個(gè)房間組成,地圖框架中的左側(cè)房間通常比其他房間停放更多的車輛。機(jī)器人從左側(cè)房間開始,繞著停車庫(kù)移動(dòng),然后回到原地。由于實(shí)驗(yàn)場(chǎng)景的特殊性,很難直接獲得真實(shí)姿態(tài)。我們?cè)诘貓D構(gòu)建過程中記錄了機(jī)器人的姿態(tài)作為真實(shí)姿態(tài),并在其他時(shí)間構(gòu)建的地圖上記錄了定位過程中的姿態(tài)。通過比較未使用和使用所提方法的定位精度,驗(yàn)證了所提方法的有效性。在發(fā)生改變的環(huán)境中使用所提方法的定位精度也與在未改變的環(huán)境中不使用所提方法的定位精度進(jìn)行了比較。
A. 停車場(chǎng)場(chǎng)景中的地圖
對(duì)于建圖過程,我們讓機(jī)器人每隔幾天進(jìn)行一次數(shù)據(jù)采集。在單次運(yùn)行中收集的數(shù)據(jù)用于構(gòu)建.,該文件是通過使用靜態(tài)對(duì)象的位置和速度信息在線下構(gòu)建。
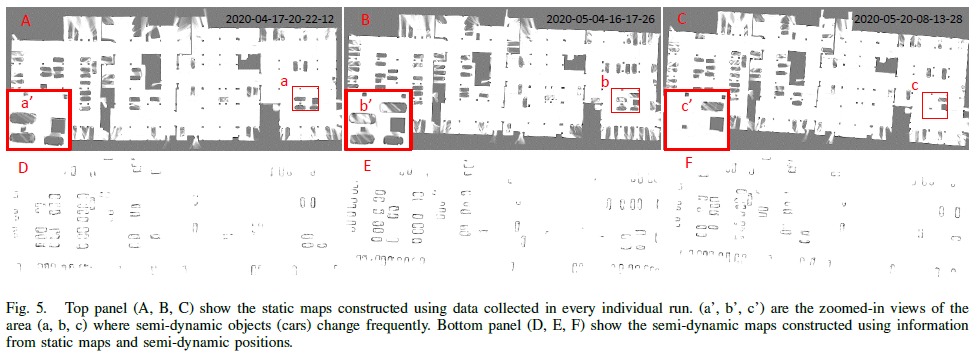
最終構(gòu)建的和如圖5所示。在這些靜態(tài)地圖中,由于車輛的移動(dòng),某些區(qū)域顯得較為明顯,而其他部分則始終保持靜態(tài)。包含環(huán)境中大部分半動(dòng)態(tài)物體,缺失的半動(dòng)態(tài)物體對(duì)應(yīng)于較少被觀察到的區(qū)域,這對(duì)定位精度影響較小。通過應(yīng)用逆觀測(cè)模型,在地圖構(gòu)建過程中可以自動(dòng)去除高度動(dòng)態(tài)的物體,如移動(dòng)的行人和車輛。
B. 在非靜態(tài)環(huán)境中的定位
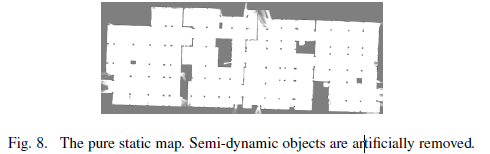
我們比較了在未修改和修改的半動(dòng)態(tài)環(huán)境中使用和不使用我們的算法的定位精度(圖7ABCD)。此外,我們還展示了在使用純靜態(tài)地圖的情況下,原始蒙特卡洛定位方法的定位精度(圖7E)。所有半動(dòng)態(tài)對(duì)象,如停放的汽車,都是人工移除的。在建圖過程中選擇的姿態(tài)作為真值,在定位過程中記錄的姿態(tài)也使用在其他日子構(gòu)建的地圖中。算法Evo([38])被用于離線評(píng)估我們的方法的精度。圖7展示了定位精度的定性結(jié)果,表I列出了姿態(tài)誤差的定量比較。MCL+-和MCL++分別表示在未修改和修改的環(huán)境中使用蒙特卡洛算法時(shí),是否使用了我們的方法(第一個(gè)加減號(hào)指示定位過程中環(huán)境是否改變,第二個(gè)加減號(hào)指示定位過程中是否使用了我們的方法)。因此,MCL--和MCL-+分別表示在未修改的環(huán)境中使用蒙特卡洛算法時(shí),是否使用了我們的方法。MCL表示使用蒙特卡洛算法,但不使用我們的方法,使用純靜態(tài)地圖。純靜態(tài)地圖如圖8所示,其中半動(dòng)態(tài)對(duì)象從地圖中人工移除。此外,圖7ABCDE分別對(duì)應(yīng)表1中的MCL+-、MCL++、MCL--、MCL-+和MCL。
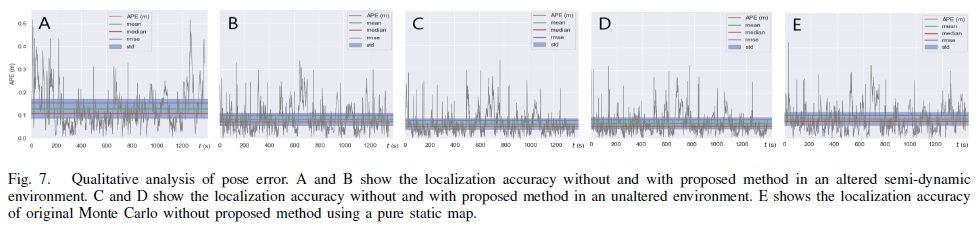
在圖7A和7B中,我們的算法在改變的環(huán)境中顯著降低了偏差,給出了更低的平均誤差(0.083米相對(duì)于0.129米)和最大誤差(0.336米相對(duì)于0.516米)。根據(jù)圖5中的地圖和機(jī)器人的路線,它在前300秒和最后200秒期間遇到更多的半動(dòng)態(tài)物體(如圖7A所示),這些地方的定位精度顯著波動(dòng),這證明原始的蒙特卡洛算法在改變的環(huán)境中性能較低。相反,應(yīng)用了我們的算法后,結(jié)果更加準(zhǔn)確(如圖7B所示)。
我們還進(jìn)行了實(shí)驗(yàn)來(lái)評(píng)估算法在靜態(tài)環(huán)境中的表現(xiàn)。如圖7C和7D所示,我們的算法也可以應(yīng)用于未改變的環(huán)境中,與傳統(tǒng)的蒙特卡洛定位方法相比,其精度相當(dāng)(0.327米對(duì)0.336米,0.065米對(duì)0.064米),這證明了所提方法在具有靜態(tài)和半動(dòng)態(tài)物體的環(huán)境中的通用性。
此外,我們還進(jìn)行了實(shí)驗(yàn),測(cè)試原始蒙特卡洛定位算法在修改后的環(huán)境中的定位性能,但將半動(dòng)態(tài)物體從地圖中人工移除。因此,地圖僅包含環(huán)境的靜態(tài)物體(如圖8所示)。機(jī)器人利用環(huán)境中的靜態(tài)物體來(lái)確定自身的位置。如圖7E所示,由于所有半動(dòng)態(tài)信息都被丟棄,因此其定位精度較低,是合理的。
此外,是在線獲取的。因此,在定位過程中,機(jī)器人只需要比較兩幅地圖之間的距離,所以計(jì)算復(fù)雜度可以忽略不計(jì)。值得注意的是,蒙特卡洛算法的絕對(duì)精度并不是本文的重點(diǎn)。我們的目標(biāo)是將該方法引入主流的地圖和定位算法,以獲得更準(zhǔn)確的結(jié)果而不犧牲效率。實(shí)驗(yàn)結(jié)果證明,我們的方法在靜態(tài)和半動(dòng)態(tài)環(huán)境中具有更好的魯棒性、更高的精度和通用性。
C.一些棘手的情況
在獲得半動(dòng)態(tài)位置的過程中,可能會(huì)出現(xiàn)一些半動(dòng)態(tài)位置擊中錯(cuò)誤位置的情況(如圖9A和B所示)。但是,錯(cuò)誤的位置不會(huì)影響生成,因?yàn)樗鼪]有對(duì)應(yīng)的連接區(qū)域。
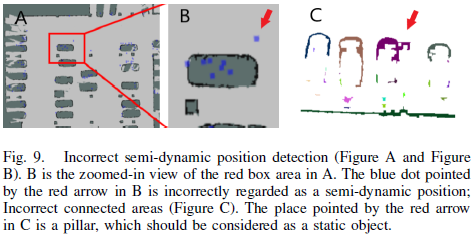
在計(jì)算連通區(qū)域的過程中,某些靜態(tài)區(qū)域可能會(huì)被誤認(rèn)為是半動(dòng)態(tài)區(qū)域。如圖9C所示,柱子被誤認(rèn)為是半動(dòng)態(tài)物體,然而,這些物體(柱子和墻)的靜態(tài)特性使得該區(qū)域的重量保持不變。因此,錯(cuò)誤的連通區(qū)域不會(huì)影響定位精度。
04 總結(jié)與未來(lái)
本文提出了一種新穎的語(yǔ)義地圖生成方法和能夠處理半動(dòng)態(tài)環(huán)境的定位方法。通過融合攝像頭和激光雷達(dá),所提出的方法可以在地圖構(gòu)建期間自主檢測(cè)和標(biāo)記半動(dòng)態(tài)物體,利用這些關(guān)鍵信息,能夠構(gòu)建用于后續(xù)導(dǎo)航的2D半動(dòng)態(tài)地圖,并設(shè)計(jì)了基于后驗(yàn)分布的姿態(tài)估計(jì)。我們還對(duì)配備了攝像頭、激光雷達(dá)和IMU的移動(dòng)平臺(tái)在地下停車場(chǎng)進(jìn)行了多項(xiàng)評(píng)估。結(jié)果表明,我們的方法在大多數(shù)情況下都能正常工作。基于此工作,我們的框架可以輕松擴(kuò)展到3D模式。
在進(jìn)一步擴(kuò)展中,我們將研究使用其他類型的地圖和不同的定位算法,例如點(diǎn)云地圖和NDT定位算法。
-
算法
+關(guān)注
關(guān)注
23文章
4601瀏覽量
92671 -
定位
+關(guān)注
關(guān)注
5文章
1304瀏覽量
35344 -
移動(dòng)機(jī)器人
+關(guān)注
關(guān)注
2文章
757瀏覽量
33546 -
SLAM
+關(guān)注
關(guān)注
23文章
419瀏覽量
31789
原文標(biāo)題:干貨丨半動(dòng)態(tài)環(huán)境中的終身定位
文章出處:【微信號(hào):gh_c87a2bc99401,微信公眾號(hào):INDEMIND】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一種簡(jiǎn)單的OpenHarmony環(huán)境搭建方法

一種修正的近場(chǎng)聲源定位時(shí)延估計(jì)方法
一種基于負(fù)載均衡的分層副本定位方法
一種同時(shí)定位與地圖構(gòu)建的仿真系統(tǒng)
一種車牌識(shí)別系統(tǒng)中的混合車牌定位方法
一種新的快速自適應(yīng)車牌定位方法
一種NLOS環(huán)境下的TOA AOA定位算法
一種動(dòng)態(tài)選擇加密方法

一種新的動(dòng)態(tài)環(huán)境衰減因子模型的算法
一種新型的動(dòng)態(tài)響應(yīng)信道建模方法
一種適用于動(dòng)態(tài)場(chǎng)景的SLAM方法

一種基于TextRank算法的幀定位方法

一種基于風(fēng)險(xiǎn)軌跡與復(fù)雜網(wǎng)絡(luò)的缺陷定位方法

一種基于DE和ELM的半監(jiān)督分類方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論