 視覺傳感器幾大技術要點:技術分類、技術實現和應用、選擇技巧
視覺傳感器幾大技術要點:技術分類、技術實現和應用、選擇技巧
視覺傳感技術是傳感技術七大類中的一個,視覺傳感器是指:通過對攝像機拍攝到的圖像進行圖像處理,來計算對象物的特征量(面積、重心、長度、位置等),并輸出數據和判斷結果的傳感器。
什么是視覺傳感器?
視覺傳感器是整個機器視覺系統信息的直接來源,主要由一個或者兩個圖形傳感器組成,有時還要配以光投射器及其他輔助設備。視覺傳感器的主要功能是獲取足夠的機器視覺系統要處理的最原始圖像。
圖像傳感器可以使用激光掃描器、線陣和面陣CCD攝像機或者TV攝像機,也可以是最新出現的數字攝像機等。
視覺傳感技術分類
1、3D視覺傳感技術
3D視覺傳感器具有廣泛的用途,比如多媒體手機、網絡攝像、數碼相機、機器人視覺導航、汽車安全系統、生物醫學像素分析、人機界面、虛擬現實、監控、工業檢測、無線遠距離傳感、顯微鏡技術、天文觀察、海洋自主導航、科學儀器等等。這些不同的應用均是基于3D視覺圖像傳感器技術。特別是3D影像技術在工業控制、汽車自主導航中具有急迫的應用。
2、智能視覺傳感技術
智能視覺傳感技術下的智能視覺傳感器也稱智能相機,是近年來機器視覺領域發展最快的一項新技術。智能相機是一個兼具圖像采集、圖像處理和信息傳遞功能的小型機器視覺系統,是一種嵌入式計算機視覺系統。它將圖像傳感器、數字處理器、通訊模塊和其他外設集成到一個單一的相機內,由于這種一體化的設計,可降低系統的復雜度,并提高可靠性。同時系統尺寸大大縮小,拓寬了視覺技術的應用領域。
智能視覺傳感器的易學、易用、易維護、安裝方便,可在短期內構建起可靠而有效的視覺檢測系統等優點使得這項技術得到飛速的發展。
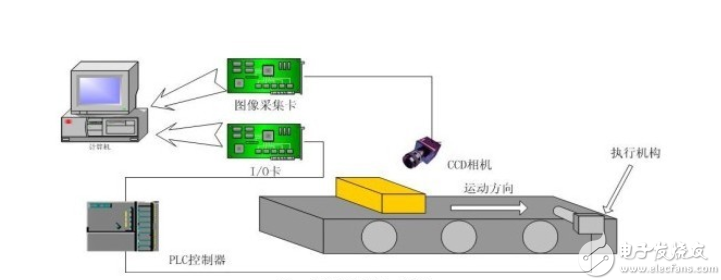
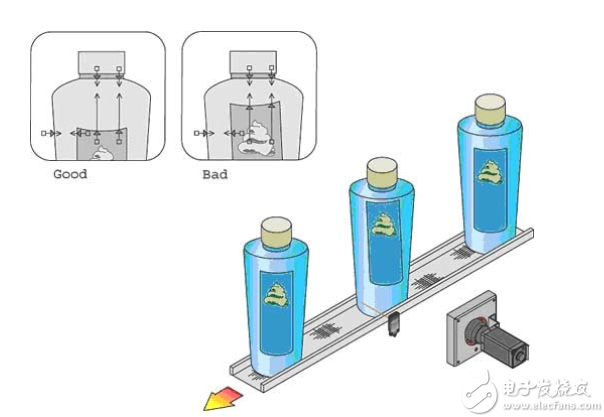
視覺檢測系統原理圖
視覺傳感技術的實現基礎
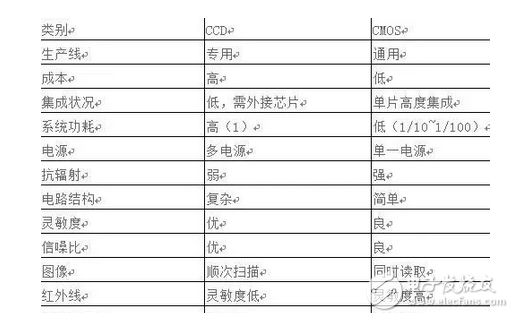
視覺傳感器的圖像采集單元主要由CCD/CMOS像機、光學系統、照明系統和圖像采集卡組成,將光學影像轉換成數字圖像,傳遞給圖像處理單元。通常使用的圖像傳感器件主要有CCD圖像傳感器和CMOS圖像傳感器兩種。下面將介紹兩種傳感器的實現原理及優缺點。
視覺傳感技術的應用
1、汽車車身視覺檢測系統
車身成型是汽車制造的關鍵工序之一,對車身的各項指標要求嚴格,需對車身進行100%的檢測。傳統的車身檢測方法是利用三坐標測量機,其操作復雜,速度慢,工期長,只能進行抽檢。
通常,車身的關鍵尺寸主要是擋風玻璃尺寸、車門安裝處棱邊位置、定位孔位置等。因此視覺傳感器分布于這些位置附近,測量其相應的棱邊、孔、表面的空間位置尺寸。在生產線上設計測量工位,車身定位后,置于一框架內,框架由縱橫分布的金屬柱、桿構成,可根據需要在框架上靈活安裝視覺傳感器。根據測量點的數量可安裝相應數量的視覺傳感器,(通常情況下每個視覺傳感器測量一個被測點),根據不同形式的傳感器包括雙目立體視覺傳感器、輪廓傳感器等多種類型。
測量系統工作過程為:由生產線運送車身到測量工位進行準確定位,然后傳感器按要求順序開始工作,計算機采集檢測點圖像并進行處理,計算出被測點的空間三維坐標,計算值與標準值比對,得出檢測結果,并將車身送出測量工位。
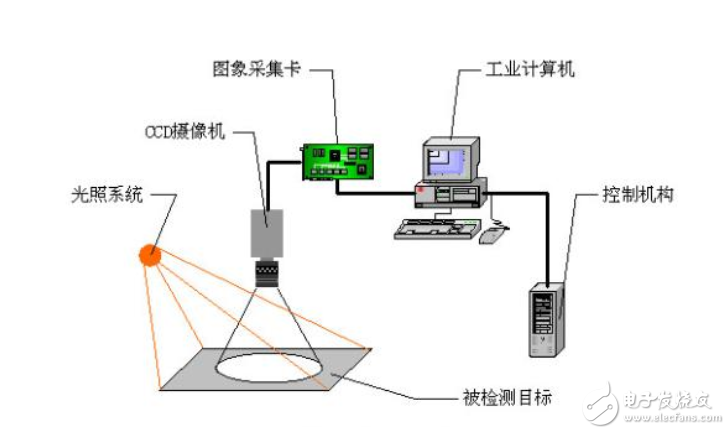
視覺測量系統工作原理圖
2、鋼管直線度、截面尺寸在線視覺測量系統
在工業生產中,無縫鋼管是一類重要的工業產品,而它的質量參數則是制造的重要數據,其中鋼管的直線度及截面積是主要的幾何參數,是控制無縫鋼管制造質量的關鍵,但由于以下原因使得參數的測量成為難題:(1)無縫鋼管采取非接觸式測量,且制造現場環境惡劣;(2)無縫鋼管的空間尺寸大,這也要求檢測系統具備很大的測量空間。視覺傳感技術的出現解決了上述問題,視覺傳感技術采用的是非接觸式測量且測量范圍大。
測量系統由多個結構光傳感器組成,傳感器上結構光投射器投射的光平面和被測鋼管相交,得到鋼管截面圓周上的部分圓弧,傳感器測量部分圓弧在空間中的位置。系統中每一個傳感器實現一個截面上部分圓弧的測量,通過適當的數學方法,由圓弧擬合得到截面尺寸和截面圓心的空間位置,由截面圓心分布的空間包絡,得到直線度參數。測量系統在計算機的控制下,可在數秒內完成測量,滿足實時性要求。
3、三維形貌視覺測量
在三維形貌數字化測量技術是逆向工程和產品數字化設計、管理及制造的基礎支撐技術。它所實現三維形貌數字化測量的機理是將視覺非接觸、快速測量和最新的高分辨力數字成像技術相結合。由于所測量的物體多是大型、具有復雜表面的物體,測量通常分為局部三維信息獲取和整體拼接兩部分,先利用視覺掃描傳感器對被測形貌各個局部區域進行測量,再采用拼接技術將各部分形貌進行拼接最終得到完整圖像。
這項傳感器的視覺掃描測頭采用局域雙目立體視覺測量原理設計。形貌整體拼接實質上是將所采集到的數據放到公共坐標上,這樣就能得到整體的數據描述。通過高分辨率數碼相機從測量空間的上方以不同的角度和位置對被測量進行數據收集,運用光束定向交匯平差原理得到控制點空間坐標并建立全局坐標系,最后通過各個坐標系進行關聯、轉換,完成數據拼接。
視覺源于生物界獲取外部環境信息的一種方式,是自然界生物獲取信息的最有效手段,是生物智能的核心組成之一。人類80%的信息都是依靠視覺獲取的,基于這一啟發研究人員開始為機械安裝“眼睛”使得機器跟人類一樣通過“看”獲取外界信息,由此誕生了一門新興學科——計算機視覺,人們通過對生物視覺系統的研究從而模仿制作機器視覺系統,盡管與人類視覺系統相差很大,但是這對傳感器技術而言是突破性的進步。
視覺傳感器技術的實質就是圖像處理技術,通過截取物體表面的信號繪制成圖像從而呈現在研究人員的面前。視覺傳感技術的出現解決了其他傳感器因場地大小限制或檢測設備龐大而無法操作的問題,由此廣受工業制造界的歡迎。
如何選擇視覺傳感器?
目前,如何選擇機器視覺傳感器在當代的應用可謂是越來越廣泛,如何選擇機器視覺傳感器是值得我們好好學習的,現在我們就深入了解如何選擇機器視覺傳感器。
相機是機器視覺系統的眼睛,而相機的心臟是圖像傳感器。傳感器的選擇取決于準確性、輸出、靈敏度、機器視覺系統的成本以及對應用要求的充分理解。對傳感器主要性能的基本理解能夠幫助開發人員迅速縮小他們的查找范圍,找到合適的傳感器。
大多數的機器視覺系統的用戶認識到相機是系統的關鍵要素,經常把它當作視覺系統的“芯片”。相機本身是一個復雜的系統:包括鏡頭、信號處理器、通訊接口,以及最核心的部分——把光子轉換成電子的器件:圖像傳感器。鏡頭和其它的部件共同配合來支持相機的功能,傳感器最終決定相機的最高性能。
業內的許多討論都集中在加工技術上,以及CMOS和CCD傳感器孰優孰劣。這兩種技術都有其優勢和不足之處,所加工的傳感器有著不同的性能。最終用戶關心的不是傳感器是“如何”被制造出來的,而是其在最終應用中的表現。
在指定的應用中,三個關鍵的要素決定了傳感器的選擇:動態范圍、速度和響應度。動態范圍決定系統能夠抓取的圖像的質量,也被稱作對細節的體現能力。傳感器的速度指的是每秒鐘傳感器能夠產生多少張圖像和系統能夠接收到的圖像的輸出量。響應度指的是傳感器將光子轉換為電子的效率,它決定系統需要抓取有用的圖像的亮度水平。傳感器的技術和設計共同決定上述特征,因此系統開發人員在選擇傳感器時必須有自己的衡量標準,詳細的研究這些特征,將有助于做出正確的判斷。
正確理解動態范圍
傳感器的動態范圍是最容易使人疑惑和誤解的地方,這是因為機器視覺系統是數字的。圖像的動態范圍包括兩部分:一是傳感器能夠工作的曝光范圍(亮度的倍數);其次是傳感器能夠數字化像素信號的電平的數量,用位數表示。這兩部分通常是緊密相關的。
曝光的動態范圍表示傳感器能夠正常工作的亮度水平。當光子撞擊圖像傳感器的活動像素區域時產生電子,傳感器將其捕獲并存儲起來以備系統讀取。撞擊活動區域的光子數越多,產生的電子數就越多,在讀取的間隔中,該過程持續的時間越長,被存儲的電子就越多。決定傳感器曝光動態范圍的參數之一就是填充存儲阱的曝光。制造傳感器的半導體加工工藝和電路設計共同決定阱的容量或深度。
電子噪音是傳感器能夠工作的最低曝光水平,盡管沒有任何光子撞擊活動的像素區域,圖像傳感器也將以熱量發射的形式產生電子。要產生可識別的信號,必須有足夠的光子撞擊活動的像素區域,以便在存儲阱中有比暗電流噪音所產生的電子數更多的電子。傳感器的最低曝光率是產生至少與噪音電子同樣多的光電子數。只有在超過噪音等量的曝光水平時,傳感器才能產生有用的信息。
傳感器的曝光動態范圍是由其物理和電路設計所決定的功能,而數字動態范圍只是由電路設計所決定的功能。圖像傳感器的數字動態范圍只是說明它能夠提供給視覺系統的明顯的曝光值。8位的傳感器有256個灰度級,10位的有1024個,以此類推。表示動態范圍的位數并不是反映傳感器能夠響應的最高曝光的必須要素,但是這兩者通常是相對應的。
比暗電流噪音水平小的等量的信號度不能產生有用的信息,類似地,如果數字化值大于傳感器的最大信號值,也不會產生額外的信息。在實踐中,傳感器需要設計成等量信號度與暗電流噪音水平等值,并有足夠信號步進度達到飽和的曝光信號水平。按此方式設計,傳感器的數字動態范圍與其曝光動態范圍說明的是同一事物:飽和等量曝光與噪音等量曝光的比率。
交互作用決定取舍
傳感器的動態范圍一定程度上決定機器視覺系統所產生的圖像質量,位數越高,系統能夠分辨的圖像的細節就越細微。對更低的暗電流噪音和高精度的需求的日益提高,使傳感器的成本變得越來越昂貴。然而,不是所有的應用都需要精細的圖像。因此,設計師們設計了不同動態范圍的傳感器供選擇。例如,郵包分揀或電子生產檢查,8位的動態范圍就可以有效地工作。但是,醫療和空中偵察就需要14位的動態范圍。
應用需求還對傳感器的第二項特征速度提出了要求
速度是比動態范圍更直觀的特征,它只是衡量傳感器采集和傳送圖像到系統的速度有多快。傳感器的速度也包括兩個方面:一個是幀頻,也就是傳感器傳送像素數據到系統所需要的時間。另外就是傳感器為了采集一幅有用的圖像所需的曝光時間。幀頻永遠都不會比曝光時間快,因此幀頻是用來說明傳感器性能的通用量值。
在加工檢查類的應用中,傳感器的速度決定系統的輸出。如果每一幅圖像代表待檢的一個零件,那么系統每秒能夠檢查的零件數量不會高于傳感器每秒能夠發送的幀數。當成像的物體處于運動狀態時,為防止出現圖像模糊,必須要求高的采集速度。因此對于高輸出量的檢測系統和對高速運動物體的成像應用需要高速的傳感器。
速度和動態范圍是相互關聯的,為了快速地傳送圖像,傳感器必須快速地對每一個像素的數據進行數字化。這就意味著模擬到數字轉換器需要快速地形成一個穩定的輸出。
從物理層面和設計角度上講,速度應該讓步于動態范圍。電路運行的速度越快,產生的熱量就越多。傳感器的暗電流噪音隨著溫度的增加而增加,因此傳感器的速度越高,其噪音就越大,動態范圍就越低。高速的傳感器比低速的傳感器的噪音更大,而且能提供的動態范圍更低。
傳感器的速度與其第三項特征響應度也是相關聯的
應用中所需的幀頻越高,用于曝光的時間就越少。為了減少曝光時間,設計師需要增加光照的亮度,如果不增加亮度,就只能選擇高響應度的傳感器。
響應度是指在給定的曝光條件下,所產生的信號的強度(V)。在圖像傳感器中,有三個因素控制響應度:第一是量子的效率,或者說是每個光子所產生的電子的數量。第二個要素是存儲電荷(q)的傳感器輸出電路的電容(C)的大小,電荷的信號電壓公式是V=q/C。第三個要素是傳感器的輸出放大器增益。如果傳感器在與噪音等量的曝光水平下運行時,增益本身并不能提高傳感器的響應度。
開發人員在為他們的機器視覺系統選購傳感器時,必須在動態范圍,速度和響應度這三個關鍵要素之間做出取舍。高速度和低光照度將導致噪音增加并降低動態范圍。在動態范圍允許的情況下,對成像細節的高要求也需要提高光照強度以彌補較低的響應度。傳感器本身所具有的物理屬性,不可避免地要在這三項關鍵要素之間做出平衡。
以上提到的三項關鍵要素并不是構成傳感器選擇的唯一考量,另外還有兩項重要的因素:傳感器的分辨率和像素間距,其中任何一項都能夠影響圖像的質量,并且與上述三項關鍵要素相互作用。
分辨率是指由多少個像素構成一幅圖像,它是反映傳感器尺寸和像素間距的量值。應用所需要的傳感器的分辨率決定于幾項相關的要素:包括視野、工作距離、傳感器大小和像素間距以及系統所要求的采集空間細節所需的像素的數量等。傳感器的分辨率越高,其時鐘必須運行得越快,以獲得需要的幀頻。因此,傳感器的分辨率對速度有非常大的影響。
像素間距定義單個像素區域的大小,與傳感器的大小共同作用來決定傳感器的分辨率。由于傳感器通常只有有限的大小可選,所以像素的間距越小,其分辨率就越高。像素間距能夠影響響應度,但是間距越小,每個像素能夠采集光子的活動區域就越小。
最終,所有這些傳感器的要素都要與相機的其它部件相互影響。相機鏡頭的分辨率是通過調制解調函數(MTF)來衡量的,例如,鏡頭的分辨率必須與傳感器的像素間距相匹配,才能獲得理想的成像質量。在傳感器分辨率允許的范圍內,一個5微米MTF的鏡頭在3微米的像素間距的傳感器上所成的黑白線模式只能形成灰色的圖像。因此,在選購傳感器時必須采購與之匹配的其它系統部件。
最重要的一點是要充分理解應用對傳感器動態范圍、速度和響應度的需求。需求決定哪些性能是在可接受的范圍之內,最終決定系統的其它部件的要求。
總結:視覺傳感器作為數字圖像處理的核心部件,相信隨著新材料、3D打印和人工智能等技術的突破,未來將會在更多領域大放異彩。
-
CMOS
+關注
關注
58文章
5684瀏覽量
235149 -
CCD
+關注
關注
32文章
879瀏覽量
142144 -
圖像采集
+關注
關注
2文章
299瀏覽量
41256 -
視覺傳感器
+關注
關注
3文章
248瀏覽量
22857 -
視覺檢測
+關注
關注
2文章
373瀏覽量
19209
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論