") 智能機器人的迷宮車控制系統(tǒng)是怎么工作的?這個講解我服
智能機器人的迷宮車控制系統(tǒng)是怎么工作的?這個講解我服
機器人在軍事偵察、掃雷排險、防核化污染等危險與惡劣環(huán)境中以及工業(yè)自動化生產(chǎn)的物料搬運上應(yīng)用很廣,隨著任務(wù)復(fù)雜性的增加,對移動機器人的要求也越來越智能化。然而,功能較完備的路徑跟蹤控制方法普遍具有計算復(fù)雜,不易實現(xiàn)等特點。主要針對移動機器人即智能小車的行走系統(tǒng)進行設(shè)計,以MCS-51單片機為控制核心的智能小車?yán)脝喂馐瓷淙?a target="_blank">紅外傳感器,探測正前方及左右兩側(cè)障礙物,利用控制算法尋找行進路線,在無人控制的情況下自主地走出迷宮。設(shè)計采用了輪式移動機構(gòu),使機器人能直線行走、左右轉(zhuǎn)彎、主要針對路徑跟蹤算法優(yōu)化問題,提出一種有效可行的方法,該法比以往算法更簡單易行。
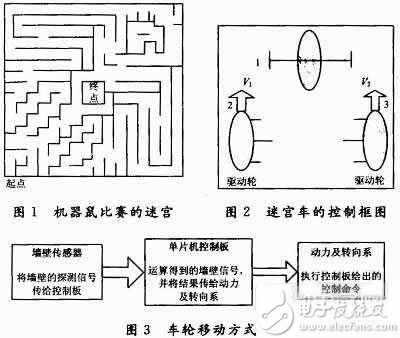
機器人應(yīng)當(dāng)具有幾個特征:移動功能,執(zhí)行功能、感覺和智能。目前全世界各國舉辦的涉及硬件,軟件仿真的機器人大賽不下20余類。各種各樣的機器人比賽都有一個共同的宗旨:培養(yǎng)科學(xué)創(chuàng)新精神,激發(fā)思維的想象力,鼓勵理論與實踐的結(jié)合。不僅如此,現(xiàn)在已經(jīng)有越來越多的自動控制產(chǎn)品已經(jīng)介入生產(chǎn),在農(nóng)業(yè)、工業(yè)上都有廣泛的應(yīng)用。新的工作方式將大大的縮短了人工作業(yè)的時間,并且減輕了人的體力勞動的支出。走迷宮的微型機器鼠主要是基于自動引導(dǎo)小車(Auto Guided Vehicle,AGV)的原理,實現(xiàn)機器鼠識別路線,判斷并自動躲避障礙,選擇正確的行進路線走出迷宮。在此選擇制作一個簡易的行進裝置,使其能順利的走避障或是迷宮。為了實現(xiàn)小車識別路線,判斷并自動躲避障礙,選擇正確的行進路線,障礙判斷采用單光束反射取樣紅外傳感器,驅(qū)動電機采用直流電機,控制核心采用MCS-51單片機。控制上采用分時復(fù)用技術(shù),僅用一塊單片機實現(xiàn)了信號采集、線路判斷、電機控制等功能。迷宮由16×16個區(qū)組成。起點設(shè)在拐角處,終點設(shè)在中央,占4個區(qū)。每個區(qū)為180 mm×180 mm大小,間壁高為50 mm,厚度為12 mm,側(cè)面涂白色,底面涂黑色,如圖1所示。
1 迷宮車控制系統(tǒng)的總體設(shè)計方案
迷宮車由墻壁傳感器、單片機控制板、動力及轉(zhuǎn)向系組成的,控制框圖如圖2所示。
迷宮車采用輪式移動方式。優(yōu)點是:結(jié)構(gòu)和控制簡單而且技術(shù)成熟。從選定電動機轉(zhuǎn)速和輪胎直徑,可以簡單地計算出小車的速度。但是,有關(guān)路面的阻力或上坡的驅(qū)動轉(zhuǎn)矩等成為重要的因素。考慮這點,在輪胎上使用無線遙控車的塑膠輪胎。如圖3所示,前輪1為萬向腳輪或球形輪,后輪2和后輪3為獨立驅(qū)動輪,利用它們的轉(zhuǎn)速差實現(xiàn)轉(zhuǎn)向。這種組合的特點是機樞組合容易,而且當(dāng)2個驅(qū)動輪以相同速度、相反方向轉(zhuǎn)動時車體能繞2個驅(qū)動輪連線的中點自轉(zhuǎn),值得注意的是自轉(zhuǎn)中心與車體中心不一致。
迷宮車車身材料的選擇。迷宮車使用的材料大部分用于結(jié)構(gòu),一般應(yīng)采用金屬材料。迷宮車承載和運動不應(yīng)產(chǎn)生嚴(yán)重的變形和斷裂,從力學(xué)角度講即具有足夠的強度。迷宮車負(fù)載小,自重輕,對壽命的要求不高。因此,選用鐵皮。
1.1 迷宮車控制電路的設(shè)計
控制電路主要由電機驅(qū)動電路,單片機接口電路,電源電路和傳感器電路組成。控制框圖如圖4所示。
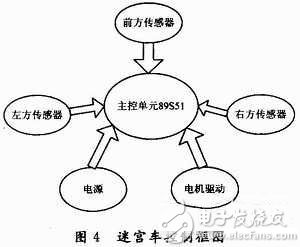
(1)紅外線光感電路傳感器通過發(fā)光二極管發(fā)出紅外線,若有障礙物在前方,紅外線會被反射回來,被感光三極管接收,單片機程序?qū)π盘栠M行比較處理,按設(shè)定的動作要求向后輪的兩個電機發(fā)出控制命令,控制小車行進。
(2)電機驅(qū)動電路采用89S51單片機,通過L293D芯片來控制兩個驅(qū)動電機動作。89S51根據(jù)紅外傳感器對外界進行探測后反饋回來的信號,依據(jù)迷宮車探路算法,判定迷宮車行進方向,分別向左右兩個驅(qū)動電機發(fā)出控制指令,該信號經(jīng)L293D芯片驅(qū)動后,直接控制相應(yīng)電機動作,使迷宮車按既定動作進行前進、后退、轉(zhuǎn)向。
-
MCS-51
+關(guān)注
關(guān)注
2文章
126瀏覽量
29235 -
智能機器人
+關(guān)注
關(guān)注
17文章
863瀏覽量
82210 -
迷宮車
+關(guān)注
關(guān)注
0文章
2瀏覽量
7204
發(fā)布評論請先 登錄
相關(guān)推薦
【書籍評測活動NO.51】具身智能機器人系統(tǒng) | 了解AI的下一個浪潮!
碼垛機器人的組成和工作原理
簡述工業(yè)機器人控制系統(tǒng)的特點
機器人控制系統(tǒng)的基本單元有哪些
機器人控制系統(tǒng)按控制方法可哪些種類
工業(yè)機器人電氣控制系統(tǒng)的體系結(jié)構(gòu)主要有哪些
工業(yè)機器人控制系統(tǒng)的基本組成有哪些
工業(yè)機器人控制系統(tǒng)的主要功能
簡述機器人控制系統(tǒng)的組成
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設(shè)計
淺談海康機器人控制系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論