 新的應用正把傳感器推向性能極限
新的應用正把傳感器推向性能極限
I. 引言
早于上世紀九十年代初,有意見認為電荷耦合器件(Charge Coupled Device,CCD)日漸式微,最終將成為“科技恐龍”[1]。如果用索尼公司(Sony)2015年的發布來看待,這個預言好像也有點道理:當時索尼公司正式發布終止量產CCD時間表,并開始接收最后訂單。雖然多年前業界已預計這是遲早出現的舉措,但是索尼這一發布仍然震驚了專業成像社群[2]。值得一提的是很多工業或專業應用(就是CMOS 圖像傳感器 (CIS) 的重點市場)到現在仍然基于CCD傳感器技術。到底CCD有什么特點優于CIS,使其更具吸引力呢?在發展初期,CCD和CIS兩種技術是共存的;后來CCD被視為能夠滿足嚴格圖像質量要求的高端技術,而同時期的CMOS技術仍然未成熟并受制于其固有噪聲和像素復雜性等問題。在這一時期,圖像技術仍然以模擬結構為主,而集成圖像處理功能(系統級芯片SoC)這一意念還沒有被認真考量。基于摩爾定律,技術節點的縮小使得SoC技術從2000年起快速擴展并更具競爭力。現在CIS繼續致力改進光電性能,在很多方面都顯得比CCD優勝。如果利用文首提到的“進化論”譬喻,其實可以把CIS視作抵過多次自然災害仍然存活的哺乳類動物,而這個進化歷史更是跨越6500萬年的史詩式故事!
II. CCD和CMOS:同源異種
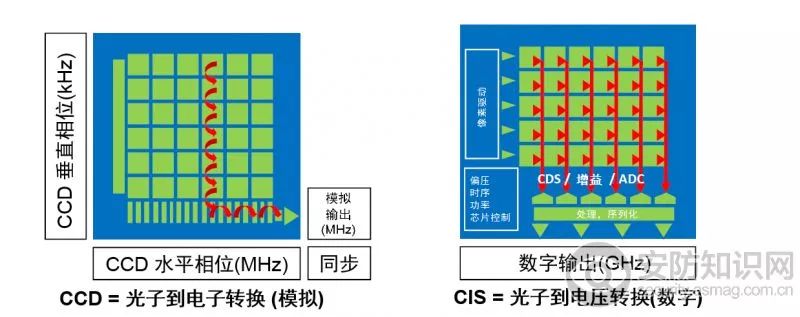
CCD的工作原理是將光子信號轉換成電子包并順序傳送到一個共同輸出結構,然后把電荷轉換成電壓。接著這些信號會送到緩沖器并存儲到芯片外。在CCD應用中,大部分功能都是在相機的電路板上進行的。當應用需要修改時,設計人員可以改動電路而無需重新設計圖像傳感器芯片。在CMOS圖像傳感器中,電荷轉換成電壓的工作是在每一像素上進行。CMOS圖像傳感器芯片在像素級把電荷轉換成電壓,而大部分的功能則集成進芯片。這樣所有功能可通過單一電源工作,并能夠實現依照感興趣區域或是開窗靈活讀出圖像。一般來說,CCD采用NMOS技術,因而能夠通過如雙層多晶硅、抗暈(antiblooming)、金屬屏蔽和特定起始物料互相覆蓋等特定工藝實現性能。而CMOS是基于用于數字集成電路的標準CMOS工藝技術生產,再根據客戶要求加入成像功能(如嵌入式光電二極管)。
一般的見解是CMOS圖像傳感器的生產成本比CCD低,因而它的效能也較CCD低。這個假設是基于市場需求的考量而出的,但是其它專業市場的意見卻認為兩者的技術水平相若,而CCD甚至可能更經濟[3]。例如大型主要的航天計劃仍然采用CCD元件,原因不單是CCD在小批量和低成本的考量下在工藝級實現性能優化,還有是長期穩定供貨的需求考量。同樣地,基于高端CCD的解決方案在科學成像市場也有主流占有率,而且還有一些新產品在開發階段。情況就是恐龍進化成飛鳥,而它們大部分都能夠提供優秀的成像功能……
CMOS的擁有經改進的系統復雜性,因為它基本上是嵌入了如模數轉換、相關雙采樣(CDS)、時鐘生成、穩壓器等系統級芯片(System-on-Chip,SoC)結構,或是圖像后處理等功能,而這些以前都是應用系統級設計才有的功能。現在的CIS通常是依照從180 nm到近期65 nm的1P4M (1層聚酯,4層金屬) 工藝生產,允許像素設計加入非常高的轉換因子,便于結合列增益放大。這使得CMOS的光反饋和光敏感度一般都比CCD為佳。相較于CMOS,CCD芯片的襯底偏壓穩定性更好且芯片上的電路更少,所以擁有更顯著的低噪優勢,甚至達到無固定模式噪聲的水平。
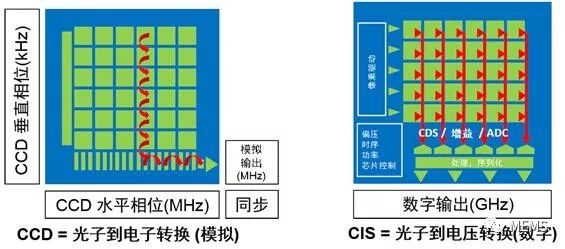
圖1 CCD和CMOS結構比較
表1 CCD和CMOS特點比較表

另一方面,CIS有較低采樣頻率,可以減小像素讀出所需要的帶寬,因而瞬時噪聲也較小。快門會同時對陣列上的所有像素進行曝光。但是CMOS圖像傳感器采用這一方法的話,由于每像素需要額外的晶體管,反而占用更多像素空間。另外,CMOS每一像素擁有一個開環輸出放大器,而因著晶圓工藝的差異,每一放大器的補償和增益會有所變化,使高或暗的不均勻狀況都比CCD傳感器差。相對于同級的CCD,CMOS圖像傳感器擁有較低的功耗,而芯片上其它電路的功耗也比CCD經優化模擬系統芯片匹配的解決方案來得低。取決于供貨量并考慮到CCD導入外部相關電路功能的成本,CMOS的系統成本也有可能低于CCD。表1總結了CCD和CMOS的特點,有些功能有利于一種或其他技術,所以毋需完全分割整體性能或成本。不過,CMOS的真正優勢是通過系統級芯片(SoC)方式實現導入靈活性,以及其低功耗特點。
III. 關于噪聲性能的常見誤解
視頻成像鏈的帶寬必需小心調整,以便最小化數字化階段的讀出噪聲。可是這一帶寬也必需足夠大以防止圖像出現其他缺陷。這一慣常做法也適用于CCD和CMOS。帶寬的最小閾值是信號由采樣達到足夠接近理想水平所需要的時間決定。誘發性錯誤應處于接近最低有效位(Least Significant Bit,LSB)的可忽略水平。要決定所需要的帶寬,可以應用下面的準則:

把放大鏈帶寬fc,信號頻率fs和N(即ADC解析率)置入算式計算。例如N=12時,數值則是:

噪聲最由兩個因素造成:1/f閃爍噪聲和熱噪聲(見圖2)。閃爍噪聲是大自然中常有的噪聲,而它旳頻譜密度和地球自轉速度、海底水流、天氣以至氣候現象等活動相關。研究報告顯示普通蠟燭的閃爍速率是1/f 。在MOS器件和放大鏈各元素中,閃爍噪聲則是技術工藝誤差生成的缺陷,使電荷被困于柵極氧化物內所造成的結果。電荷進出這些“陷阱”,造成晶體管通道內的電流不穩定[6],故又稱「隨機電報噪聲」(Random Telegraph Noise,RTS)。利用洛倫茲數學模型(Lorentzian mathematical model)可以形容每一個“陷阱”的共振行為,而模型的總和(即MOSFET通道表面范圍的所有“陷阱”總和)在1/f頻譜上展示時,會全完符合具體噪聲的頻譜密度。結果顯示,1/f波幅與MOSFET通道表面面積成反比──而不是完全直觀。
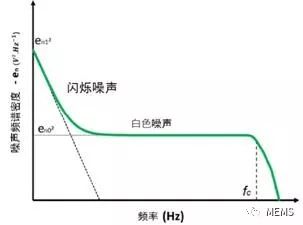
圖2 頻譜噪聲密度
要去除或減小CIS上的放大器共模差異,浮點的重置噪聲以至晶體管技術分散,視頻通道通常集成一個相關雙采樣(CDS)級。這一元素把視頻信號傳送函數依照下面的算式進行轉換:

在算式中,fs是采樣頻率,n是CDS因子(通常n=2)。如圖3顯示,取決于采樣頻率,這一濾波或多或少地去除1/f噪聲頻率成分,尤其是當采樣頻率fs很高的時候顯著(換句話說,電荷進出“陷阱”的動作將慢于CDS頻率)。HCDS濾波器結合放大鏈的低通濾波器可以簡化為一個如圖3所示的等效帶通濾波器。圖中的eqBP1 對應一個一級帶通濾波器。這裡eqBP1的噪聲頻譜函數要除以2,以得到一個帶有HCDS函數的等效集成噪聲功率。eqBP2 是eqBP1的陷波估算值。要取得集成噪聲功率,eqBP2 的上限和下限分別按照下列算式進行倍增:
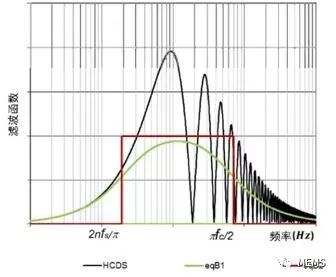
圖3 噪聲濾波函數
在圖2和圖3所示的一般狀況下,噪聲性能可依照下面的算式展示:
把算式(1)和(4)合并后,得出總體集成讀出噪聲估算值如下:

有關算式經驗證跟數字仿真結果相當匹配。CCD的讀出噪聲可達到非常低水平,適合如天文或科學成像,這些應用領域的讀出頻率可以非常低。系統設計包含有最小頻帶寬的電子元素,以避免集成進信號的不穩定時脈。在這些應用中,噪聲的1/f元件有主導地位。在高速視頻應用中,高噪聲使得信噪比顯著變差。從多個不同CCD視頻相機錄得的具體噪聲表示狀況數據,確認了有關理論 [5] 。CMOS 圖像傳感器的列式平行讀出布局(見圖1)在這一方面提供優勢。閾值讀出頻率除以列數,再與CCD數值比較。在這里,CIS的讀出噪聲主要由1/f數值主導。這有助于進一步改進CMOS技術在成像方面的性能。近期的結果顯示,CIS可提供達到1E-或更低范圍的優秀噪聲性能。
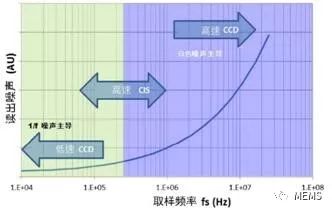
圖4 讀出噪聲作為fs的函數IV. MTF 和 QE:成像質量的支柱
量子效率(Quantum efficiency,QE)是直接影響圖像傳感器光電性能的因素,因為光電轉換效率的任何損耗都會直接減低信噪比(Signal-to-noise ratio,SNR) 。它的影響是兩方面的,因為當散粒噪聲(信號的平方根)是主要噪聲源時,QE不單是信噪比的被除數(信號),同時也是除數(噪聲)。在這一點之上,CCD和CMOS處于同一水平,可是CCD在QE改進方面累積有多年的技術工藝優化,而在CIS的QE改進發展相對較遲。基于硅物質的物理特性,較長的波長能穿透光敏轉換地帶,所以會使用厚的外延材料來增加上紅色和近紅外線波長的QE。根據比爾朗伯定律(Beer-Lambert law),被吸收的能量是與介質的厚度成指數關係。高端應用的CCD利用較厚的硅物質和背照(Back Side Illumination,BSI)工藝以恢復高寬帶QE和近紅外(near infrared,NIR)敏感度,因而擁有優勢。
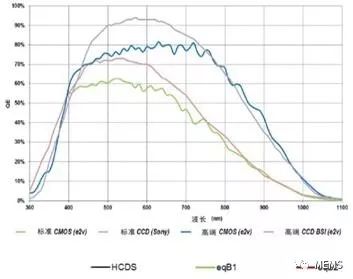
圖5 QE指標
隔行傳輸CCD(Interline Transfer CCD,ITCCD)是基于特定的生產工藝,導入所謂的“垂直溢漏”(Vertical Overflow Drain,VOD)或“垂直抗暈”(Vertical Anti-blooming,VAB)功能。VAB開發于1980年代初期,具有非常好的性能,但缺點是會減低紅色的反饋并拒絕頻譜中的NIR部分。

圖6 深耗盡方法
因為這個原因,ITCCD不能從BSI中獲益。而高端CCD因為使用垂直抗暈工藝,所以沒有這一限制。而CMOS也具有同一特點:在薄的感測層上,因為電荷不會在像素之間滲透,所以沒有串擾的缺點。結果是ITCCD和標準CIS都能夠實現良好的空域解析度或調制轉換函數(Modulated Transfer Function,MTF) 。要增加NIR部份和敏感度,需要顯著增加物料厚度,但是厚物料會增加光電串擾,引致MTF衰減。成像質量是MTF和QE的綜合結果(即所謂的檢測量子效率Detective Quantum Efficiency,DQE),所以必需同時考量空域和時域因素。圖6顯示利用硅摻雜方法恢復MTF的深耗盡(deep depletion)光電二極管。一般來說,CIS使用類似集成電路的常用技術(特別是DRAM/內存工藝)生產,所以不會牽涉上述的特定工藝配方。不過近期的技術研究文章展示適用于CIS的特定工藝導入方案,能實現出色的QE改進甚至相對接近高端CCD的水平(見圖5) [9][10]。最新的CMOS技術趨勢可說是突飛猛進,引進了如導光板、深槽隔離(Deep Trench Isolation,DTI)、埋藏微透鏡,以及在光敏范圍下嵌入包含像素晶體管的迭層芯片等技術。
V. 固有缺陷
“嵌入式光電二極管”(Pinned Photodiode,PPD)或“空穴堆積二極管”(Hole Accumulation Diode,HAD)最初開發目的是消除延遲并把全部電荷從光電二極管轉移到ITCCD寄存器[12]。CMOS圖像傳感器的一個重大發展是在2000年代初期引進ITCCD光電二極管結構[11],如圖7所示。在CMOS中,像素結構多數以每像素的晶體管數目來表示。大部分 CMOS圖像傳感器傾向使用電子卷簾快門(electronic rolling shutter),這有助于集成并只需少至三個晶體管(3T)就能實現。雖然有結構簡單的優點,3T像素結構的缺點是電路來自kT/C(或溫度)噪聲的像素生成時域噪聲會較大,而且不能輕易消除。
圖7 ITCCD和5T CMOS圖像對比圖
嵌入式光電二極管最初引進到CIS以去除來自浮動擴散重置的噪聲,后來并引進到四晶體管像素(4T)結構中。4T結構進行相關雙采樣(CDS)以消除重置瞬時噪聲。這一結構也允許晶體管在像素間共用布局,以便于把每像素的有效晶體管數目減到兩個或更少。事實證明,每像素的晶體管數目減少,能夠空出更多范圍供光敏部分或填充因子去更直接地把光線耦合到像素上。不過如圖8所示,在獲取視頻或包含快動作的圖像時,ERS會導致更多圖像變形。PPD會在第二級時工作,以進行全局快門(GS)獲取。它能夠去除ERS偽影并進一步消除時域噪聲、暗電流和固定模式噪聲。接近PPD的第五個晶體管(5T)的功能是排除過多的電荷并調整重迭模式的集成時間(在集成時讀出)。
圖 8 圖像瑕疵:CMOS ERS變形
全局快門(GS)模式一般配合ITCCD使用,但在某些狀況下會對彌散現像敏感。
圖9 圖像瑕疵:CCD彌散
彌散是在電荷轉移時出現的現像,會在影像上產生直線如圖9。這瑕疵在高反差圖像上尤其顯著,但不應把它和相似的光暈現像混淆。最常用的解決方案是導入幀行間轉移(Frame Interline Transfer,FIT)CCD結構,而FIT也擁有較高視頻速率的優點。與CMOS等效的彌散參數是全局快門效率(Global Shutter Efficiency,GSE),有時也稱為寄生光敏度(Parasitic Light Sensitivity,PLS),是對應于傳感節點到光電二極管的敏感度比例。ITCCD的GSE值一般介乎于-88dB到-100dB[13],在CMOS則是-74dB到-120dB甚至是3D迭層結構的-160dB[14] 。利用先進定制像素微鏡片(如zerogap)可在從改進波長反饋的敏感度到減小CMOS像素上的二極管所造成的填充因子損失方面實現顯著的分別。它也是改進GSE性能的主要因素。
VI. CMOS成像技術的未來
CCD技術特別適合時間延遲積分(Time Delay Integration,TDI)領域。TDI(在掃描場景時,電子同步的積分和累加)的導入相對直接,只需要一個電荷轉移器件就可以完成。這技術最初用于信噪比最大化,然后用于CIS CCD以保存良好的圖像定義(MTF)。近年多個于模擬區域(電壓)[18]或數字區域復製信號累加的嘗試,為CMOS TDI開拓新的發展方向。不論在太空地面觀測或是在機器視覺方面,CCD延遲積分結構的低噪聲和高敏感度性能都廣受歡迎。不過現時最令人期待的發展是基于CMOS工藝、但擁有CIS CCD的優點以及電荷轉移寄存器結合行式ADC轉換器的技術[17] 。雖然有長足進步,CMOS圖像傳感器的敏感度在光線非常微弱應用(如只有幾十微流明的環境)仍然受限于讀出噪聲。使用電子倍增技術的EMCCD[15] 顯示出在降噪方面的巨大潛力,因而受到科學成像市場的注意。一般來說,就如CCD被CMOS傳感器取代一樣, EMCCD也有潛力朝著電子倍增CMOS(electronmultiplying CMOS,EMCMOS)的方向發展[20]。一如EMCCD,EMCMOS計劃改進光線非常微弱應用中的圖像質量,以配合科學或監視方面的應用。CMOS技術有助于實現更小更具智能的系統、降低功耗,以減低量產的成本(即所謂的SWAP-C方法)。電子倍增的原理是在讀出鏈任何加入任何噪聲前為信號進行增益,使得噪聲被增益攤分,以改進信噪比。基于CCD原理,信號會以電子包的形式傳送,然后在讀出之前共同對每一個像素進行倍增。CMOS的信號是在電壓域,因而倍增工作必需在源跟隨晶體管把噪聲加進信號并傳送到浮點之前完成[16]。隨著3D成像的流行,需要物件深度的信息,飛行時間(Time-of-Flight,ToF)技術在這一方面派上用場。ToF的原理是在傳感器平面上設置人工脈沖光源并發射出去,然后把反饋的反射波段用于相關函數計算來得出距離。這一技術于1995年于 “鎖定”CCD中首次提出[21]。而ToF在CMOS的應用則是由CCD像素的啟發而來[22]。另一方法則是使用電流輔助光子解調器(Current Assisted Photonic Demodulators,CAPD)測量深度。兩種方法都實現了工業3D傳感器的量產并實現了一系列的應用如計算人數、安全監控、計量學、工業機器人、手勢辨識和先進汽車駕駛者輔助系統(ADAS)等。這是都是CCD技術衍生的意念成功過度到CMOS作改進,再實現工業應用大規模導入的典型例子。
CMOS技術導入也衍生出新的應用范圍。舉個例子,跟CCD在1980年代在專業相機領域替代現像管(vidicontubes)相似,單光子雪崩二極管(Single- Photon Avalanche Diode,SPAD)原來的開發目的是作為光電倍增管(Photomultipliertubes,PMT)的固態替代產品。SPAD基本上是在所謂的蓋革模式(Geiger mode)中,依照擊穿模式上的反壓進行偏置的p-n 結。不過這結構十分不穩定,任何能量改變都會導致雪崩效應。這一特點被用于單光子感測。通過在SPAD和輸入電壓之間導入一個簡單的電容元件,利用被動抑制原理開閉雪崩,或使用嵌入式MOSFET通道啟動主動抑制原理達到同一目的。這樣就可以製作代表量子事件的數字信號。根據原理,SPAD一個基于簡單結構的CMOS技術,無需用于圖像傳感器的專門工藝。不過因為它需要復雜的電路,SPAD陣列的工作也較為復雜。跟光子的到達一樣, SPAD的引發和事件記數依定義是非同步的。CMOS技術因而是不二之選。例如這就能夠非常快速地啟動掃描像素陣列,以確認已轉換的像素。這些幀組合后就能製作一個視頻序列 [23]。
VII. 總結
早期一些宣稱CCD年代終結的文章已被視為預言[1],只是實際的過渡時間比預計的長許多。另一方面開發用于CMOS圖像傳感器的圖像結構種類和創新性都大大超越前人想像。隨著晶體管蝕刻工藝縮小化和CMOS生產技術演進,這些創新都變得可行。大型工業成像廠商除了價格,還繼續在光電性能方面進行競爭。現在的使用者已經不是單單在乎于拍照,而是獲取人生中各個重要時刻,因而期待不論在任何光線狀況下都能拍出完美的照片。工業應用也因著這些改進,在其它一般范圍上得益。越來越多視覺系統也基于消費者市場趨勢而調整其圖像傳感器要求,圖像縮小就是一個例子。而高速處理能夠提升高成本生產機器的產量并實現自動化工藝和檢查,所以也是一個重要的經濟因素。新的應用正把傳感器推向性能極限并不允許圖像內有更多噪聲,推動了單光子成像技術。除了簡單的攝影和顯示,3D增強現實技術也用盡了CMOS技術的所有潛能,提供另類的視覺空間體驗。一如地球上的主要物種,CMOS圖像傳感器已經大大進化并適應其周遭環境。
-
CCD
+關注
關注
32文章
879瀏覽量
142144 -
CIS
+關注
關注
3文章
192瀏覽量
29593 -
COMS
+關注
關注
1文章
91瀏覽量
33060
原文標題:CMOS圖像傳感器步入新時代
文章出處:【微信號:icbank,微信公眾號:icbank】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
傳感器像素尺寸破極限僅五十納米
傳感器選用原則
如何選用傳感器
傳感器性能術語詳解
汽車中的傳感器原理是什么
納米YSZ基擴散控制極限電流型氧傳感器的研究
如何讓微控制器性能發揮極限

解析CCD 和 CMOS原理、特點、噪聲、固有缺陷以及CMOS 成像技術的未來





 工商網監
工商網監
評論