 簡單的介紹人機協作機器人UR
簡單的介紹人機協作機器人UR
在這幾年,各大工業機器人制造商,目前都熱衷與人機協作,ABB的“玉米”,FANUC的“綠手臂”,KUKA的“伊娃”等等,在人機協作走的比較前的也就數UR了,我們來簡單介紹下UR的黑科技,來看下如何用手來教訓機器人。
UR5 機器人自重很輕(僅 18.4 kg ),可以方 便地在生產場地移動,而且不需要繁瑣的安裝與 設置就可以迅速地融入到生產線中,與員工交互合作。編程過程可通過教學編程模式實現,用戶可以扶住 UR 機械臂,手動引導機械臂,按所需的 路徑及移動模式運行機械臂一次, UR 機器人就能 自動記住移動路徑和模式。機器人通過一套獨特 的、友好的圖形用戶界面操作,在觸摸屏幕上, 有一系列范圍廣泛的功能讓用戶選擇。任何重復性的生產過程,都能夠使用它并從中受益。
1、機器人運動軸的名稱
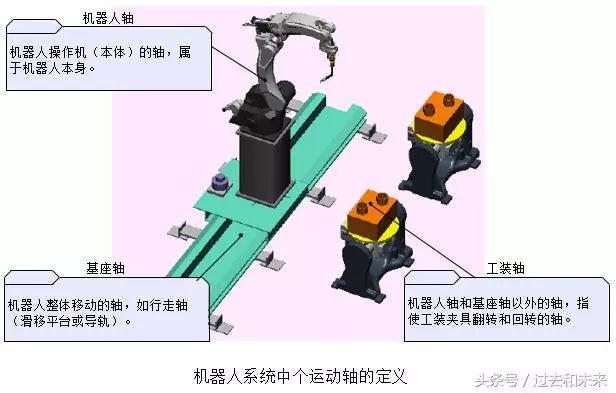
通常機器人運動軸按其功能可劃分為機器人軸 、基座軸和工裝軸 ,基座軸和工裝軸統稱外部軸 。
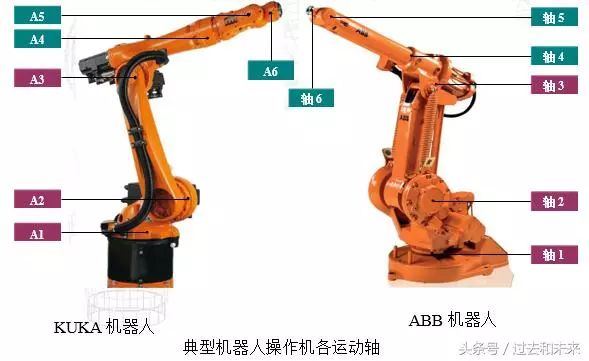
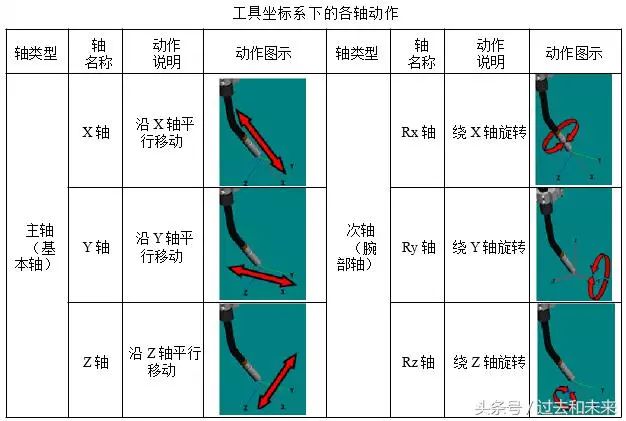
A1 、A2 和 A3 三軸(軸 1 、軸 2 和軸 3 )稱為基本軸或主軸, 用以保證末端執行器達到工作空間的任意位置。A4 、A5 和 A6 三軸(軸 4 、軸 5 和軸 6 )稱為腕部軸或次軸, 用以返回實現末端執行器的任意空間姿態。
2、機器人坐標系的種類
目前,大部分商用工業機器人系統中,均可使用關節坐標系、直角坐標系、工具坐標系和用戶坐標系, 而工具坐標系和用戶坐標系同屬于直角坐標系范疇 。
TCP 為機器人系統控制點,出廠是默認位于最后一個運動軸或安裝法蘭的返回中心,安裝工具后 TCP 點將發生改變。

(1) 關節坐標系
在關節坐標系下,機器人各軸均可實現單獨正向或反向運動。對大范圍運動,且不要求 TCP 姿態的,可選擇關節坐標系。

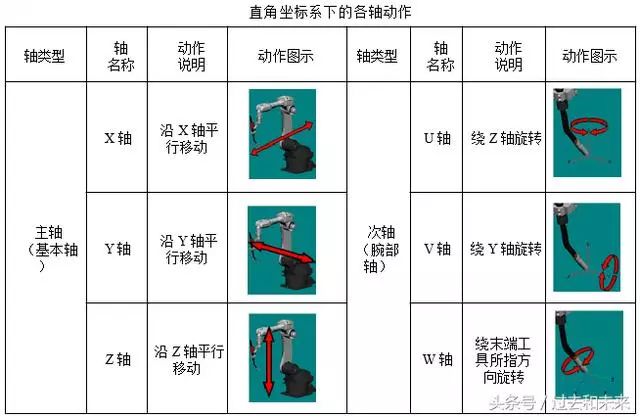
(2) 直角坐標系(世界坐標系、大地坐標系)
機器人示教與編程時經常使用的坐標系之一 ,原點定義在機器人安裝面與第一轉動軸的交點處, X 軸向前, Z軸向上, Y 軸按右手法則確定。

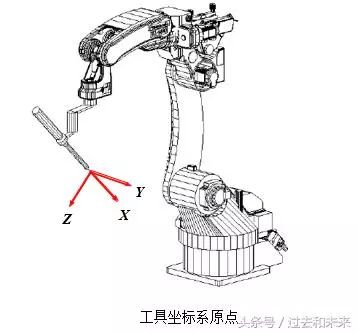
(3) 工具坐標系
原點定義在 TCP 點,并且假定工具的有效方向為 X 軸(有些機器人廠商將工具的有效方向定義為 Z 軸),而 Y 軸、 Z 軸由右手法則確定。 在進行相對于工件不改變工具姿態的平移操作時選用該坐標系最為適宜。
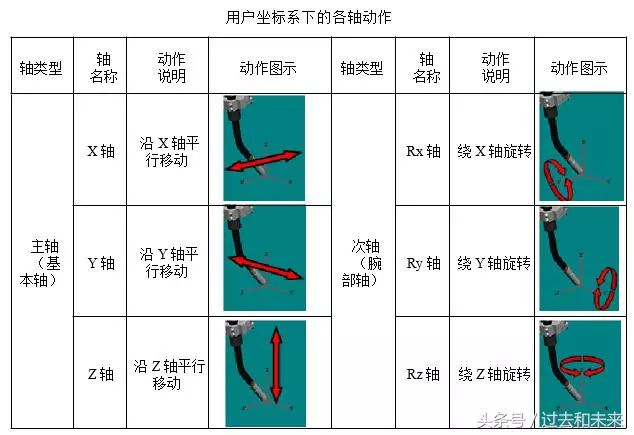
(4) 用戶坐標系
可根據需要定義用戶坐標系。 當機器人配備多個工作臺時,選擇用戶坐標系可使操作更為簡單 。在用戶坐標系中, TCP 點將沿用戶自定義的坐標軸方向運動。

不同的機器人坐標系功能等同,即機器人在關節坐標系下完成的動作,同樣可在直角坐標系下實現。
機器人在關節坐標系下的動作是單軸運動,而在直角坐標系下則是多軸聯動。除關節坐標系以外,其他坐標系均可實現控制點不變動作(只改變工具姿態而不改變 TCP 位置)在進行機器人 TCP 標定時經常用到。

3、認識示教器

-
機器人
+關注
關注
210文章
28195瀏覽量
206507
原文標題:關于人機協作機器人UR的介紹
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
智能制造時代來臨 工業機器人發展迎來新趨勢
機器人VS人:替代還是協作?
協作機器人伺服和傳感器核心器件揭秘
協作型機器人的應用類型
機器人圈專訪:對新品人機協作Sawyer機器人都有什么看法?
值得關注的十大人機協作機器人的簡單介紹
協作機器人的起源_為什么需要協作機器人
優傲機器人宣布交付其第50000臺UR協作機器人
什么是協作機器人?協作機器人如何選擇

交互的藝術:協作機器人如何定義新一代的人機關系?





 工商網監
工商網監
評論