 能隨時隨地通過網絡訪問該平臺所有電機的控制系統
能隨時隨地通過網絡訪問該平臺所有電機的控制系統
近年來,隨著因特網的日益普及和網絡遠程控制技術的發展,利用網絡對實驗室或者工業現場中控制對象進行遠程控制,已經越來越受到重視,應用范圍也越來越廣泛。以Internet為基礎的遠程控制方式,可以避免現場環境對用戶的不良影響,不需要建立特殊的操作站或者輔設專用線路,而是直接利用現有的網絡設施提供的價格低廉的通信線路作為系統構架,硬件設備投資少,大大降低了遠程控制系統的成本。與傳統的控制技術相比,基于網絡的多對象遠程控制系統利用計算機作為網絡信號傳輸終端,不僅能夠延長控制器與被控對象之間的空間距離,而且具有較高的故障診斷能力,安裝與維護簡單,可以提高系統的靈活性和可靠性。而且控制網絡技術正向體系結構的開發性網絡互聯方向發展,開放性控制網絡具有標準化、可移植性、可擴展性和可操作性。
NI myDAQ 是美國國家儀器有限公司(National In-struments,NI)推出的一款便攜式儀器,在輕巧的組成結構中集成了8款最常用的軟件儀器,而且配有USB即插即用功能,可針對各種測量進行快速方便的采集與顯示,方便了控制信號的輸入輸出。NI myDAQ將軟件與硬件集合成了一個整體。硬件上myDAQ集成多達20路的信號通道,其中包含了8路數字I/O,4路模擬I/O口以及示波器、數字萬用表、各類電源和伯德圖分析儀,一方面可以方便的利用這些數據通道采集被控對象狀態信息、發送控制命令,另一方面還可以將實驗結果借助于虛擬儀器形象化的表達出來。在軟件上myDAQ的開發采用圖形化系統設計軟件LabVIEW 進行編程設計,利用集成化、形象化、模塊化的圖形編程方式可以快速方便的編制出實驗程序。采用LabVIEW的基于Web發布工具可以方便的實現網頁的遠程發布,為遠程控制提供了可能。本項目研究的“基于myDAQ的遠程多對象控制系統”可實現隨時隨地通過網絡訪問該平臺完成交流電機、直流減速電機、伺服電機、倒立擺、步進電機、電阻爐的相關控制和任意切換,極大的方便了教學及實驗需要。
1 系統的整體設計與工作流程
基于Internet 的遠程控制系統的模式主要有C/S(Client/Server)結構、B/S(Brower/Server)和C/S/B(Client/Server/Brower)結構[3].C/S/B 常用于大型的集散控制系統的發布和遠程控制,適用于虛擬儀器測控系統。C/S模式適合于局域網環境,但是使用用戶數量有限,系統擴展維護較為復雜、軟件的開發成本也較高。B/S模式下,主要由現場過程控制實驗裝置、遠程實驗代理服務器、Web服務器、數據庫服務器、遠程實驗工作站等組成,通過實驗室的以太網和Internet將它們連接起來。B/S模式具有客戶端數量不受限制、軟件開發相對簡單、系統擴展維護簡單等優點。所以,本設計選擇B/S模式。
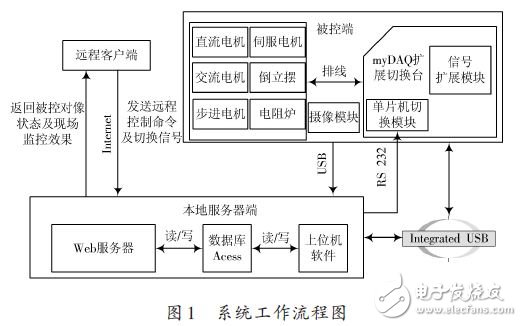
該系統主要由3 大部分組成:遠程客戶端、本地服務器端、現場被控端。其中又以現場被控端的設計最為復雜。遠程客戶端是一臺連入因特網的計算機。本地服務器端是一臺裝有Web 服務器的主機,該主機需要安裝LabVIEW及相關驅動的軟件。該主機是使遠程客戶端和本地服務器端進行通信的橋梁。現場被控端又細分為三部分:信號源擴展及切換控制平臺、多對象驅動控制臺(直流減速控制臺、交流電機控制臺、伺服電機控制臺、步進電機控制臺、倒立擺控制臺、電阻爐控制臺)、攝像頭監控。
該遠程控制系統完成后,實驗者可以通過任意一臺接入因特網的計算機來登錄遠程控制系統。通過鏈接進入整個系統的網址,驗證操作者的身份后進行操作,此時要求本地服務器端相關的LabVIEW軟件及VI程序是打開的。操作者進入運行界面后可選擇對應的控制臺進行遠程控制。當選擇某一個控制臺時本地服務器就會將相應的命令信號通過串口和采集卡分別送到信號源擴展及切換控制平臺上的單片機和myDAQ,這樣myDAQ 就會切換到對應的控制平臺上,此時該平臺上的所有信號也和myDAQ 連通了,從而有效地進行相關控制。其工作流程如圖1所示。
2 本地服務器
本地服務器主要包括實驗室服務器(Lab Server)和服務代理端(ServICe Broker),是實驗系統的基礎,是連接實驗客戶端和實驗儀器設備的橋梁。服務器為用戶構建一個遠程實驗交互平臺,負責整個系統的任務調度和網絡管理等工作。系統采用B/S模式,絕大部分運算和處理功能在Web服務器端實現。
遠程控制的發布實現過程如下:通過開啟Lab-VIEW 的Web 服務器,可以在網頁上發布LabVIEW 程序,使本地或遠程的客戶端計算機可以實時瀏覽或控制Web服務器中的遠程面板,實現生產環境的遠程控制。
使用LabVIEW 的Web 發布工具:Tools/Options,在彈出的對話框中完成與Web服務器有關的設置和LabVIEW程序的發布通過Tools/Web Publishing Tools對話框,可以將Web內存中的程序,以網頁的形式發布,在客戶端進行瀏覽。遠程客戶端根據安裝軟件的不同可采取相應的訪問登錄方式。
本設計選擇使用網頁瀏覽器在網頁中操作遠程面板。當進入遠程控制前面板之后,實驗者單擊鼠標右鍵,然后在彈出的菜單中申請vi控制權,當多個遠程客戶端同時申請控制權時,只能有一個客戶端有控制權,其他的需在控制權釋放后重新申請并獲得控制權。
3 現場被控端設計
下位機被控端的設計是整個控制系統的核心部分,主要包括:信號源擴展及切換控制模塊的設計、被控對象控制模塊、LabVIEW程序實現。
3.1 信號源擴展及切換控制模塊設計
為了保持與原有系統的兼容性,擴展信號的通道與原有實驗平臺的數據通道保持一致,結合NI公司提供的內部引腳資料進行擴展設計。設計中運用模擬開關技術,模擬開關是一種能夠按照控制指令對模擬信號傳輸進行通斷控制的電路器件。通過模擬開關芯片CD4053、CD4051將myDAQ 上的信號擴展成六路信號,然后將每一路信號匯總通過排線連接至六個控制分板。模擬開關在應用中,一定要注意輸入信號不要超出規定的范圍。
對于切換控制模塊,將其與信號擴展模塊做在同一塊電路板上,圖2是信號源擴展及切換板的PCB圖。
切換控制模塊主要采用AVR 單片機系列中ATmega8,ATmega8 是一款采用低功耗CMOS 工藝生產的基于AVR RISC結構的8位單片機,片內集成了較大容量的非易失性程序和數據存儲器以及工作存儲器。利用AVR 單片機的軟編程技術,在單片機FLASH 底層固化一個Bootloader程序,來引導遠程傳來的程序數據寫入FLASH應用區。本設計就是利用該原理設計的單片機切換程序。
3.2 被控對象控制模塊設計
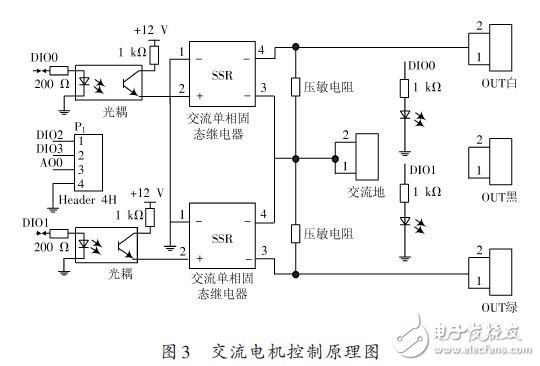
對于被控對象控制模塊,主要包括被控對象平臺板及被控對象(直流減速電機、交流電機、伺服電機、步進電機、倒立擺、電阻爐)控制模塊的設計。被控對象平臺板是將擴展板上分出的六路信號收集起來,然后在分至PCI口和拓展口。這里以交流電機的控制板設計為例進行說明。
交直流電機的控制主要有電機的啟動、停止;電機的換向;電機的變頻調速。其控制原理圖如圖3所示。
3.3 LabVIEW程序實現
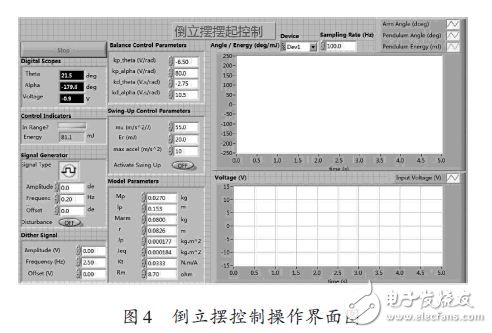
編程實現采用LabVIEW 軟件進行編寫,這是一種圖形編程語言也叫G 語言[11]。這一部分主要由實驗選擇切換界面、被控對象操作界面、攝像監控界面三部分組成。實驗選擇切換界面包括選擇實驗預覽按鈕和操作按鈕,選擇某一實驗預覽按鈕,將彈出實驗介紹圖片,便于用戶了解和學習實驗原理并預覽實驗效果圖。選擇相應被控對象開始試驗按鈕,則彈出對應不同被控對象控制板的LabVIEW 操作子VI.攝像監控界面利用LabVIEW 軟件自帶的工具包編寫然后嵌在每個被控對象控制程序里面。被控對象操作界面的編程設計是重點,倒立擺控制的操作界面如圖4所示。
4 遠程客戶端設計
實驗客戶端是運行在網絡終端的用戶計算機。因為控制平臺的程序都由服務器承載和執行,并且提供了相應的操作界面,任何連接在Internet上的PC機都可以使用瀏覽器登錄到網站進行遠程控制。
此時要求本地服務器端相關的LabVIEW軟件及VI程序是打開的。操作者進入運行界面后可選擇對應的被控對象控制臺進行遠程控制。當多個客戶端同時監控服務器端時,可以多個同時控制,但只能有一個客戶端有控制權,其他的需等待釋放后獲得控制權。
5 結論
本文的基于myDAQ的遠程多對象控制系統的設計方案, 該方案中的遠程控制系統成功的結合了單片機IAP技術、模擬開關技術以及LabVIEW 的Web 發布技術,實現了不拘于時間、地點、場地要求的多種被控對象遠程控制系統。用戶只需一臺聯網的普通PC 機即可完成相應功能。通過本系統一方面可以遠程控制現場的各種被控對象,另一方面通過攝像頭還可以對現場的運行狀況進行查看,增加了真實性。該系統已經通過了測試在學校范圍內穩定運行。而且底層平臺還具有很強的擴展性,用戶可以根據自己的需要在被控端添加其他的被控對象,簡單快捷、實用性高。
-
信號源
+關注
關注
5文章
464瀏覽量
44332 -
計算機
+關注
關注
19文章
7418瀏覽量
87712 -
電機
+關注
關注
142文章
8930瀏覽量
145089 -
因特網
+關注
關注
1文章
40瀏覽量
12790
發布評論請先 登錄
相關推薦
GPS衛星定位兒童手機 隨時隨地找到孩子
華強網正式推出手機版了,隨時隨地做生意,在車上、在...
【創龍AM4379 Cortex-A9申請】 智能家居控制系統設計
用于電機控制系統與設計(6)
使用matlab設計電機控制器與基于Matlab的PMSM電機控制系統虛擬開發平臺設計
基于機智云服務平臺的媒體設備控制系統

2022百度世界大會—飛槳賦能477萬開發者 讓AI隨時隨地在身邊

虹科方案 | HK-Edgility系統隨時隨地保護您的遠程工作






 工商網監
工商網監
評論