") 8軸/4軸的EtherCAT軸模塊EIO24088-V2及EIO16084的使用(一):RTSys總線配置與使用
8軸/4軸的EtherCAT軸模塊EIO24088-V2及EIO16084的使用(一):RTSys總線配置與使用
EIO24088-V2及EIO16084擴(kuò)展模塊配合正運(yùn)動的主站控制器的使用分為三步。第一步:進(jìn)行硬件接線;第二步:總線初始化建立EtherCAT通訊連接,初始化中需要對擴(kuò)展的軸資源和IO資源的進(jìn)行映射防止與控制器的資源產(chǎn)生沖突;第三步:通過相應(yīng)指令讀寫IO及控制電機(jī)運(yùn)動。
今天正運(yùn)動小助手給大家分享一下EIO24088-V2及EIO16084如何用RTSys進(jìn)行總線配置和使用。
EIO24088-V2擴(kuò)展模塊硬件介紹
EIO24088-V2總線擴(kuò)展模塊是EtherCAT總線控制器使用的擴(kuò)展模塊,當(dāng)數(shù)字IO、脈沖軸資源不夠需要擴(kuò)展增加的時候,控制器可通過EtherCAT總線連接多個EtherCAT擴(kuò)展模塊進(jìn)行擴(kuò)展。控制器可通過映射編號直接訪問EIO24088-V2的IO資源和軸資源。

支持8個脈沖軸進(jìn)行擴(kuò)展;
支持?jǐn)U展24路數(shù)字量輸入和8路數(shù)字量輸出,每個脈沖軸另外各有1路數(shù)字量輸入和1路數(shù)字量輸出可供配置;
脈沖輸出模式為方向/脈沖或雙脈沖輸出;
每軸最大輸出脈沖頻率10MHz;
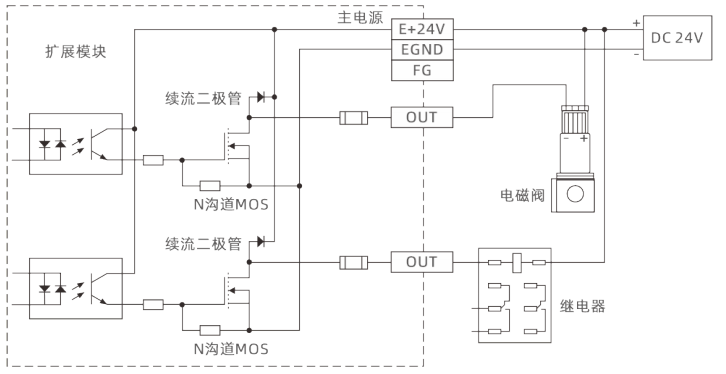
脈沖軸以外的輸出口最大輸出電流達(dá)300mA,可直接驅(qū)動部分電磁閥。
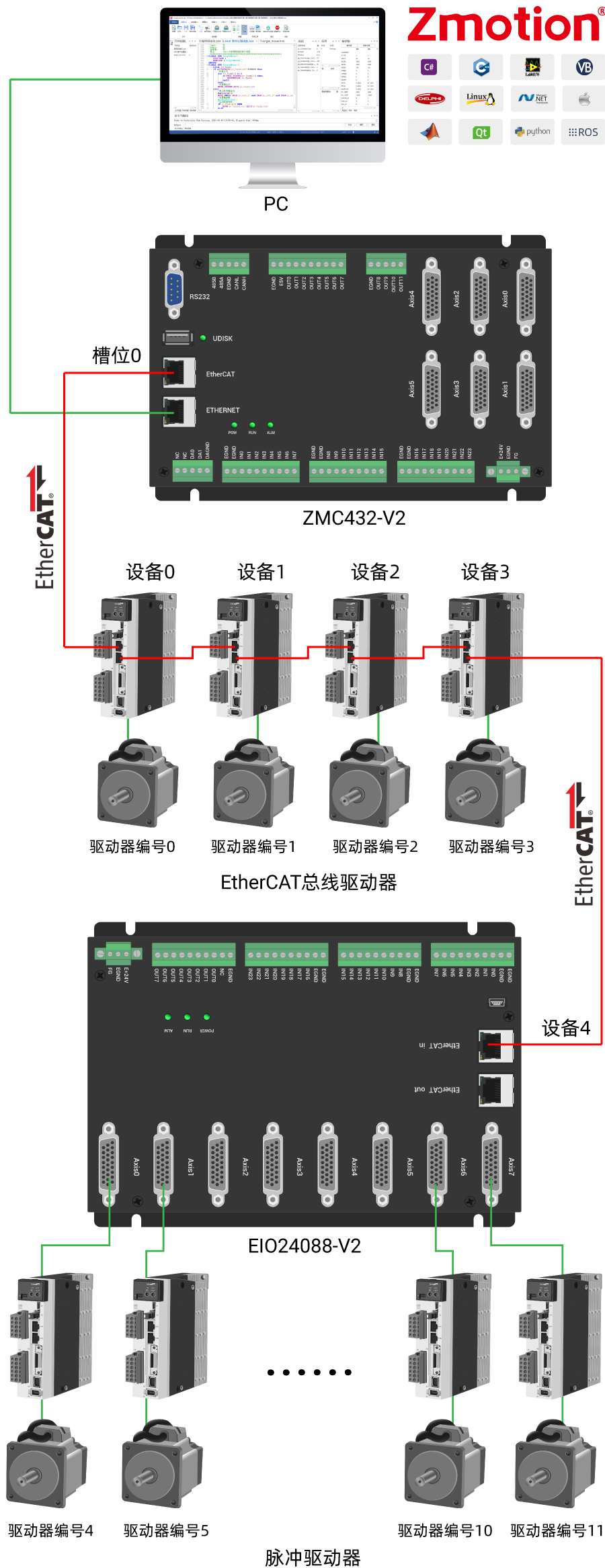
應(yīng)用框圖如下所示:
EIO16084擴(kuò)展模塊硬件介紹
EIO16084總線擴(kuò)展模塊是EtherCAT總線控制器使用的擴(kuò)展模塊,當(dāng)數(shù)字IO、脈沖軸資源不夠需要擴(kuò)展增加的時候,控制器可通過EtherCAT總線連接多個EtherCAT擴(kuò)展模塊進(jìn)行擴(kuò)展。控制器可通過映射編號直接訪問EIO16084的IO資源和軸資源。

支持4個脈沖軸擴(kuò)展;
支持?jǐn)U展16路數(shù)字量輸入和8路數(shù)字量輸出,每個脈沖軸另外各有2路數(shù)字量輸入和2路數(shù)字量輸入可供配置;
脈沖輸出模式為方向/脈沖或雙脈沖;
每軸最大輸出脈沖頻率10MHz;
脈沖軸以外的輸出口最大輸出電流達(dá)300mA,可直接驅(qū)動部分電磁閥。
應(yīng)用框圖如下所示:
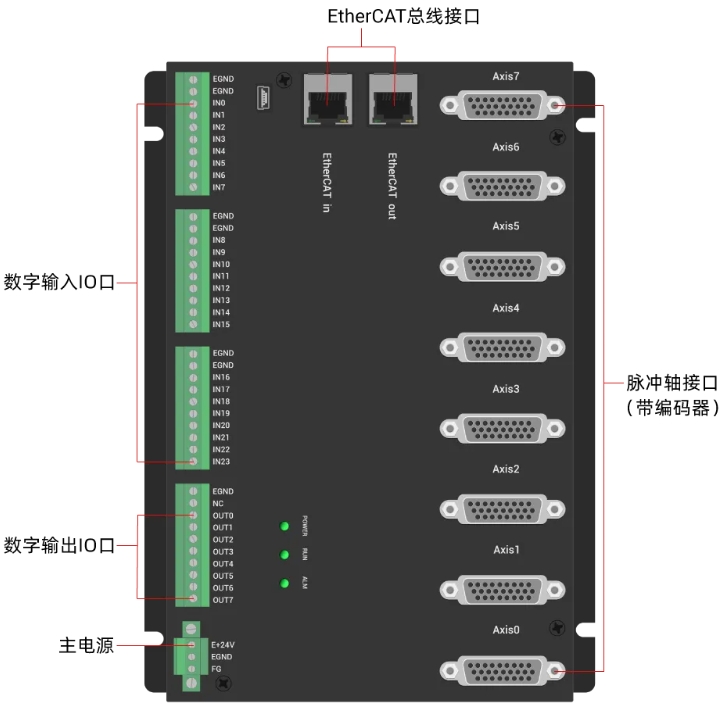
一、接口說明
1、EtherCAT總線通訊接口的接線
EIO24088-V2帶兩個EtherCAT總線接口,接線時注意EtherCAT IN連接主控制器或上級模塊,EtherCAT OUT連接下一級擴(kuò)展板,IN和OUT口不可混用。
2、通用輸入口
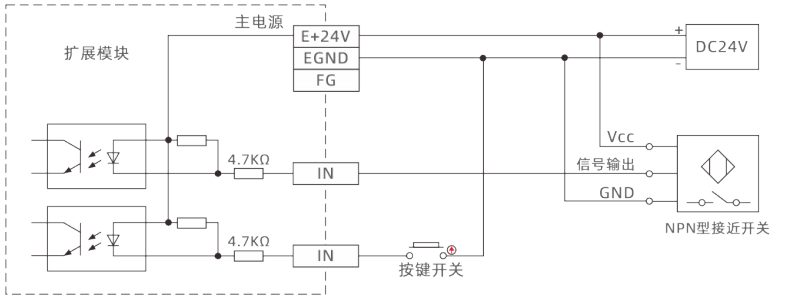
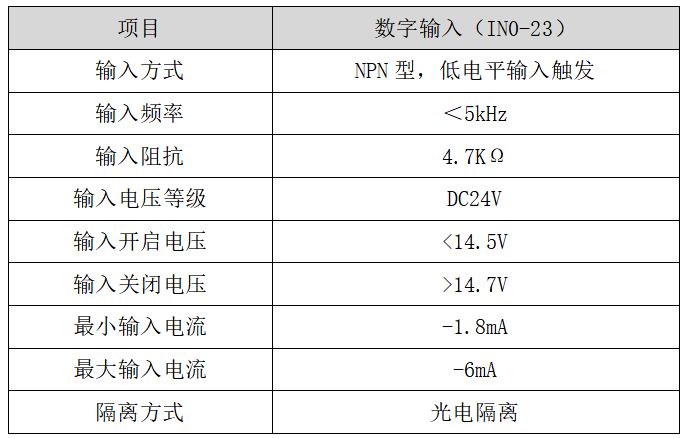
EIO24088-V2帶24個通用輸入口,輸入口需要先使用NODE_IO指令配置IO地址編號才能通過控制器端操作。通用輸入口IN的內(nèi)部電路參考圖如下,輸入口參數(shù)參見下表。
通用輸入口IN的內(nèi)部電路參考圖:
輸入口參數(shù)說明:
3、通用輸出口
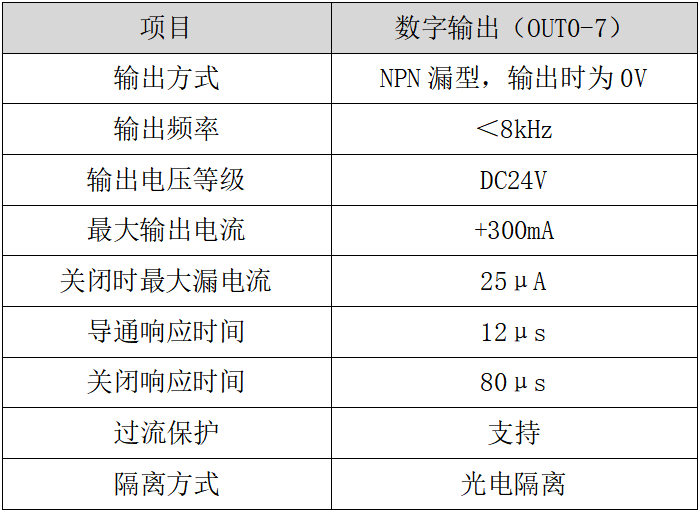
EIO24088-V2帶8個通用輸出口,輸出口需要先使用NODE_IO指令配置IO地址編號后才能通過控制器端操作(NODE_IO指令使用一次便可配置好輸入和輸出)。通用輸出口OUT的內(nèi)部電路參考圖如下,輸出口參數(shù)參見下表。
通用輸出口OUT的內(nèi)部電路參考圖:
輸出口參數(shù)說明:
4、軸接口
EIO24088-V2的軸接口有8個,采用DB26針腳,軸接口包含差分脈沖輸入信號和差分編碼器輸入信號,同時有一路通用輸入口和一路通用輸出口(EIO16084有兩路通用輸入口和兩路通用輸出信號)。
針腳定義說明:
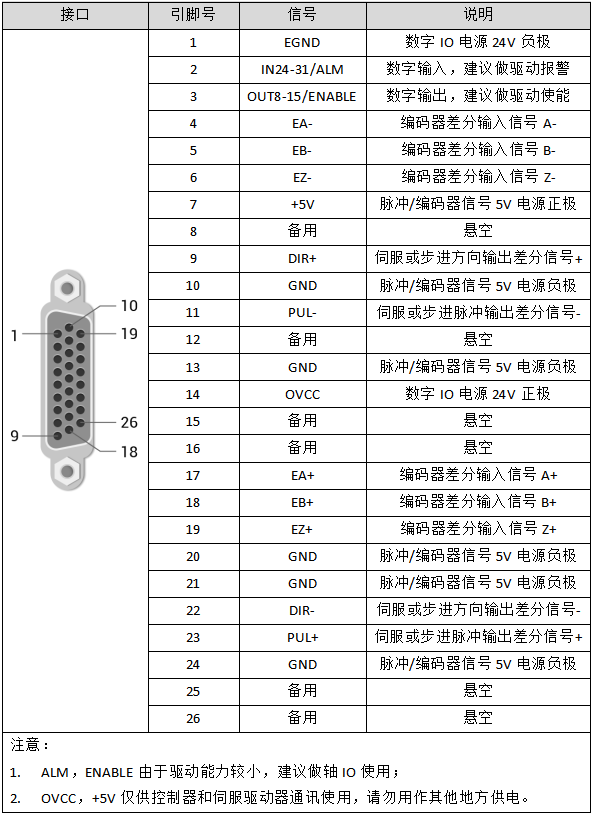
可以通過數(shù)據(jù)字典中的6013h配置EIO擴(kuò)展板直接使能與告警,缺省不使用,需要主控制器來操作。
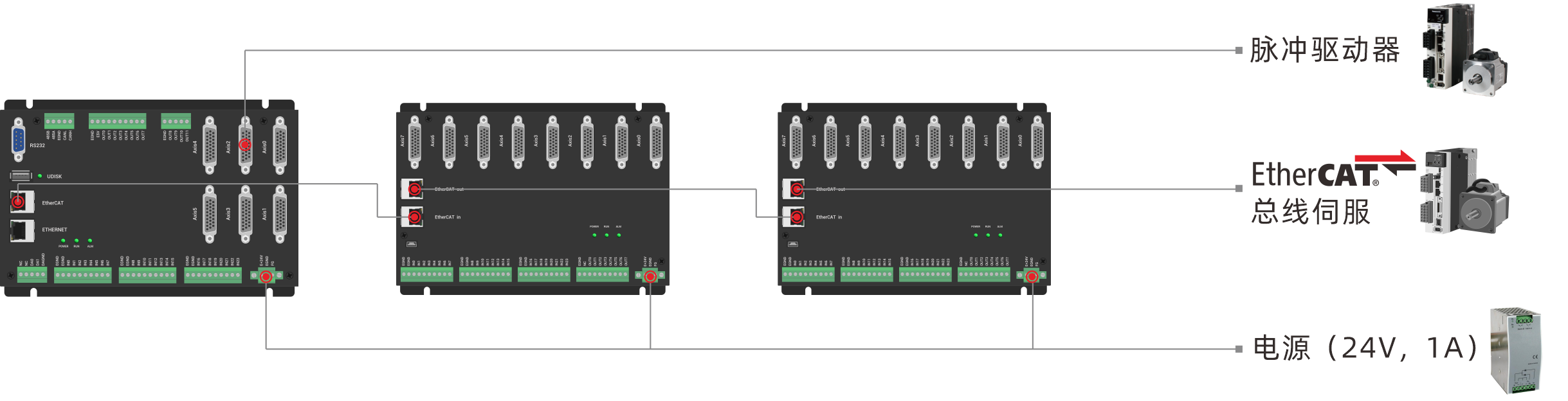
二、總線接線參考
EIO24088-V2擴(kuò)展模塊接線規(guī)則:EIO24088-V2可接到EtherCAT總線上的任意節(jié)點(diǎn)。
EIO24088-V2為總線上的一個設(shè)備節(jié)點(diǎn),可接入8個脈沖型驅(qū)動器,驅(qū)動器按照AXIS 0到AXIS 7的順序依次編號,并且遵從總線上的驅(qū)動器編號規(guī)則,需要進(jìn)行軸映射。
驅(qū)動器的使能信號為脈沖接口內(nèi)的通用輸出口,直接通過主控制器的OP指令來使能,或使用SDO指令配置數(shù)據(jù)字典6013h中的BIT8為1后為即可自動使能,主控制器無法直接控制對應(yīng)的輸出口來使能,只需WDOG置1及對應(yīng)軸的AXIS_ENABLE置1即可。
注意:軸擴(kuò)展模塊的使用個數(shù)不是無限制的,參考控制器可擴(kuò)展的最大軸數(shù)。
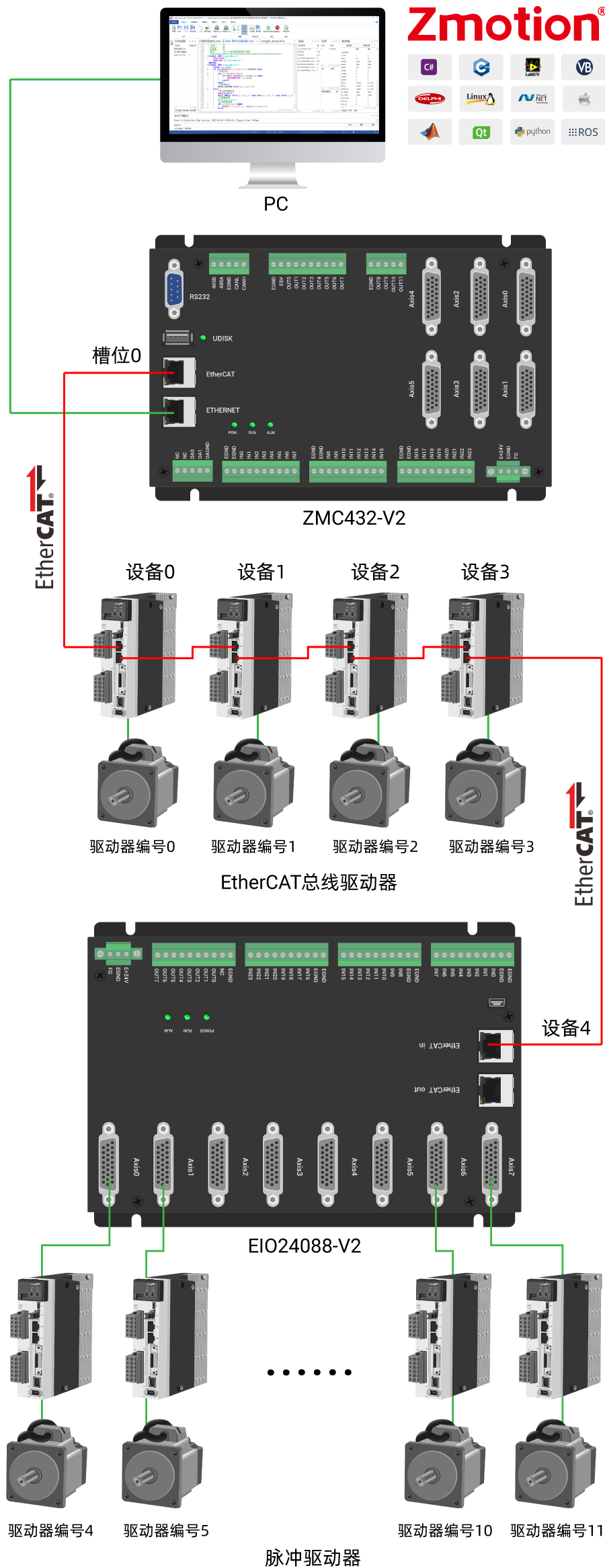
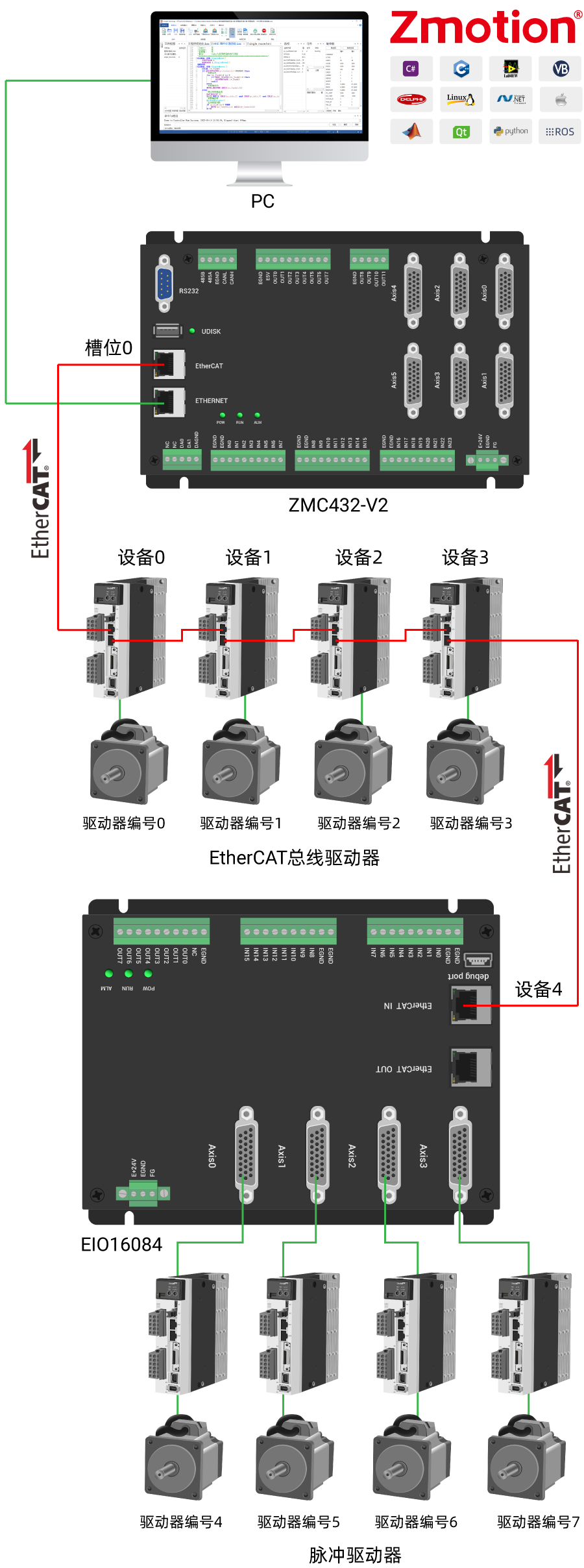
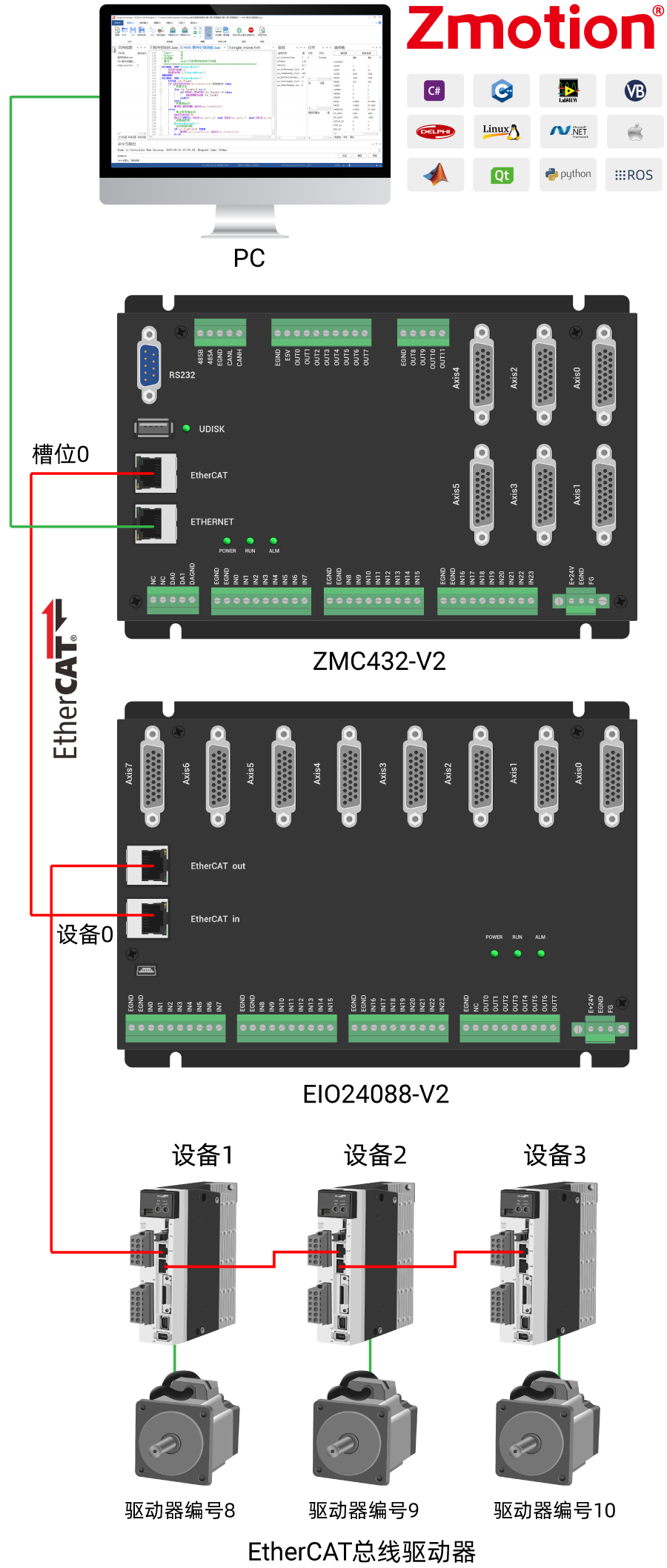
ZMC432-V2本體有6個脈沖軸,通過EtherCAT擴(kuò)展了節(jié)點(diǎn)0、1、2、3四個總線軸,節(jié)點(diǎn)4八個總線轉(zhuǎn)脈沖軸。擴(kuò)展軸上的AXIS0-7(對應(yīng)下圖中驅(qū)動器編號4-11)分別手動映射為軸號10-17。控制器、EIO擴(kuò)展模塊和驅(qū)動器的接線參考如下圖:
涉及的總線相關(guān)指令參數(shù)概念如下:
1、槽位號(slot)
槽位號是指控制器上總線接口的編號,缺省為0。當(dāng)控制器上有多個總線接口時,在線命令發(fā)送?*SLOT查看。
運(yùn)動控制器支持單總線時,槽位號為0。
支持雙總線時,EtherCAT總線槽位號為0,RTEX總線槽位號為1。
2、設(shè)備號(node)
設(shè)備號是指一個槽位上連接的所有設(shè)備的編號,從0開始,按設(shè)備在總線上的連接順序自動編號,可以通過NODE_COUNT(slot)指令查看總線上連接的設(shè)備總數(shù)。
3、驅(qū)動器編號
控制器會自動識別出槽位上的驅(qū)動器,編號從0開始,按驅(qū)動器在總線上的連接順序自動編號。
驅(qū)動器編號與設(shè)備號不同,只給槽位上的驅(qū)動器設(shè)備編號,其他設(shè)備忽略。
三、擴(kuò)展資源映射方法
EIO24088-V2或EIO16084擴(kuò)展模塊上有兩類資源需要映射,軸資源和IO資源。
1、IO映射
控制器上程序只需通過IO編號就可以訪問到擴(kuò)展模塊上的資源,EtherCAT總線擴(kuò)展模塊IO編號通過總線指令NODE_IO來設(shè)置,同時配置輸入和輸出。IO映射時先查看控制器自身的最大IO編號(包括外部IO接口和脈沖軸內(nèi)的接口),再使用指令設(shè)置。若擴(kuò)展的IO與控制器自身IO編號重合,二者將同時起作用,所以IO映射的映射的編號在整個控制系統(tǒng)中均不得重復(fù)。
IO映射語法:
NODE_IO(slot,node)=iobase
slot:槽位號,0-缺省
node:設(shè)備編號,編號從0開始
iobase:映射IO起始編號,設(shè)置結(jié)果只會是8的倍數(shù)
示例:
NODE_IO(0,0)=32'設(shè)置槽位0接口設(shè)備0的IO起始編號為32
若設(shè)備0為EIO24088-V2,按如上語法配置后,起始編號映射為32,該擴(kuò)展模塊上的輸入編號為外部自帶的24點(diǎn)+軸接口通用輸入8點(diǎn),一共32點(diǎn),范圍32-63,輸出編號為外部的8點(diǎn)+軸接口通用輸出8點(diǎn),共16點(diǎn),范圍32-47。
2、軸映射
擴(kuò)展模塊的軸使用前需要使用“AXIS_ADDRESS”指令映射軸號,軸映射也需要注意整個系統(tǒng)的軸號不得重復(fù)。EIO系列擴(kuò)展軸的映射與總線驅(qū)動器的軸映射語法相同。軸映射語法:
AXIS_ADDRESS(軸號)=(槽位號<<16)+驅(qū)動器編號+1
示例:
AXIS_ADDRESS(0)=(0
若第一個節(jié)點(diǎn)是EIO24088-V2,那么這里的驅(qū)動器編號0對應(yīng)連接在EIO24088-V2上的第一個總線轉(zhuǎn)脈沖型驅(qū)動器。
四、總線初始化
EIO24088-V2擴(kuò)展模塊需要經(jīng)過總線初始化之后才能使用,下圖為總線初始化流程。
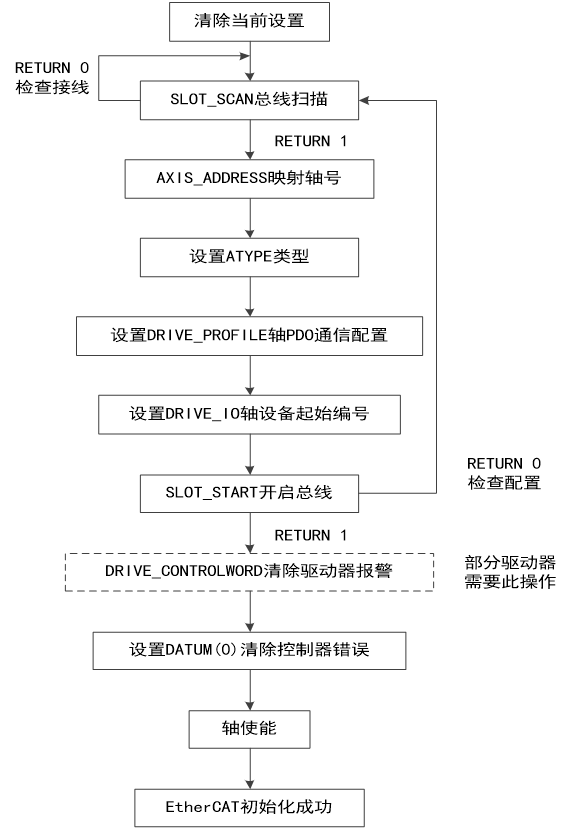
進(jìn)行總線初始化有兩種方式:
? 通過正運(yùn)動提供的總線初始化腳本進(jìn)行初始化
? 找到RTSys的工程設(shè)置,打開啟動軸配置及EtherCAT配置自行配置
先給大家介紹的是第一種通過總線初始化腳本進(jìn)行總線初始化,此初始化程序可用來初始化EtherCAT驅(qū)動器和EtherCAT總線擴(kuò)展模塊,建立通訊連接(通用模板,適用于多種品牌的驅(qū)動器),可找正運(yùn)動廠商提供。
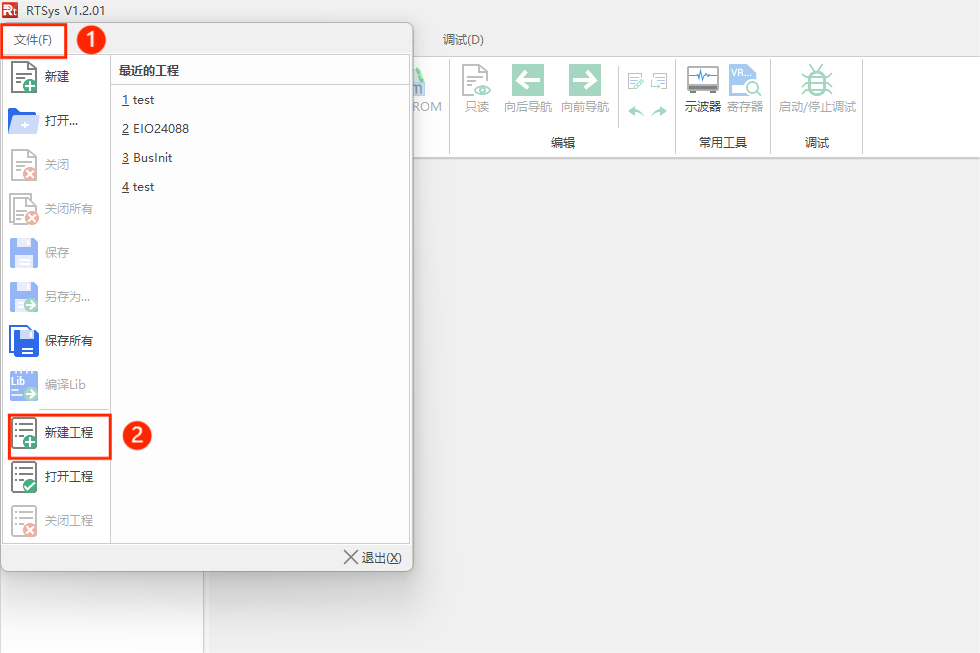
1、在RTSys或ZDevelop中新建一個工程
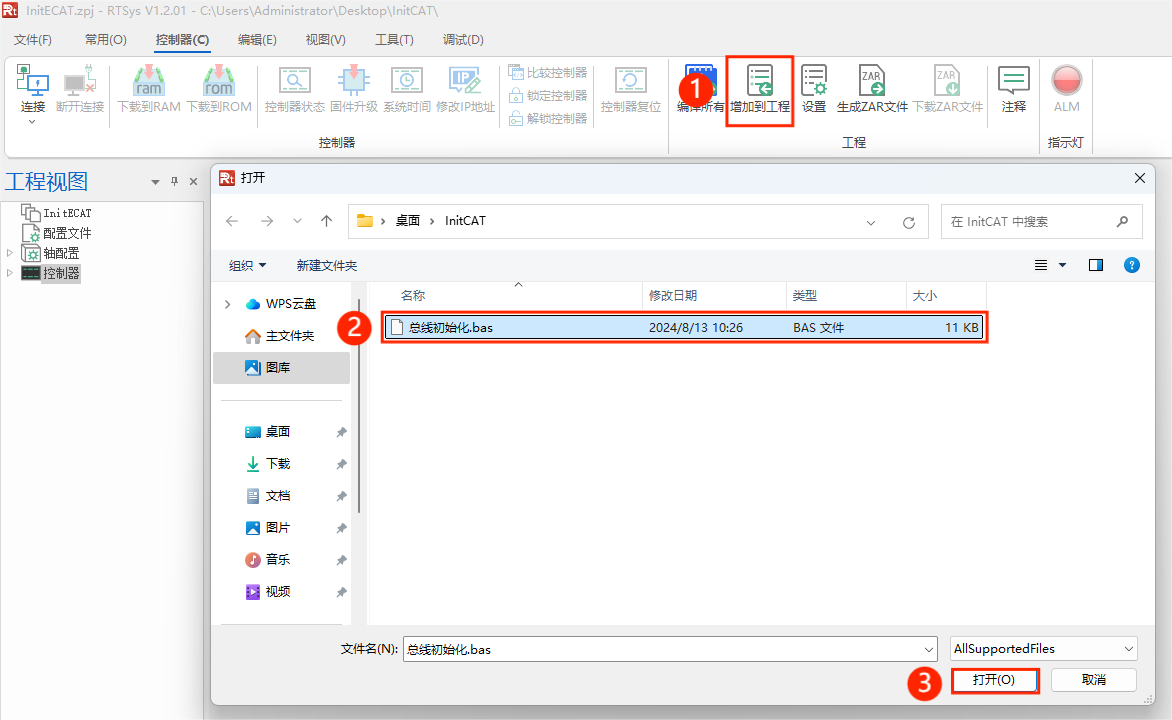
2、把總線初始化腳本添加至工程
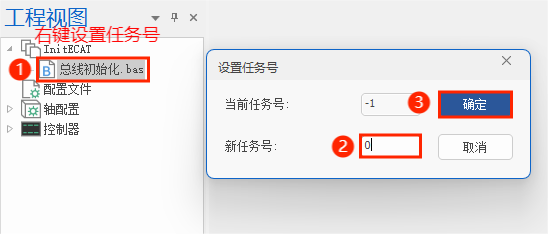
3、設(shè)置初始化腳本的任務(wù)號
4、設(shè)置本地脈沖軸數(shù)和起始編號及總線軸的起始編號,不使用本地脈沖軸只使用總線軸可使用默認(rèn)配置(可根據(jù)實(shí)際使用情況修改參數(shù)),演示時使用了六個本地脈沖軸,ECAT總線連接了一個EIO24088-V2及兩個松下的驅(qū)動器及一個臺達(dá)的驅(qū)動器。
5、總線初始化模板程序:
'控制器最大軸數(shù) TABLE(0)= SYS_ZFEATURE(0) GLOBAL CONST ControlMaxAxis = TABLE(0) '支持電機(jī)個數(shù) TABLE(0)= SYS_ZFEATURE(1) GLOBAL CONST RealAxisMax = TABLE(0) '槽位號,(單總線控制器缺省0,具體查看硬件手冊) GLOBALCONSTBus_Slot=0 '本地脈沖軸起始編號 GLOBAL CONST LocalAxis_Start = 11 '本地脈沖軸軸數(shù)量 GLOBALCONSTLocalAxis_Num=2 '總線軸起始編號 GLOBALCONSTBusAxis_Start=0 '總線驅(qū)動器起始IOS GLOBAL CONST BusStaraIoNum=128 '總線初始化狀態(tài) -1--未進(jìn)行 0--初始化錯誤 1--初始化完成 GLOBAL ECAT_InitEnable ECAT_InitEnable = -1 '延遲3秒,等待驅(qū)動器上電,不同驅(qū)動器自身上電時間不同,具體根據(jù)驅(qū)動器調(diào)整延時 DELAY(3000) '? "總線通訊周期:",SERVO_PERIOD,"us" ECAT_Init() '調(diào)用初始化函數(shù) DIM ScanNum '如果沒有掃描到在掃描4次 IF ECAT_InitEnable1 THEN FOR ScanNum=0 to 3 ECAT_Init() '調(diào)用初始化函數(shù) IF ECAT_InitEnable=1 THEN EXIT FOR NEXT ENDIF END '/************************************************************* 'Description: //總線軸初始化 'Input: // 'Input: // 'Input: // 'Output: // ECAT_InitEnable=ON -->初始化完成標(biāo)志 'Return: // '*************************************************************/ GLOBAL SUB ECAT_Init() LOCAL NodeSum_Num ,BusAxis_Num ,NodeAxis_Num '設(shè)備總數(shù)、總線軸總數(shù)、每個節(jié)點(diǎn)上的電機(jī)數(shù) LOCAL Drive_Vender,Drive_Device,Drive_Alias '驅(qū)動廠商編號、驅(qū)動設(shè)備編號、驅(qū)動設(shè)備撥碼ID local i,j ? "總線通訊周期:",SERVO_PERIOD,"us" RAPIDSTOP(2) '初始化還原軸類型 FOR i = 0 TO ControlMaxAxis - 1 AXIS_ADDRESS(i) = 0 AXIS_ENABLE(i) = 0 ATYPE(i) = 0 WAIT IDLE(i) NEXT '本地軸重新映射 FOR i=0 TO LocalAxis_Num -1 AXIS_ADDRESS(LocalAxis_Start+i)= (-1i映射到軸20-->20+i ATYPE(LocalAxis_Start+i)=0 '軸類型 NEXT ECAT_InitEnable = -1 SYSTEM_ZSET = SYSTEM_ZSET OR 128 '掃描總線驅(qū)動器 FOR i=0 to 3 SLOT_STOP(Bus_Slot) DELAY(200) SLOT_SCAN(Bus_Slot) IF NODE_COUNT(Bus_Slot) THEN EXIT FOR DELAY(1000) NEXT IF RETURN THEN NodeSum_Num = NODE_COUNT(Bus_Slot) ? "總線掃描成功,連接設(shè)備數(shù):",NodeSum_Num '總線軸總數(shù),從0開始計數(shù) BusAxis_Num = 0 FOR i = 0 TO NodeSum_Num - 1 NodeAxis_Num = NODE_AXIS_COUNT(Bus_Slot,i) '讀取設(shè)備電機(jī)數(shù) Drive_Vender = NODE_INFO(Bus_Slot,i,0) '讀取驅(qū)動器廠商 Drive_Device = NODE_INFO(Bus_Slot,i,1) '讀取設(shè)備編號 Drive_Alias = NODE_INFO(Bus_Slot,i,3) '讀取設(shè)備撥碼ID '軸設(shè)置 FOR j = 0 TO NodeAxis_Num - 1 AXIS_ADDRESS(BusAxis_Num+BusAxis_Start) = BusAxis_Num + 1 '映射軸號 ATYPE(BusAxis_Num+BusAxis_Start) = 65 '設(shè)置控制模式 65-位置 66-速度 67-轉(zhuǎn)矩 詳細(xì)參照AXISSTATUS DRIVE_PROFILE(BusAxis_Num+BusAxis_Start) = 0 '驅(qū)動器PDO設(shè)置,驅(qū)動器默認(rèn)設(shè)置-- -1 位置模式--0 速度模式--20+ 力矩模式--30+ DISABLE_GROUP(BusAxis_Num+BusAxis_Start) '每軸單獨(dú)分組 IF DRIVE_PROFILE(BusAxis_Num+BusAxis_Start)=4 OR DRIVE_PROFILE(BusAxis_Num+BusAxis_Start)=5 THEN '設(shè)置總線驅(qū)動器的起始IO地址 DRIVE_IO (BusAxis_Num+BusAxis_Start) = BusStaraIoNum+8*(BusAxis_Num+BusAxis_Start) '設(shè)置負(fù)限位 REV_IN(BusAxis_Num+BusAxis_Start) = DRIVE_IO (BusAxis_Num+BusAxis_Start) INVERT_IN(DRIVE_IO (BusAxis_Num+BusAxis_Start),ON) '設(shè)置正限位 FWD_IN(BusAxis_Num+BusAxis_Start) = DRIVE_IO (BusAxis_Num+BusAxis_Start)+1 INVERT_IN(DRIVE_IO (BusAxis_Num+BusAxis_Start)+1,ON) '設(shè)置原點(diǎn) DATUM_IN(BusAxis_Num+BusAxis_Start) = DRIVE_IO (BusAxis_Num+BusAxis_Start)+2 INVERT_IN(DRIVE_IO (BusAxis_Num+BusAxis_Start)+2,ON) ELSEIF DRIVE_PROFILE(BusAxis_Num+BusAxis_Start)=BusStaraIoNum THEN '取消設(shè)置負(fù)限位 REV_IN(BusAxis_Num+BusAxis_Start) = -1 ENDIF IF FWD_IN(BusAxis_Num+BusAxis_Start)>=BusStaraIoNum THEN '取消設(shè)置正限位 FWD_IN(BusAxis_Num+BusAxis_Start) = -1 ENDIF IF DATUM_IN(BusAxis_Num+BusAxis_Start)>=BusStaraIoNum THEN '取消設(shè)置原點(diǎn) DATUM_IN(BusAxis_Num+BusAxis_Start) = -1 ENDIF ENDIF BusAxis_Num = BusAxis_Num + 1 '總線軸計數(shù)+1 NEXT '正運(yùn)動EIO24088-V2總線轉(zhuǎn)脈沖擴(kuò)展軸 IF Drive_Vender = $41B AND Drive_Device = $1ab0 THEN local k for k=0 to 7 SDO_WRITE(Bus_Slot,i,$6011+k*$800,0,5,7) '設(shè)置擴(kuò)展脈沖軸ATYPE類型 SDO_WRITE(Bus_Slot,i,$6012+k*$800,0,6,0) '設(shè)置擴(kuò)展脈沖軸INVERT_STEP脈沖輸出模式 NODE_IO(Bus_Slot,i) = 32 + 32*i '設(shè)置24088上IO的起始映射地址 next ENDIF NEXT ? "軸掃描映射完成,連接總線軸數(shù):",BusAxis_Num DELAY(100) SLOT_START(Bus_Slot) WA(3000) ' 延遲3秒,等待驅(qū)動器時鐘同步,不同驅(qū)動器時間不同,具體根據(jù)驅(qū)動器調(diào)整延時 IF RETURN THEN ? "開始清除驅(qū)動器報警" FOR i = BusAxis_Start TO BusAxis_Start + BusAxis_Num - 1 BASE(i) DRIVE_CLEAR(0) WA(10) DRIVE_CONTROLWORD(i) = 128 ' 伺服錯誤清除 WA(10) DRIVE_CONTROLWORD(i)=6 ' 伺服shutdown WA(10) 'DRIVE_CONTROLWORD(i)=7 ' 伺服disable voltage 'WA(10) DRIVE_CONTROLWORD(i)=15 ' 伺服fault reset WA(10) NEXT DELAY(100) ? "控制器報警清除完成" DATUM(0) ' 清除所有軸的錯誤狀態(tài)。 DELAY(1000) ?"開始伺服使能" WDOG = 1 FOR i = BusAxis_Start TO BusAxis_Start + BusAxis_Num - 1 AXIS_ENABLE(i) = 1 NEXT ?"伺服使能完成" ECAT_InitEnable = 1 ELSE ?"總線開啟失敗" ECAT_InitEnable = 0 ENDIF ELSE ?"總線掃描失敗" ECAT_InitEnable = 0 ENDIF ENDSUB
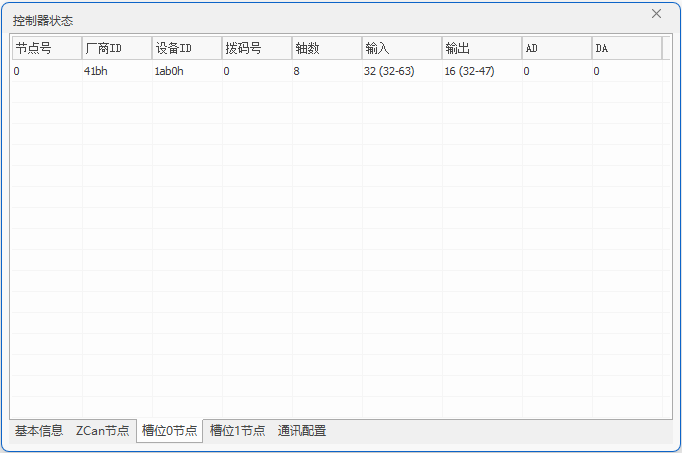
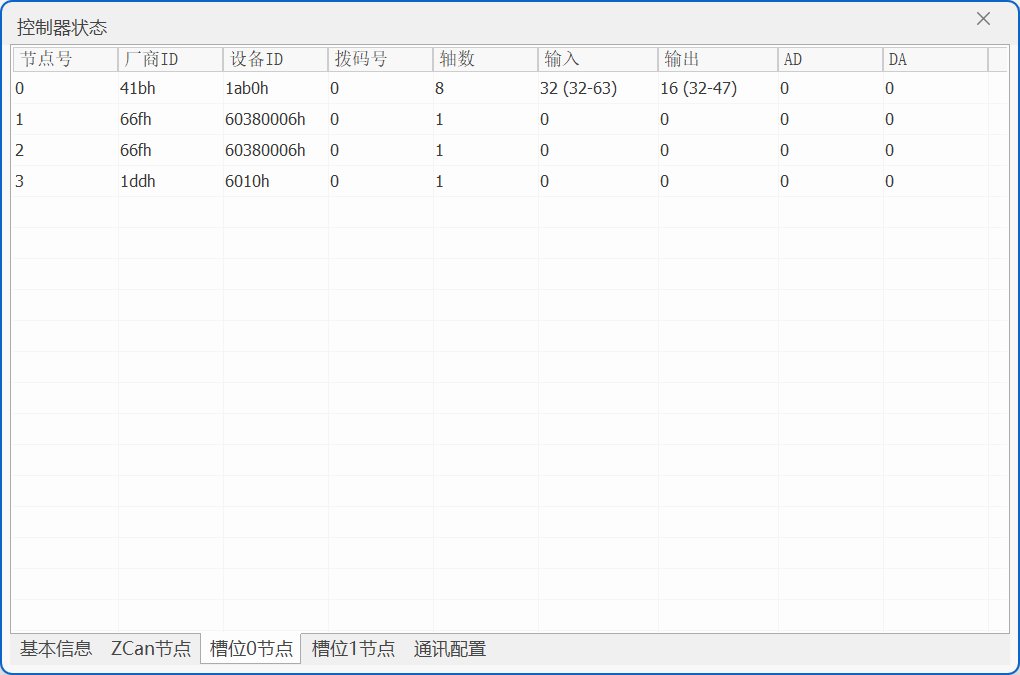
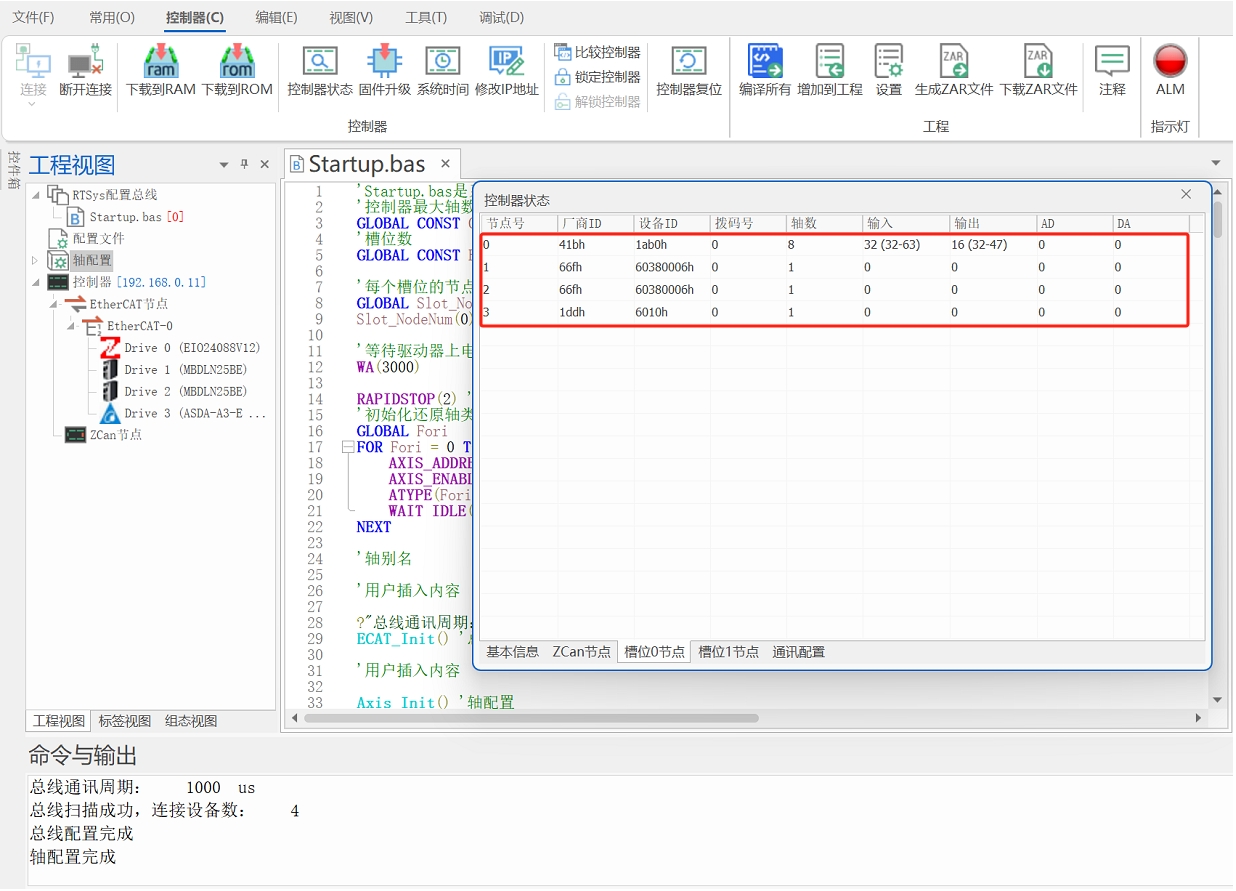
參考配置采用控制器依次連接一個EIO24088-V2擴(kuò)展模塊和兩個松下及一個臺達(dá)的EtherCAT總線驅(qū)動器,采用以上初始化程序,成功建立通訊連接,控制器狀態(tài)窗口顯示當(dāng)前掃描連接的節(jié)點(diǎn)情況。
總線上的主站為控制器,控制器連接的第一個從站設(shè)備為EIO24088-V2擴(kuò)展模塊,第二個、第三個和第四個從站設(shè)備為EtherCAT總線驅(qū)動器,可使用控制器的本地脈沖軸接口。總線上的驅(qū)動設(shè)備映射軸號從0開始,EIO24088-V2擴(kuò)展模塊的AXIS 0-7接口上的脈沖驅(qū)動器映射為軸號0-7,三個EtherCAT總線驅(qū)動器映射為軸號8-10,本地軸從11開始,EIO24088-V2擴(kuò)展模塊的IO編號起始為32。
注意:映射的軸號和IO編號整個控制系統(tǒng)中不得重復(fù),根據(jù)具體情況去選擇編號。
接下來給大家介紹第二種總線初始化配置的方法,通過RTSys的工程設(shè)置自行配置總線初始化腳本。
1、在RTSys中新建一個工程
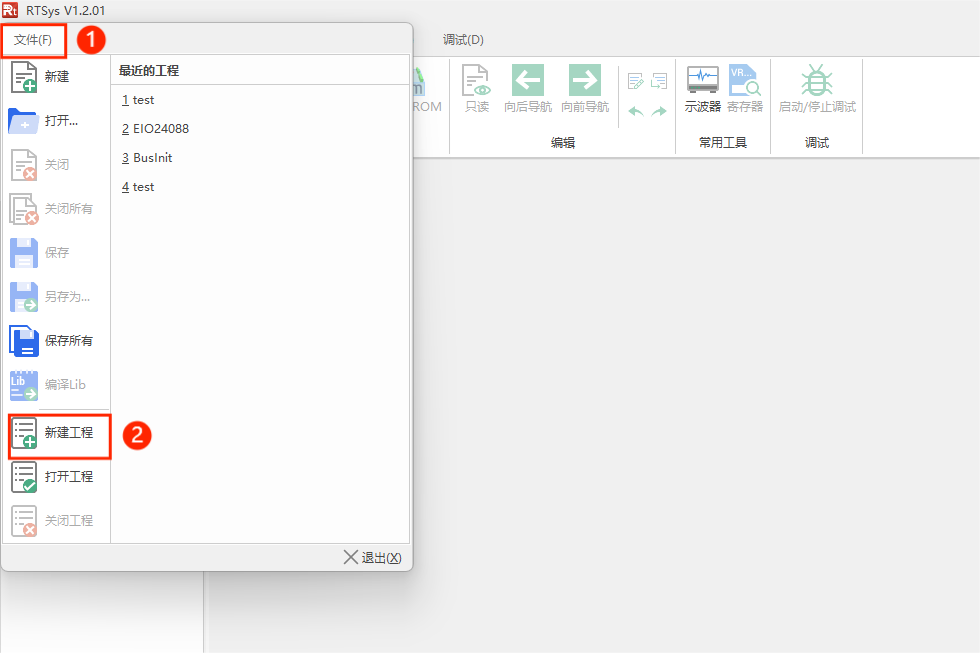
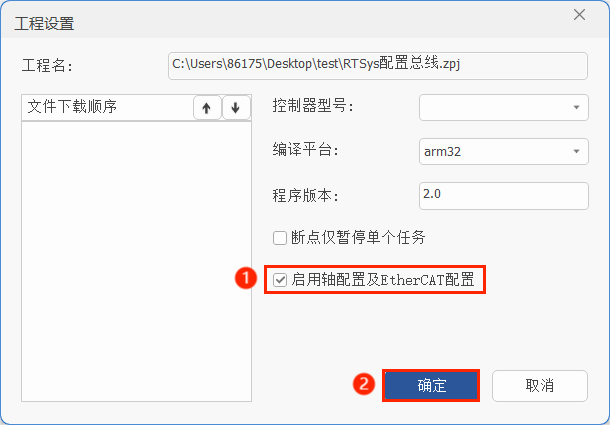
2、打開EtherCAT配置。在工程視圖右鍵選擇工程設(shè)置,勾選軸配置及EtherCAT配置

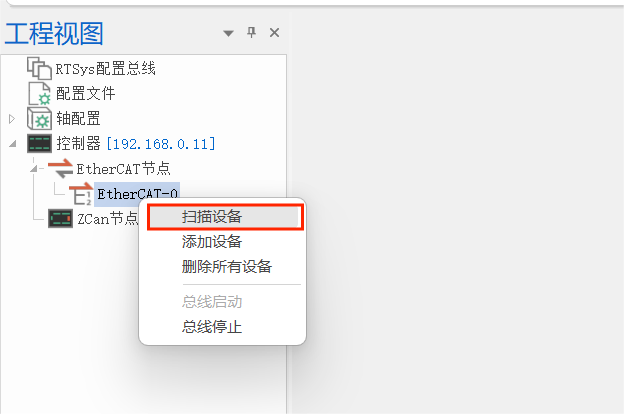
3、掃描出要配置的總線節(jié)點(diǎn)
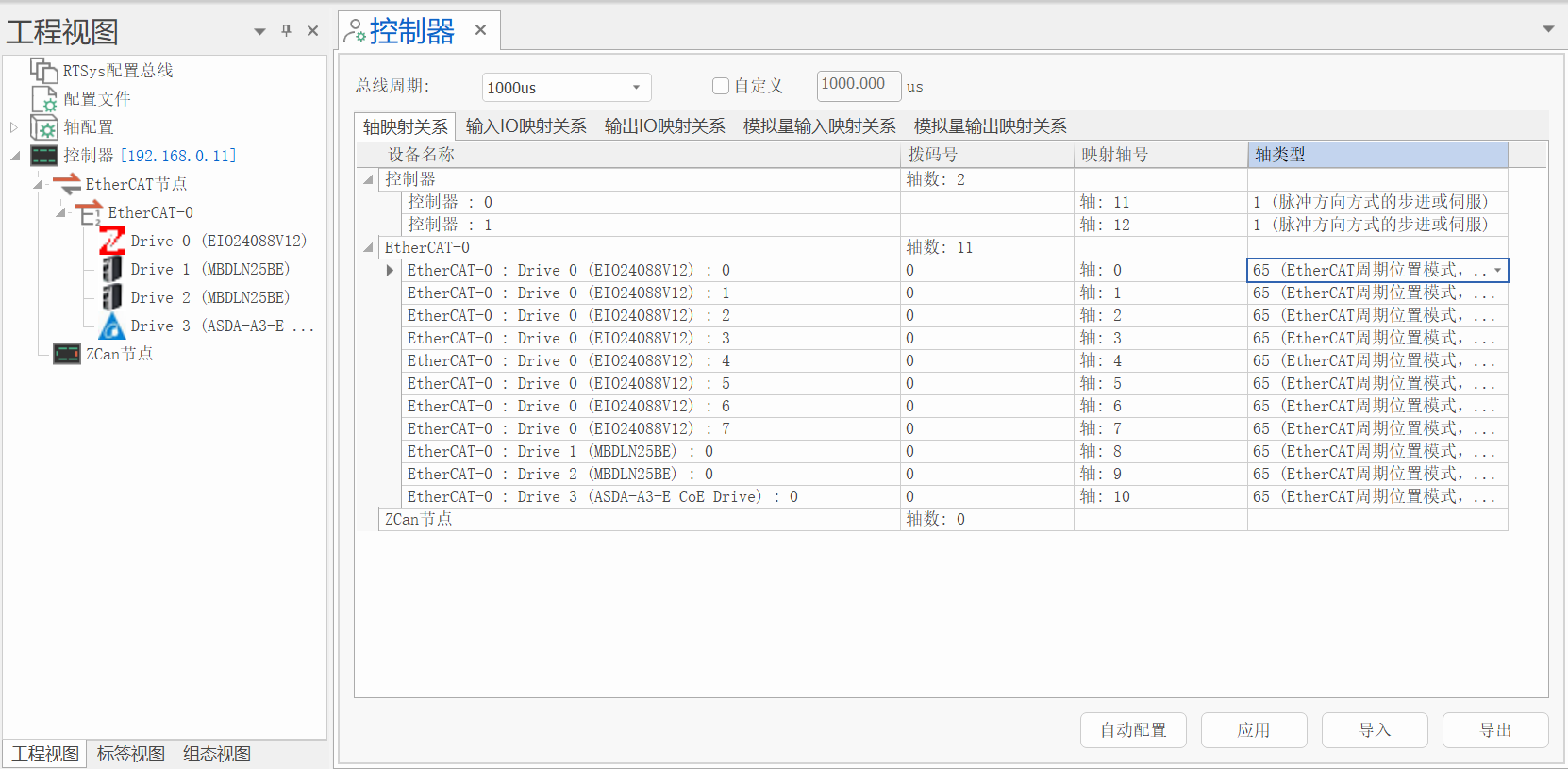
4、自行配置軸號及類型
(1)雙擊控制器打開控制器配置界面;
(2)選擇需要使用的本地脈沖軸數(shù)(此演示選擇兩個本地脈沖軸);
(3)給本地脈沖軸重映射軸號;
(4)選擇本地脈沖軸的軸類型,根據(jù)使用情況自行選擇;
(5)對EtherCAT掃描到的總線軸進(jìn)行軸號映射;
(6)設(shè)置軸類型;
(7)根據(jù)使用情況選擇65/66/67(不同軸類型所需的PDO列表不同);
(8)點(diǎn)擊應(yīng)用自動生成Startup.bas總線配置文件。
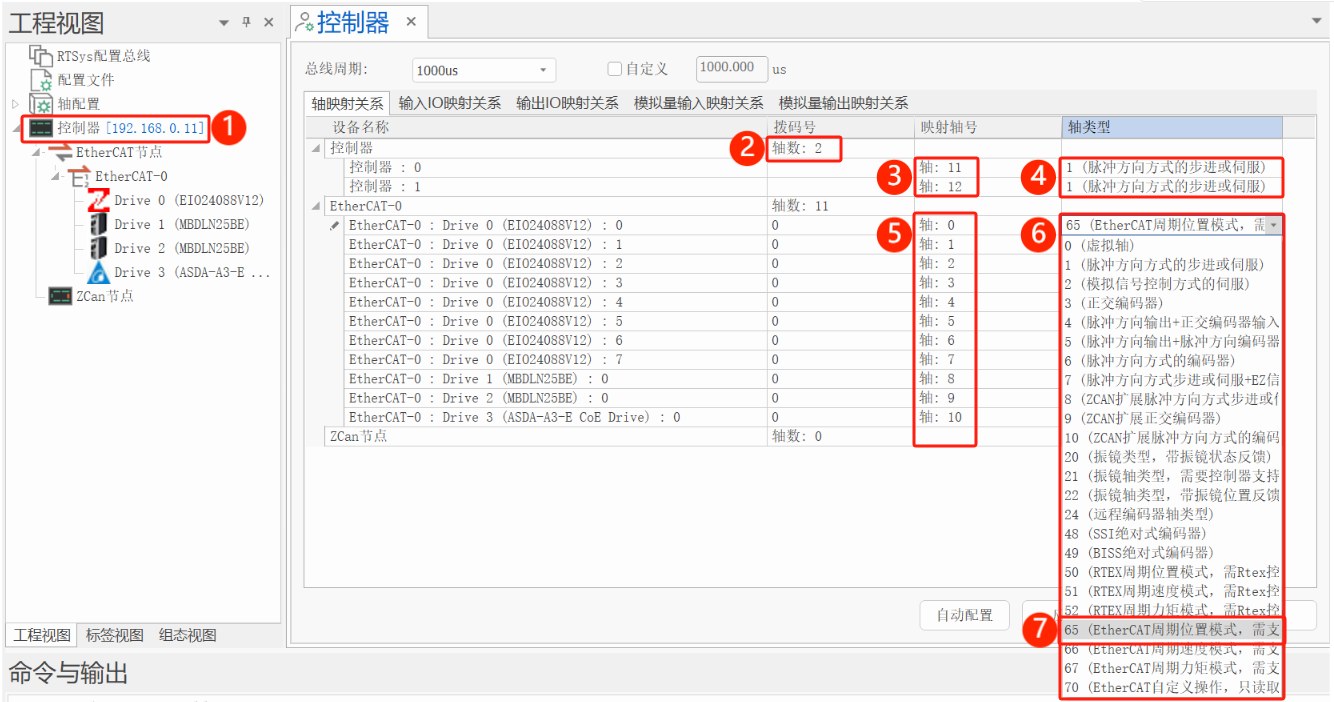
此演示配置了兩個本地脈沖軸(軸號重映射成11,12),EIO24088-V2的八個總線轉(zhuǎn)脈沖軸(軸號映射成0-7),兩個松下總線伺服驅(qū)動器及一個高創(chuàng)總線伺服驅(qū)動器(軸號映射成8-10)。
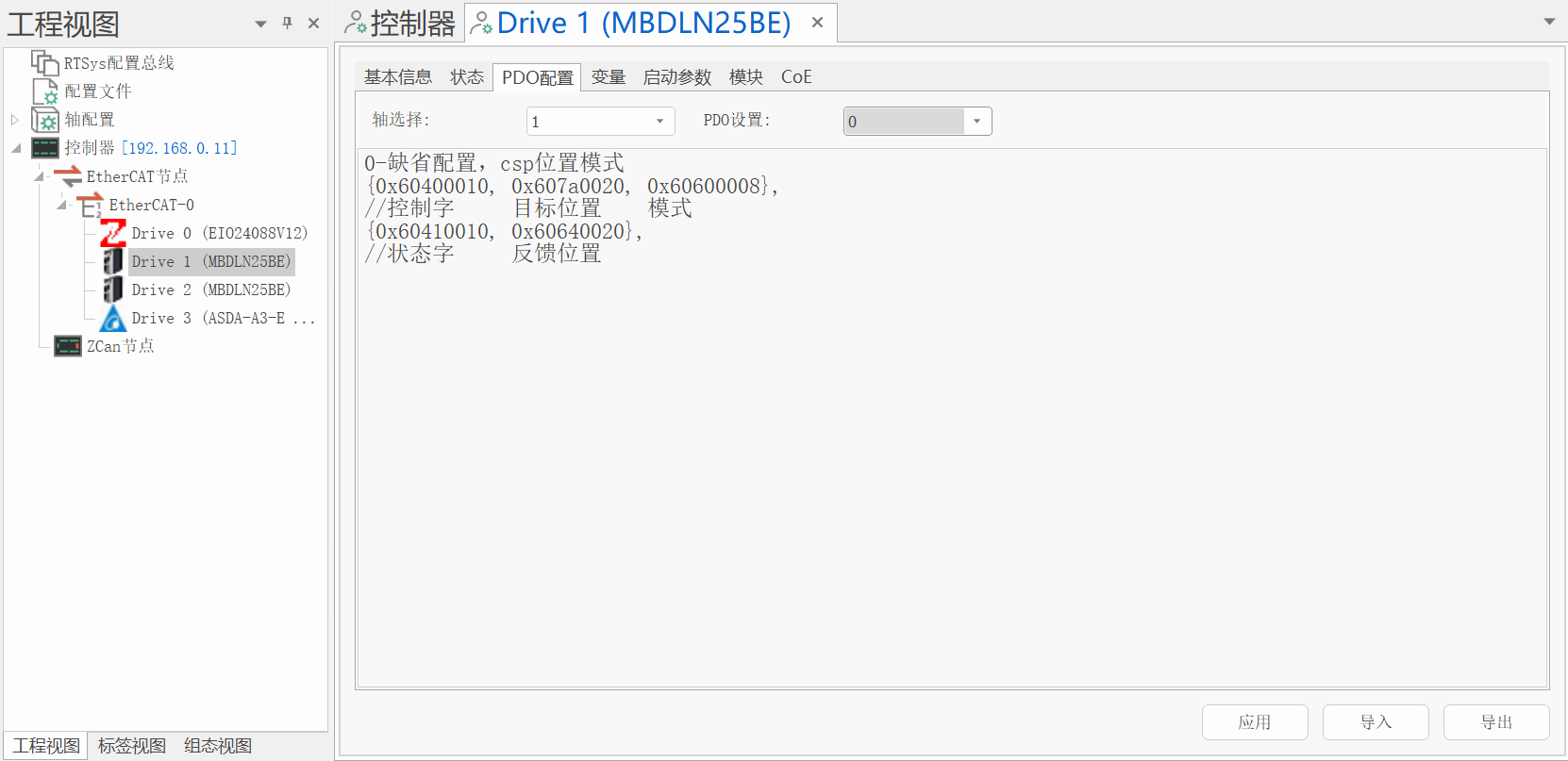
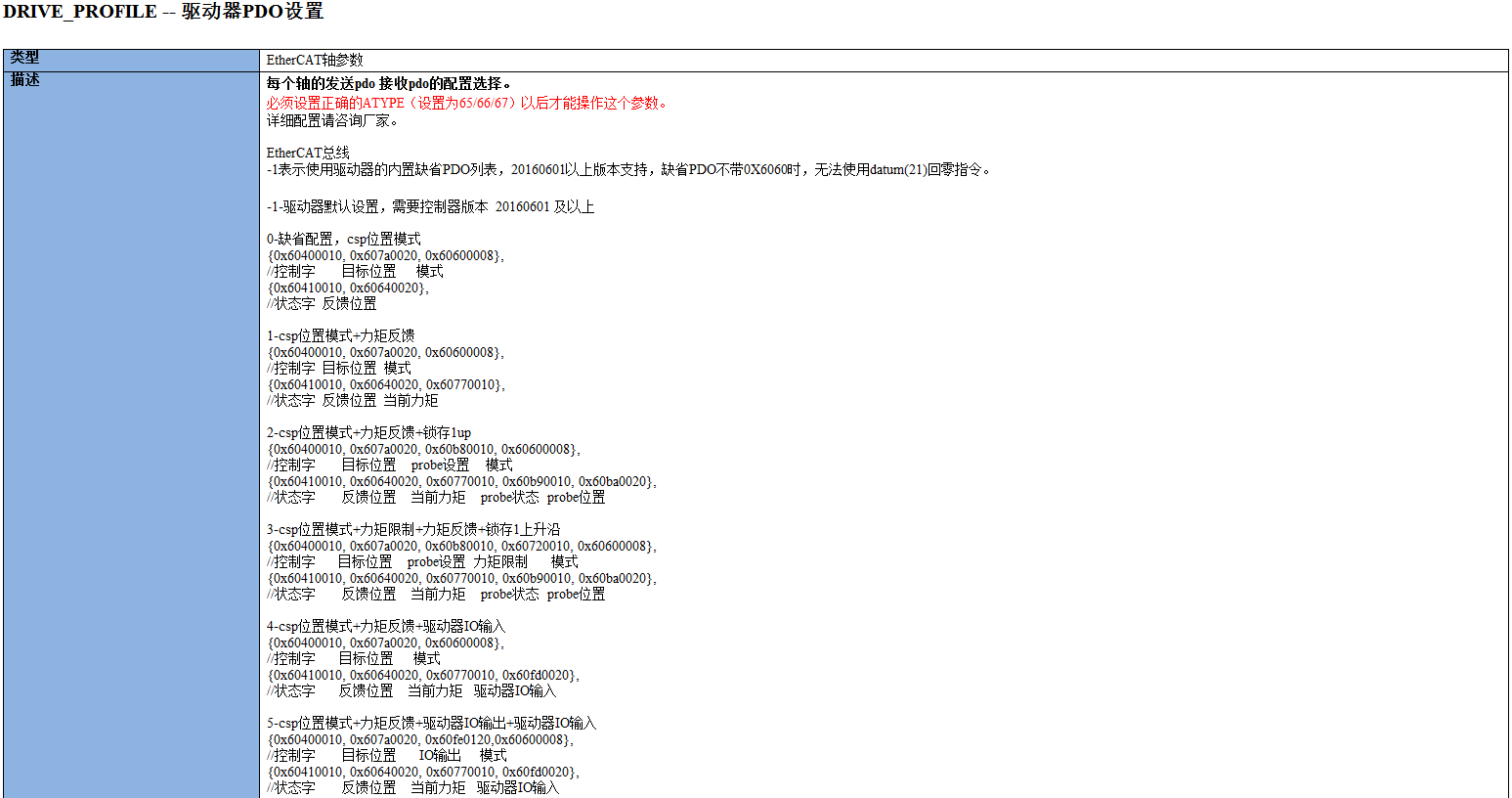
5、進(jìn)行PDO設(shè)置,根據(jù)需求選擇
(1)選擇需要配置的節(jié)點(diǎn)(此演示是選擇EIO24088-V2);
(2)選擇需要配置的軸(八個軸都需要配置);
(3)進(jìn)行PDO設(shè)置(選擇0即可);
(4)所有軸都配置完后點(diǎn)擊應(yīng)用保存配置。

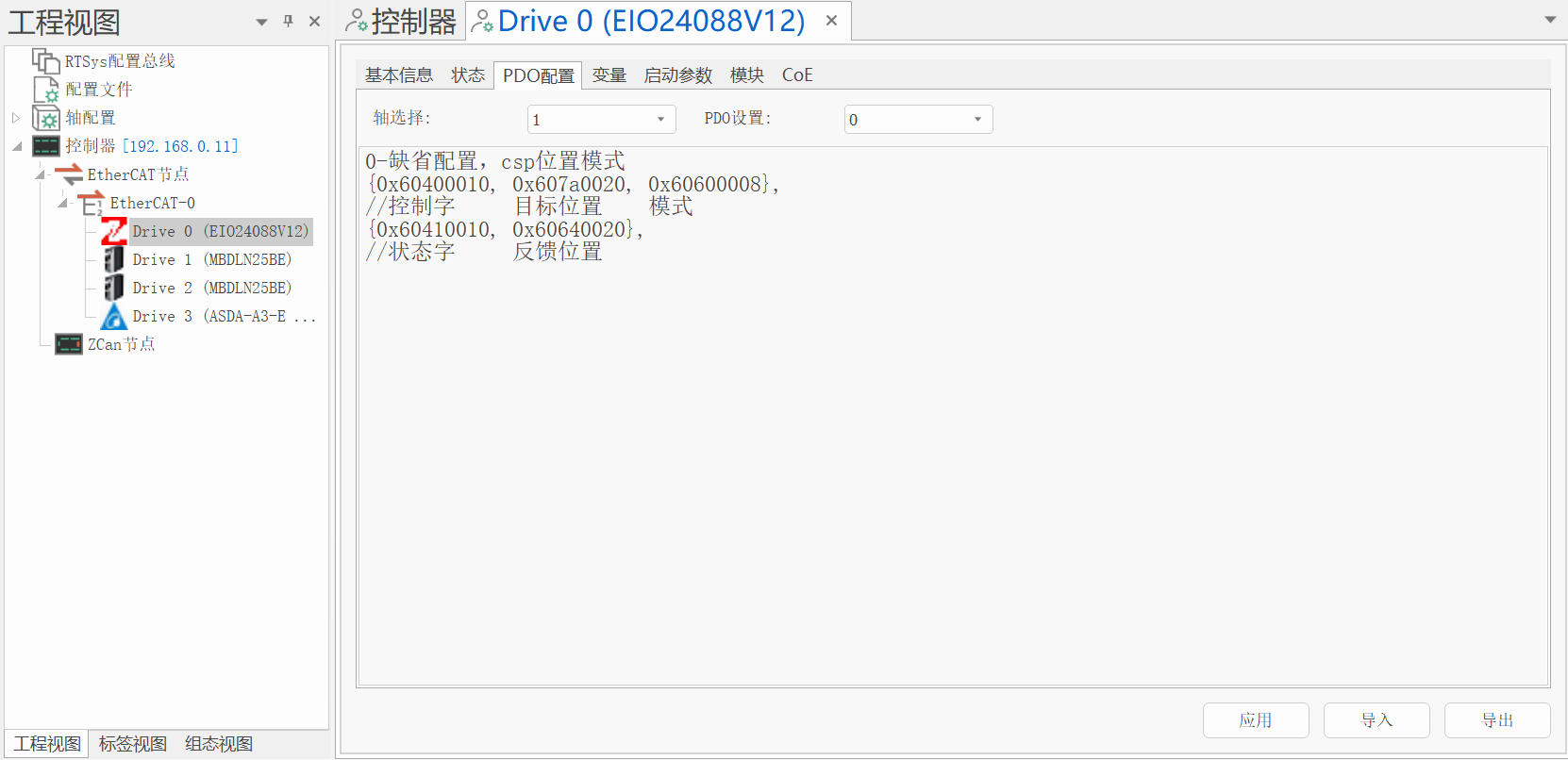
在幫助文檔中可查詢各PDO設(shè)置的數(shù)據(jù)字典詳情,根據(jù)需求自行選擇。
6、把配置好的Startup.bas下載進(jìn)控制器進(jìn)行總線初始化
五、通過RTSys測試擴(kuò)展的資源
1、測試IO資源
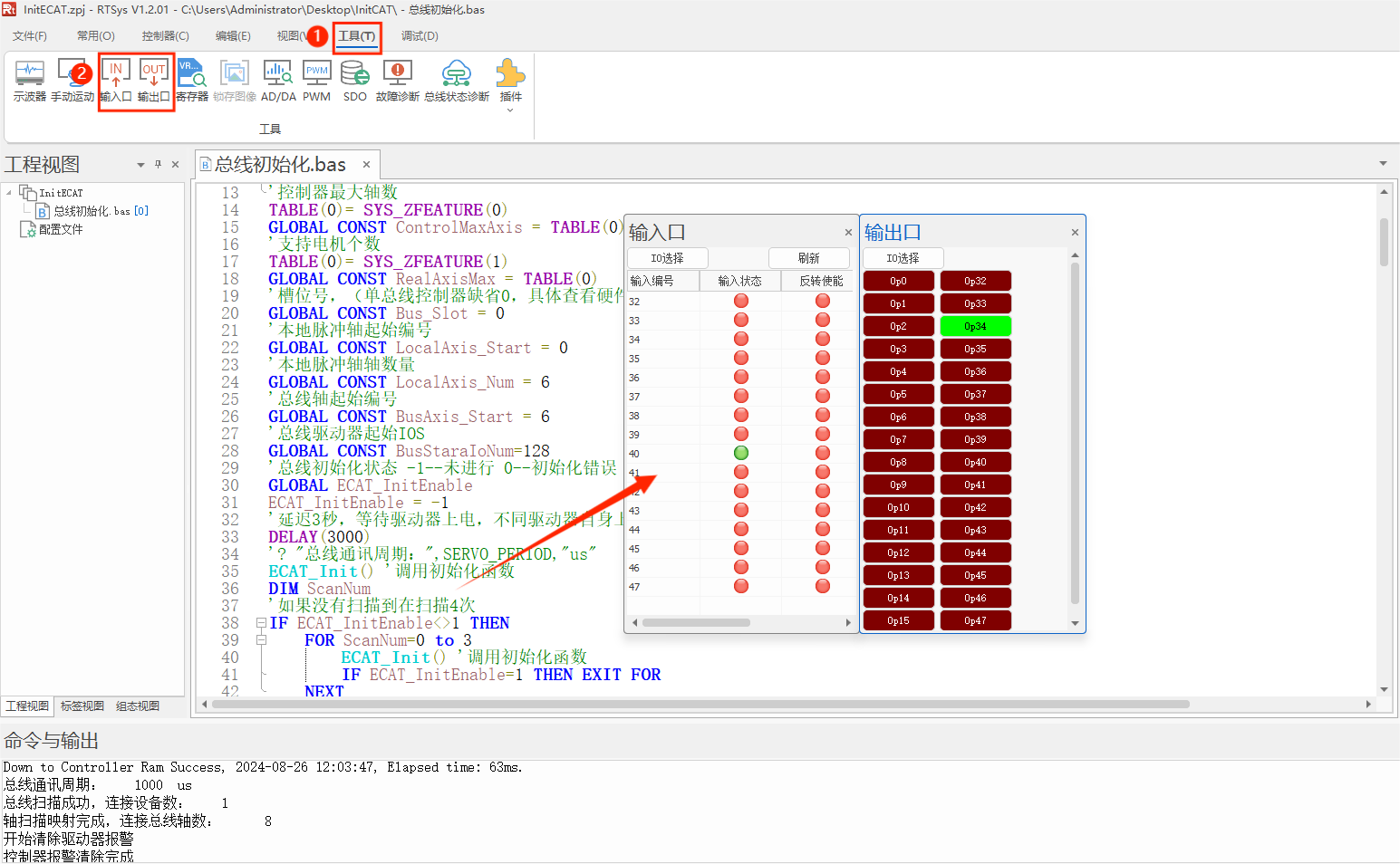
在沒有IO設(shè)備的情況下,我們可以通過OUT和IN端口直接相連判斷IO的響應(yīng)情況,如下圖,測試EIO擴(kuò)展模塊的IO配置,將EIO的OUT2(映射編號34)端子連接到EIO24088-V2的IN8(映射編號40)上,操作OP(34)可見輸入口40收到信號。
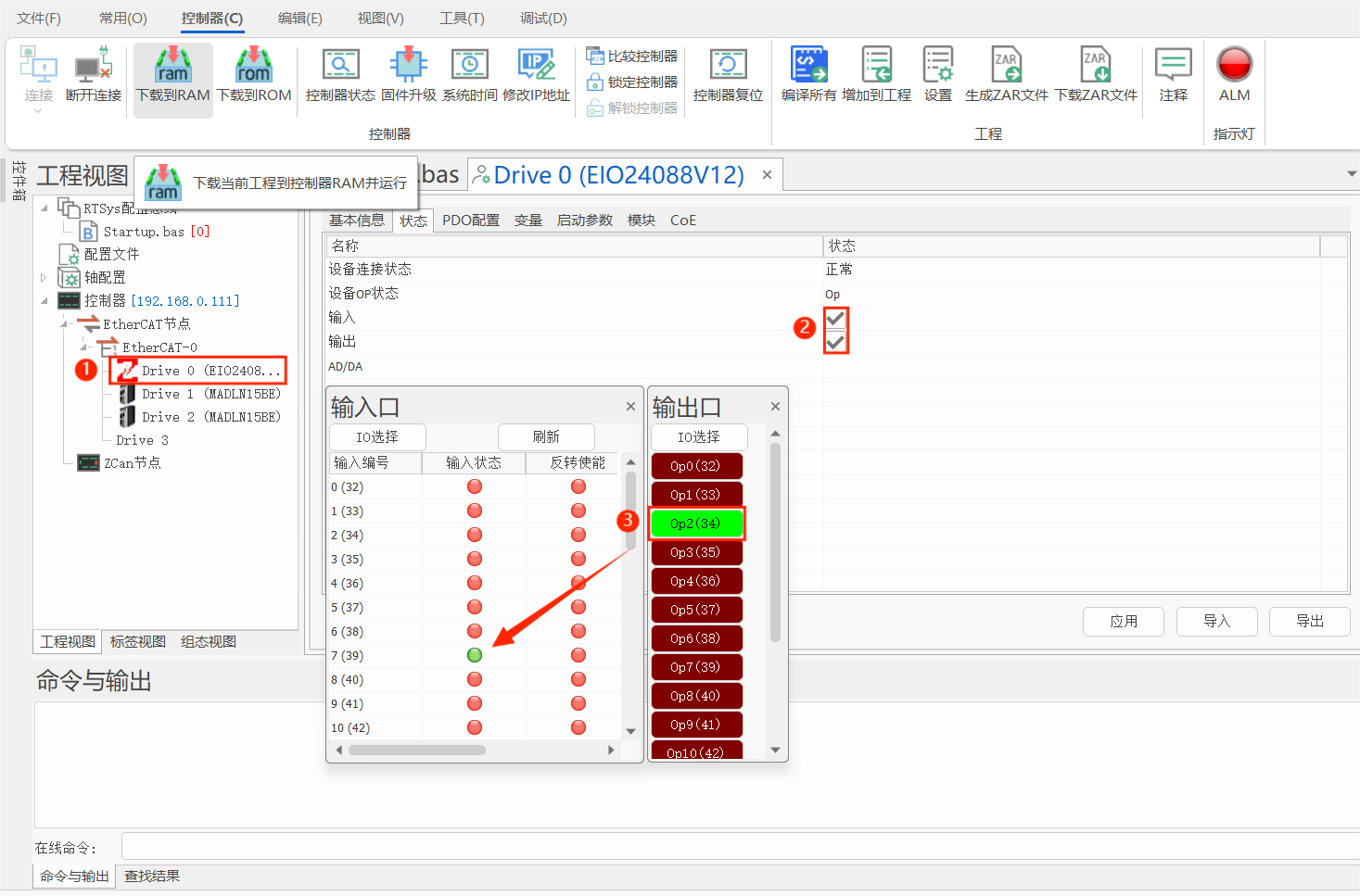
測試IO資源也可通過打開工程設(shè)置的EtherCAT配置測試總線擴(kuò)展模塊的IO資源。
(1)打開EIO24088-V2的界面;
(2)打開EIO24088-V2的輸入輸出口;
(3)將總線擴(kuò)展EIO24088-V2上的OUT2和IN7相連,把OUT2打開后IN7也被置1說明IO正常。
2、測試脈沖軸
首先將對要測試的脈沖軸進(jìn)行映射(初始化中已映射不需要),如測試EIO24088-V2的軸1。
AXIS_ADDRESS(7)=(0
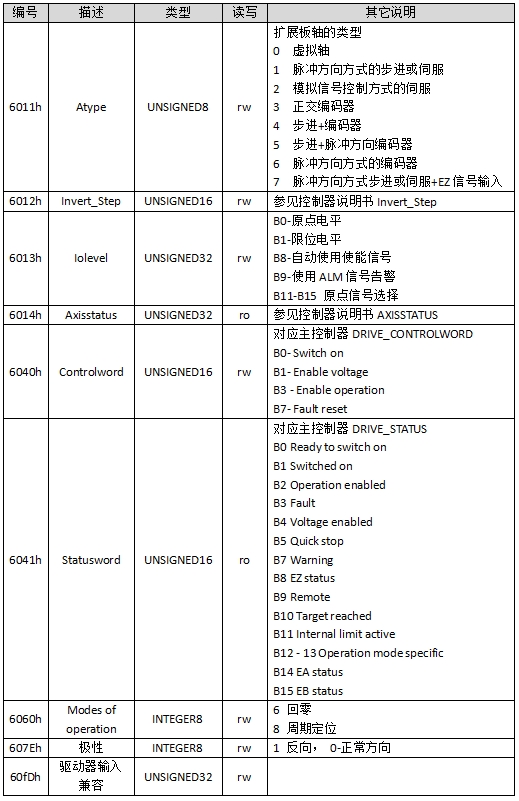
擴(kuò)展模塊的DRIVE_PROFILE配置為0,ATYPE設(shè)為65,但由于擴(kuò)展是總線轉(zhuǎn)脈沖型驅(qū)動器,軸類型并不是65,真實(shí)軸類型的配置使用SDO指令配置數(shù)據(jù)字典6011h設(shè)置。
SDO指令配置驅(qū)動器參數(shù):
例如:擴(kuò)展的脈沖軸的真實(shí)軸類型設(shè)置通過數(shù)據(jù)字典6011h設(shè)置,(參考下表的參數(shù),按軸號依次設(shè)置,第一個驅(qū)動器設(shè)置數(shù)據(jù)字典6011h+0*800h,第二個驅(qū)動器設(shè)置6011h+1*800h,以此類推,每個驅(qū)動器加800h,其他參數(shù)同理)。
(1)輸入輸出:

(2)第一個擴(kuò)展模塊上第一個驅(qū)動器:
數(shù)據(jù)字典讀取語法:
SDO_READ (槽位號, 設(shè)備編號, 數(shù)據(jù)字典編號, 數(shù)據(jù)字典子編號, 數(shù)據(jù)類型, 讀取數(shù)據(jù)存儲TABLE位置)
SDO_READ_AXIS (軸號, 數(shù)據(jù)字典編號, 數(shù)據(jù)字典子編號, 數(shù)據(jù)類型, 讀取數(shù)據(jù)存儲TABLE位置)
數(shù)據(jù)字典寫入語法:
SDO_WRITE (槽位號, 設(shè)備編號, 數(shù)據(jù)字典編號, 數(shù)據(jù)字典子編號, 數(shù)據(jù)類型, 寫入數(shù)據(jù)值)
SDO_WRITE_AXIS (軸號, 數(shù)據(jù)字典編號, 數(shù)據(jù)字典子編號, 數(shù)據(jù)類型, 寫入數(shù)據(jù)值)
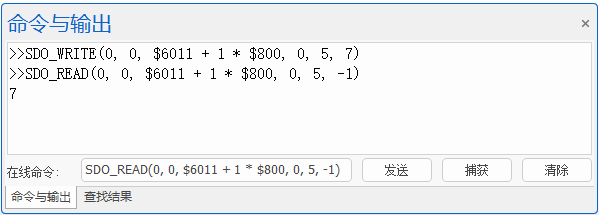
數(shù)據(jù)字典讀寫示例:
讀寫處于節(jié)點(diǎn)0的EIO24088-V2的軸1的軸類型。
SDO_WRITE(0,0,$6011+1*$800,0,5,7)'設(shè)置EIO24088-V2的軸1的軸類型為7 SDO_READ(0,0,$6011+1*$800,0,5,-1)'將軸1的軸類型數(shù)據(jù)打印出來
確認(rèn)好軸類型、脈沖模式,測試時先將UNITS(脈沖當(dāng)量)、SPEED(運(yùn)行速度)、ACCEL(加速度)、DECEL(減速度)設(shè)置小一些保證安全,若設(shè)置為自動使能(通過6013H的BIT8設(shè)置)檢查軸使能(AXIS_ENABLE)是否置1,手動使能則需軸使能(AXIS_ENABLE)及對應(yīng)軸使能輸出口置1。
發(fā)送運(yùn)動指令看電機(jī)是否正常運(yùn)動(看DPOS和MPOS是否變化),后續(xù)再根據(jù)驅(qū)動器移動1mm或轉(zhuǎn)動一圈的脈沖數(shù)填入UNITS,此時MOVE(1)即為移動1mm或轉(zhuǎn)動一圈,SPEED的單位為mm/s或r/s。

注意:
如果手動運(yùn)動時軸不移動但DPOS(指令位置)與MPOS(編碼器反饋位置)在變化說明軸有移動但移動距離太短肉眼看不出來,可適當(dāng)增加UNITS后再移動。
如果出現(xiàn)手動運(yùn)動時軸只能向一個方向移動則需檢查驅(qū)動器的軸類型及脈沖模式(通過驅(qū)動器手冊或其軟件知曉)和6011H及6012H中設(shè)置的軸類型和脈沖模式是否匹配,檢查接線是否松動。
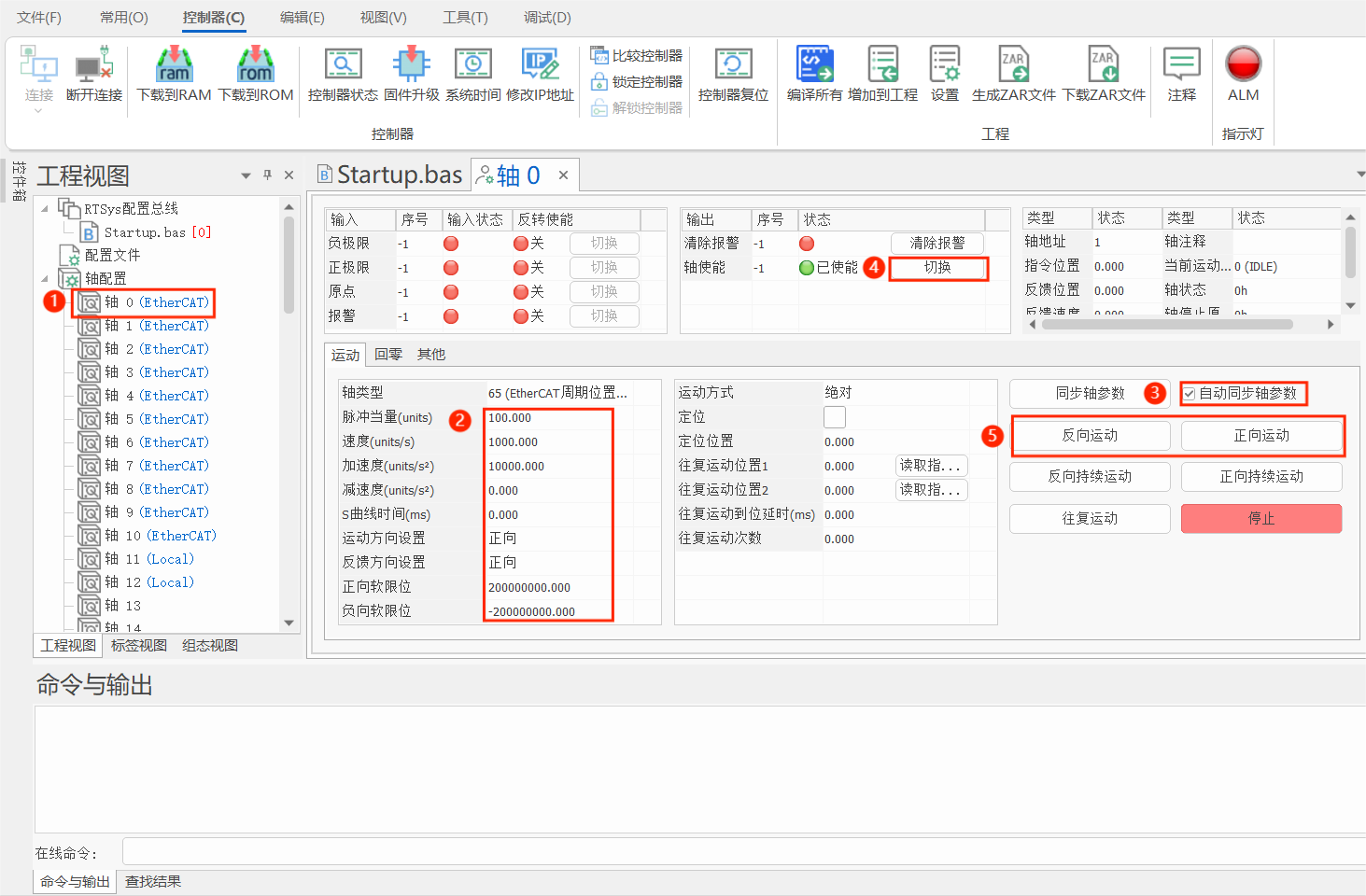
也可通過打開工程設(shè)置中的軸配置及EtherCAT配置測試總線擴(kuò)展模塊的總線轉(zhuǎn)脈沖軸。
(1)選擇需要測試的軸;
(2)設(shè)置合適的軸參數(shù);
(3)自動同步軸參數(shù);
(4)打開軸使能;
(5)通過正向運(yùn)動或反向運(yùn)動進(jìn)行點(diǎn)動測試軸是否正常。
教學(xué)視頻可點(diǎn)擊→8軸/4軸的EtherCAT軸模塊EIO24088-V2及EIO16084的使用(一):RTSys總線配置與使用查看。
本次,正運(yùn)動技術(shù)8軸/4軸的EtherCAT軸模塊EIO24088-V2及EIO16084的使用(一):RTSys總線配置與使用,就分享到這里。
更多精彩內(nèi)容請關(guān)注“正運(yùn)動小助手”公眾號,需要相關(guān)開發(fā)環(huán)境與例程代碼,請咨詢正運(yùn)動技術(shù)銷售工程師:400-089-8936。
本文由正運(yùn)動技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國智能制造水平。文章版權(quán)歸正運(yùn)動技術(shù)所有,如有轉(zhuǎn)載請注明文章來源。
正運(yùn)動技術(shù)專注于運(yùn)動控制技術(shù)研究和通用運(yùn)動控制軟硬件產(chǎn)品的研發(fā),是國家級高新技術(shù)企業(yè)。正運(yùn)動技術(shù)匯集了來自華為、中興等公司的優(yōu)秀人才,在堅持自主創(chuàng)新的同時,積極聯(lián)合各大高校協(xié)同運(yùn)動控制基礎(chǔ)技術(shù)的研究,是國內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國內(nèi)少有、完整掌握運(yùn)動控制核心技術(shù)和實(shí)時工控軟件平臺技術(shù)的企業(yè)。主要業(yè)務(wù)有:運(yùn)動控制卡_運(yùn)動控制器_EtherCAT運(yùn)動控制卡_EtherCAT控制器_運(yùn)動控制系統(tǒng)_視覺控制器__運(yùn)動控制PLC_運(yùn)動控制_機(jī)器人控制器_視覺定位_XPCIe/XPCI系列運(yùn)動控制卡等等。
審核編輯 黃宇
-
總線配置
+關(guān)注
關(guān)注
0文章
2瀏覽量
5595 -
RTS
+關(guān)注
關(guān)注
0文章
21瀏覽量
14311 -
ethercat
+關(guān)注
關(guān)注
18文章
655瀏覽量
38607
發(fā)布評論請先 登錄
相關(guān)推薦
8軸/4軸的EtherCAT軸模塊EIO24088-V2及EIO16084的使用(一)RTSys總線配置與使用

EIO24088-V2及EIO16084的使用(一)RTSys總線配置與使用 #正運(yùn)動技術(shù) #運(yùn)動控制器

EIO24088G-V2及EIO16084G的使用(一):TwinCAT總線配置與使用#正運(yùn)動技術(shù)
8軸/4軸的EtherCAT軸模塊EIO24088G-V2及EIO16084G的使用(一):TwinCAT總線配置與使用
使用MSPM0 MCU設(shè)計單軸和三軸自拍桿

EtherCAT PLC帶軸數(shù)的限制影響因素
多軸高性能EtherCAT總線運(yùn)動控制器ZMC408CE硬件介紹

陀螺儀x軸和y軸的應(yīng)用
陀螺儀x和y比例是多少 陀螺儀x軸和y軸是指什么
陀螺儀三軸六軸區(qū)別
三軸陀螺儀模塊怎么使用
為什么要將電流分解為q軸和d軸呢?
EtherCAT總線運(yùn)動控制的優(yōu)勢主要體現(xiàn)在哪?
正運(yùn)動技術(shù)EtherCAT擴(kuò)展模塊接線參考以及使用流程
EtherCAT超高速實(shí)時運(yùn)動控制卡XPCIE1032H上位機(jī)C#開發(fā)(四):板載IO與總線擴(kuò)展IO的編碼器與脈沖配置的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論