") 基于CMOS APS和SoPC芯片 設(shè)計(jì)了微小型星敏感器的光學(xué)及電學(xué)系統(tǒng)
基于CMOS APS和SoPC芯片 設(shè)計(jì)了微小型星敏感器的光學(xué)及電學(xué)系統(tǒng)
星敏感器是所有敏感器中最為精密而且漂移最小的,是航天飛行器中重要的定姿系統(tǒng)。使用CMOS作為星敏感器的傳感器器件已經(jīng)是現(xiàn)在的主流方向,國(guó)產(chǎn)星敏感器與國(guó)外先進(jìn)技術(shù)存在著較大的差距,使用國(guó)產(chǎn)化器件,擁有自主知識(shí)產(chǎn)權(quán)的微小型化星敏感器已經(jīng)變得迫在眉睫。本文以某國(guó)產(chǎn)化CMOS APS芯片和SoPC控制芯片設(shè)計(jì)星敏感器,對(duì)其光學(xué)及電學(xué)系統(tǒng)進(jìn)行研究設(shè)計(jì)。
1 星敏感器設(shè)計(jì)
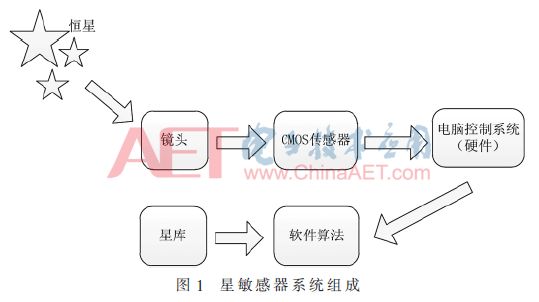
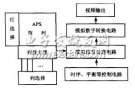
星敏感器系統(tǒng)由遮光罩、光學(xué)鏡頭、敏感器芯片及外圍電路、數(shù)據(jù)處理器和電腦控制系統(tǒng)組成,其組成框圖如圖1所示。
1.1 光學(xué)系統(tǒng)設(shè)計(jì)
本文中使用的CMOS APS傳感器為某國(guó)產(chǎn)型號(hào)B1XXX,電路中各項(xiàng)功能、指標(biāo)、參數(shù)、封裝形式、引腳定義均兼容最常用的美國(guó)CYPRESS公司STAR1000產(chǎn)品,其參數(shù)見(jiàn)表1。

星敏感器光學(xué)系統(tǒng)參數(shù)會(huì)根據(jù)不同的應(yīng)用環(huán)境而有所不同,它主要由以下幾點(diǎn)確定:傳感器的像元尺寸、光譜響應(yīng)特性、所需探測(cè)的最高星等。光學(xué)系統(tǒng)的參數(shù)需要設(shè)定的有鏡頭的焦距、光譜范圍、彌散斑尺寸、通光孔徑、中心波長(zhǎng)透過(guò)率等[1]。
1.1.1 視場(chǎng)角的確定
視場(chǎng)角是確定光學(xué)鏡頭能夠探測(cè)到星空最大范圍的指標(biāo)。在同等條件下,視場(chǎng)角越大,能夠觀測(cè)到的星數(shù)越多。但是過(guò)多的星數(shù)會(huì)干擾后續(xù)的計(jì)算,所以選擇合適的視場(chǎng)角是構(gòu)建光學(xué)系統(tǒng)的第一步。
本文使用的APS CMOS傳感器是某國(guó)產(chǎn)芯片。像元尺寸15 μm,分辨率1 024×1 024,工作波長(zhǎng)范圍選定為400 nm~780 nm。要求在任意姿態(tài)下捕獲4顆以上導(dǎo)航星的概率達(dá)到99%,以便后續(xù)計(jì)算[2]。根據(jù)這一數(shù)據(jù)要求,通過(guò)編程處理星表,可得在給定視場(chǎng)內(nèi)觀測(cè)到各個(gè)星等的數(shù)量。進(jìn)一步統(tǒng)計(jì)當(dāng)星等為5.5等時(shí),選取視場(chǎng)角為20°×20°能夠滿足在任意視場(chǎng)內(nèi)觀測(cè)到4顆及以上星星這一條件。故選取20°×20°作為視場(chǎng)角。
1.1.2 焦距的確定
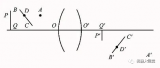
焦距是確定成像平面到鏡面的距離。由于選取的物體遠(yuǎn)近不同,焦距會(huì)產(chǎn)生相應(yīng)的變化。在太空中,星星的位置與距離相對(duì)固定,所以與普通的相機(jī)變焦不同,星敏感器的焦距是固定的。現(xiàn)有光學(xué)系統(tǒng)視場(chǎng)和焦距關(guān)系式為:
1.1.3 彌散斑尺寸的確定
本文以 20°×20°的視場(chǎng)角為例,采用1 024×1 024 像元,則單個(gè)像元僅能達(dá)到20/1 024≈0.019 5°≈70″。為了提高像元測(cè)算的精準(zhǔn)度,需要將傳感器接收到的圖像進(jìn)行離焦,使像點(diǎn)彌散開(kāi)來(lái),從而使能量擴(kuò)散到周圍的數(shù)個(gè)像元。將多個(gè)像元的能量信號(hào)進(jìn)行匯總,根據(jù)一定的算法,共同計(jì)算并獲取星點(diǎn)的位置。這樣做的目的是使得星點(diǎn)位置不僅僅從單個(gè)像元上獲得,而是能夠達(dá)到亞像元級(jí)別。即亞像元內(nèi)插星點(diǎn)提取方法[3]。目前常用的彌散斑尺寸大小有2×2像元或者3×3像元,使用大的彌散斑尺寸能提高定位精度,但會(huì)影響到后續(xù)的計(jì)算速度。本文采取2×2像元大小作為彌散斑尺寸。
1.1.4 相對(duì)孔徑的確定
孔徑與焦距用相對(duì)孔徑F表示,即F/#=f/D。國(guó)標(biāo)GB/T 30111-2013中,對(duì)相對(duì)孔徑的定義是入瞳直徑與焦距的比值,即D/f,其數(shù)值在1/0.8~1/6之間選取。
F/#的計(jì)算由以下公式給出[4]:

其中Vth為信噪比,取值5;Id為暗電流噪聲;
1.2 電學(xué)系統(tǒng)設(shè)計(jì)
1.2.1 CMOS APS傳感器分析
本文所用的B1XXX是一款具有1 024×1 024分辨率的抗輻射CMOS圖像傳感器,像素尺寸為15 μm×15 μm。電路各項(xiàng)功能、指標(biāo)、封裝形式、引腳定義均兼容美國(guó)CYPRESS公司的STAR1000產(chǎn)品。片內(nèi)集成了雙采樣技術(shù)、可變?cè)鲆娣糯笃?/u>(PGA)以及12位模數(shù)轉(zhuǎn)換器(ADC)。且片上ADC電學(xué)可隔離,既可以采用片上ADC數(shù)字量化輸出,也可以依據(jù)用戶需求,直接輸出光模擬信號(hào)。
電路具有智能窗口功能,即像素陣列的X、Y地址可隨機(jī)編程,實(shí)現(xiàn)對(duì)窗口大小、起止地址的隨機(jī)控制;具有高靈敏度(≥2.7 V/lux·s(@550 nm)),可適應(yīng)空間微光環(huán)境需求;具有1、2、4、8倍可編程增益,可以根據(jù)光照強(qiáng)弱控制輸出增益,適應(yīng)更寬工作環(huán)境;具有雙斜積分功能,可大大提高動(dòng)態(tài)范圍,從而提高同一環(huán)境下強(qiáng)光弱光同時(shí)存在時(shí)的適應(yīng)性;抗輻射總劑量能力≥100 Krad(Si),抗單粒子閂鎖LET≥75 Mev·cm2/mg。
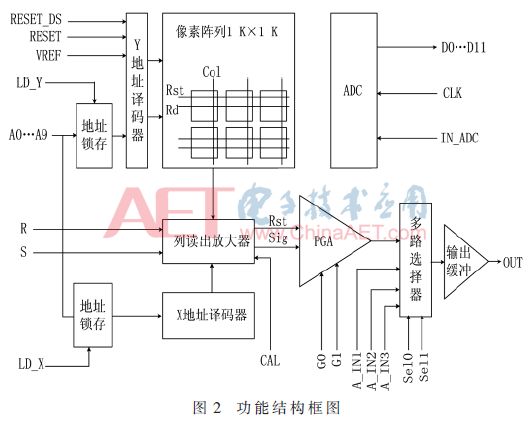
器件結(jié)構(gòu)及特點(diǎn):B1XXX的功能結(jié)構(gòu)框圖如圖2所示。該圖像傳感器主要包含6個(gè)部分:像素陣列、尋址邏輯、前置列放大器、可編程增益放大器(PGA)、模擬多路選擇器和ADC。
1.2.2 FPGA時(shí)序驅(qū)動(dòng)模塊
焦平面圖像傳感器的選擇直接關(guān)系到星敏感器的核心設(shè)計(jì)。
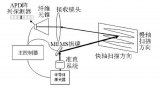
本系統(tǒng)利用FPGA實(shí)現(xiàn)對(duì)CMOS圖像傳感器的驅(qū)動(dòng)、CMOS圖像傳感器與處理器系統(tǒng)的接口,以及星圖存儲(chǔ)或星圖預(yù)處理等功能。單時(shí)鐘全同步的設(shè)計(jì)被設(shè)計(jì)中所使用,外部20 MHz晶振提供了時(shí)鐘輸入來(lái)源,內(nèi)部則進(jìn)行分頻處理。這一較為復(fù)雜的時(shí)序邏輯能夠通過(guò)編程得以實(shí)現(xiàn)[5],如圖3所示。

1.2.3 信號(hào)處理方案
信號(hào)處理板采用了國(guó)產(chǎn)SoPC核心信號(hào)處理板,該核心板基于國(guó)產(chǎn)SoPC進(jìn)行二次集成開(kāi)發(fā),將SoPC最小應(yīng)用系統(tǒng)、基礎(chǔ)配置電路和通信接口模塊集成在了尺寸為51.4 mm×51.4 mm的小型SoC板上。其中SoPC芯片總體結(jié)構(gòu)框圖如圖4所示。
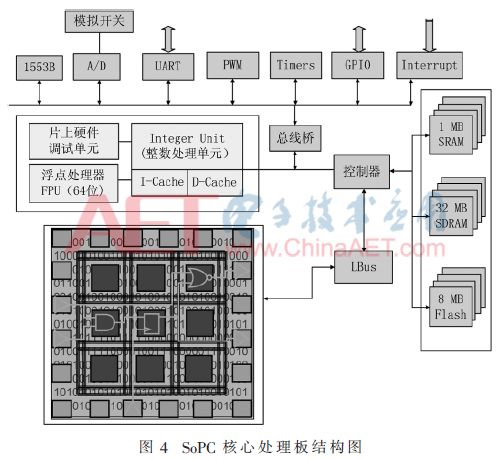
此外,核心信號(hào)處理板還包括了基礎(chǔ)的配置及與應(yīng)用系統(tǒng)的通信接口,主要包括:PLL配置、調(diào)試接口配置、復(fù)位模塊、時(shí)鐘模塊、FPGA配置等。通信接口主要包括:1553通信接口、ADC接口、串行通信接口、可擴(kuò)展GPIO接口、中斷接口、I2C總線、定時(shí)器/計(jì)數(shù)器輸入/輸出接口、測(cè)試與指示接口等。這些基本可以滿足星敏感器的軟件需求。
最終設(shè)計(jì)方案為:將星敏感器電學(xué)系統(tǒng)(不含外殼)尺寸小型化到60 mm×60 mm,2塊電路板重量(含緊固件)共計(jì)約60 g,靜態(tài)功耗約1.2 W。
2 APS星敏感器軟件方案
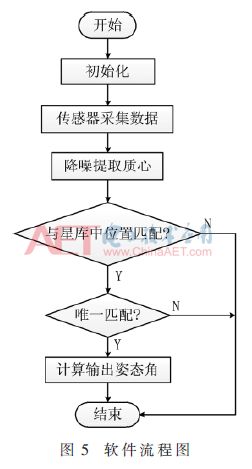
星敏感器的軟件算法主要包括星庫(kù)建立、星圖預(yù)處理、星圖識(shí)別與星圖匹配、姿態(tài)解算等部分。
(1)星庫(kù)建立
星庫(kù)是根據(jù)星表篩選后建立的導(dǎo)航星的集合,其作用是在進(jìn)行星圖匹配時(shí)提供匹配的依據(jù)。確定好星表后,就可以根據(jù)星表建立起相應(yīng)的導(dǎo)航星庫(kù)。
(2)星圖預(yù)處理
在傳感器獲得圖像之后,由于各種噪聲的存在,需要在處理數(shù)據(jù)之前進(jìn)行降噪,隨后將星點(diǎn)質(zhì)心提取,提供給星圖識(shí)別算法。
在實(shí)際應(yīng)用中采用了簡(jiǎn)單的平均值去噪方法。由于固定噪聲的數(shù)值在一定范圍內(nèi)不規(guī)律地呈現(xiàn),故可以取其平均值作為系統(tǒng)的固定噪聲,再用采集的圖像與平均值求差,可以得到初步的降噪效果。具體方法為:使用星敏感器系統(tǒng)連續(xù)拍攝在黑暗條件下的圖片,獲取其中噪點(diǎn)的信息,包括位置及數(shù)值。在同一位置獲得的噪點(diǎn)信息,使用平均值法算出均值作為其最終數(shù)值。
由于積分時(shí)間不同,固定噪聲呈現(xiàn)出的噪點(diǎn)會(huì)有略微不同。統(tǒng)計(jì)在積分時(shí)間為10 ms、50 ms、100 ms的情況下,采用10次平均值方法得出的平均噪聲與實(shí)際的差值。
在采集全黑的圖片時(shí),固定噪聲干擾會(huì)帶來(lái)大約3.6%左右的影響。噪聲灰度值集中在08~10左右。當(dāng)使用平均值去噪方法后,噪聲灰度值集中在00~02左右。表2為不同積分時(shí)間下使用平均值去噪的效果。

(3)星圖識(shí)別與星圖匹配
在提取質(zhì)心信息后,在導(dǎo)航星庫(kù)中搜索識(shí)別相同信息的導(dǎo)航星,如果獲得唯一匹配的導(dǎo)航星,則匹配成功。
(4)姿態(tài)解算
當(dāng)匹配成功后進(jìn)行姿態(tài)解算,算出當(dāng)前的姿態(tài)角或四元數(shù)數(shù)據(jù),輸出結(jié)果。
圖5為星敏感器軟件流程圖。
3 結(jié)論
本文根據(jù)某國(guó)產(chǎn)抗輻射COMS APS芯片和SoPC控制芯片,設(shè)計(jì)了微小型星敏感器的光學(xué)及電學(xué)系統(tǒng)。根據(jù)現(xiàn)有的傳感器特性,有針對(duì)性地選擇合適的光學(xué)系統(tǒng)參數(shù),并得出其確定參數(shù)。光學(xué)系統(tǒng)在確定了視場(chǎng)角和APS傳感器之后,就可以依次得出焦距、相對(duì)孔徑等參數(shù)。星敏感器根據(jù)硬件及系統(tǒng)的要求,設(shè)計(jì)了FPGA驅(qū)動(dòng)模塊和信號(hào)處理模塊。星敏感器硬件完全國(guó)產(chǎn)自主化,并符合GB/T 30111-2013中對(duì)于星敏感器的要求,軟件部分根據(jù)現(xiàn)有的器件參數(shù)進(jìn)行編程。最后,設(shè)計(jì)并完成了一套國(guó)產(chǎn)化星敏感器實(shí)驗(yàn)原理樣機(jī)。
-
sopc
+關(guān)注
關(guān)注
2文章
247瀏覽量
61763 -
光學(xué)系統(tǒng)
+關(guān)注
關(guān)注
4文章
235瀏覽量
18213 -
星敏感器
+關(guān)注
關(guān)注
0文章
12瀏覽量
11237 -
COMS
+關(guān)注
關(guān)注
1文章
91瀏覽量
32845
原文標(biāo)題:【學(xué)術(shù)論文】國(guó)產(chǎn)化微小型星敏感器研究及應(yīng)用
文章出處:【微信號(hào):ChinaAET,微信公眾號(hào):電子技術(shù)應(yīng)用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
切換變倍光學(xué)系統(tǒng)設(shè)計(jì)
OCAD光學(xué)系統(tǒng)自動(dòng)設(shè)計(jì)程序
光盤(pán)驅(qū)動(dòng)器電學(xué)系統(tǒng)設(shè)計(jì)與實(shí)驗(yàn)
CMOS APS實(shí)現(xiàn)高精度太陽(yáng)敏感器
光學(xué)自動(dòng)設(shè)計(jì)及光學(xué)系統(tǒng)的分析

基于二維MEMS掃描振鏡的激光雷達(dá)設(shè)計(jì)了發(fā)射光學(xué)系統(tǒng)和接收光學(xué)系統(tǒng)
高斯光學(xué),理想的光學(xué)系統(tǒng)
CMOS圖像傳感器的光學(xué)和電學(xué)特性仿真研究
光學(xué)系統(tǒng)低誤差敏感度設(shè)計(jì)方法的研究現(xiàn)狀與進(jìn)展
光學(xué)系統(tǒng)設(shè)計(jì)流程

光學(xué)系統(tǒng)的基本特性
折衍射混合成像光學(xué)系統(tǒng)設(shè)計(jì)
折反式變形光學(xué)系統(tǒng)設(shè)計(jì)
基于離軸成像光學(xué)系統(tǒng)的設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論