") 步進(jìn)電機(jī)如何自適應(yīng)控制?步進(jìn)電機(jī)如何細(xì)分驅(qū)動(dòng)控制?
步進(jìn)電機(jī)如何自適應(yīng)控制?步進(jìn)電機(jī)如何細(xì)分驅(qū)動(dòng)控制?
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的電機(jī),廣泛應(yīng)用于各種自動(dòng)化控制系統(tǒng)中。為了提高步進(jìn)電機(jī)的性能,自適應(yīng)控制和細(xì)分驅(qū)動(dòng)控制是兩種重要的技術(shù)手段。
一、步進(jìn)電機(jī)的自適應(yīng)控制
自適應(yīng)控制是一種智能控制方法,它可以根據(jù)系統(tǒng)參數(shù)的變化和外部干擾自動(dòng)調(diào)整控制策略,以實(shí)現(xiàn)對(duì)系統(tǒng)的穩(wěn)定和精確控制。在步進(jìn)電機(jī)的自適應(yīng)控制中,主要涉及到以下幾個(gè)方面:
- 系統(tǒng)建模:首先需要對(duì)步進(jìn)電機(jī)的動(dòng)態(tài)特性進(jìn)行建模,包括電機(jī)的轉(zhuǎn)矩、速度、位置等參數(shù)。這可以通過(guò)實(shí)驗(yàn)數(shù)據(jù)擬合、理論分析或數(shù)值仿真等方法實(shí)現(xiàn)。
- 參數(shù)估計(jì):在實(shí)際應(yīng)用中,步進(jìn)電機(jī)的參數(shù)可能會(huì)發(fā)生變化,因此需要實(shí)時(shí)估計(jì)電機(jī)的參數(shù)。這可以通過(guò)在線參數(shù)估計(jì)方法實(shí)現(xiàn),如卡爾曼濾波、遞歸最小二乘等。
- 控制策略設(shè)計(jì):根據(jù)系統(tǒng)模型和參數(shù)估計(jì)結(jié)果,設(shè)計(jì)自適應(yīng)控制策略。常見(jiàn)的自適應(yīng)控制策略有模型預(yù)測(cè)控制(MPC)、自適應(yīng)PID控制、滑模控制等。
- 控制器實(shí)現(xiàn):將設(shè)計(jì)好的自適應(yīng)控制策略實(shí)現(xiàn)為控制器,通過(guò)微處理器或數(shù)字信號(hào)處理器(DSP)等硬件設(shè)備實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。
- 性能評(píng)估:在實(shí)際應(yīng)用中,需要對(duì)自適應(yīng)控制器的性能進(jìn)行評(píng)估,以確保系統(tǒng)的穩(wěn)定性和精確性。這可以通過(guò)實(shí)驗(yàn)數(shù)據(jù)、仿真結(jié)果或理論分析等方法實(shí)現(xiàn)。
二、步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)控制
細(xì)分驅(qū)動(dòng)控制是一種提高步進(jìn)電機(jī)分辨率和性能的技術(shù)手段。它通過(guò)將步進(jìn)電機(jī)的步距角細(xì)分為更小的步距,實(shí)現(xiàn)對(duì)電機(jī)的更精確控制。細(xì)分驅(qū)動(dòng)控制的主要原理和方法如下:
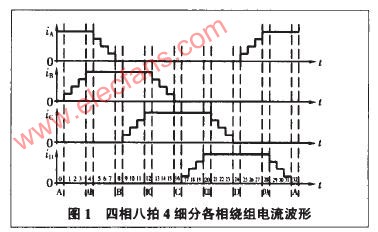
- 細(xì)分原理:步進(jìn)電機(jī)的步距角是由電機(jī)的轉(zhuǎn)子和定子之間的磁極對(duì)數(shù)決定的。通過(guò)改變定子繞組的電流,可以實(shí)現(xiàn)對(duì)電機(jī)步距角的控制。細(xì)分驅(qū)動(dòng)控制就是通過(guò)改變定子繞組的電流,將步距角細(xì)分為更小的步距。
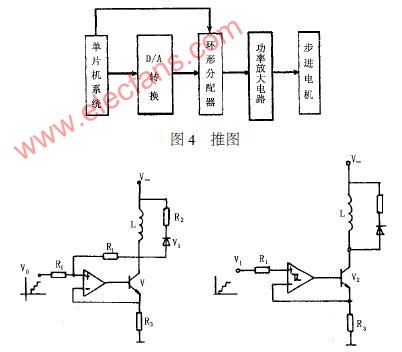
- 細(xì)分驅(qū)動(dòng)器:細(xì)分驅(qū)動(dòng)器是實(shí)現(xiàn)細(xì)分驅(qū)動(dòng)控制的關(guān)鍵設(shè)備。它可以根據(jù)控制信號(hào),對(duì)定子繞組的電流進(jìn)行精確控制,實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)。細(xì)分驅(qū)動(dòng)器通常采用數(shù)字信號(hào)處理器(DSP)或微控制器(MCU)等高性能處理器實(shí)現(xiàn)。
- 細(xì)分算法:細(xì)分算法是實(shí)現(xiàn)細(xì)分驅(qū)動(dòng)控制的核心。它可以根據(jù)控制信號(hào)和電機(jī)參數(shù),計(jì)算出定子繞組的電流值,實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)。常見(jiàn)的細(xì)分算法有恒流細(xì)分、恒壓細(xì)分、恒流恒壓細(xì)分等。
- 細(xì)分精度:細(xì)分精度是衡量細(xì)分驅(qū)動(dòng)控制性能的重要指標(biāo)。它表示細(xì)分驅(qū)動(dòng)控制可以實(shí)現(xiàn)的最小步距角。細(xì)分精度越高,步進(jìn)電機(jī)的分辨率和性能就越好。細(xì)分精度可以通過(guò)提高細(xì)分驅(qū)動(dòng)器的性能、優(yōu)化細(xì)分算法等方法提高。
- 應(yīng)用領(lǐng)域:細(xì)分驅(qū)動(dòng)控制技術(shù)在許多領(lǐng)域都有廣泛的應(yīng)用,如數(shù)控機(jī)床、機(jī)器人、精密儀器等。通過(guò)細(xì)分驅(qū)動(dòng)控制,可以實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的更精確控制,提高系統(tǒng)的穩(wěn)定性和性能。
三、自適應(yīng)控制與細(xì)分驅(qū)動(dòng)控制的結(jié)合
自適應(yīng)控制和細(xì)分驅(qū)動(dòng)控制都是提高步進(jìn)電機(jī)性能的重要技術(shù)手段。將兩者結(jié)合,可以實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的更精確和穩(wěn)定控制。具體方法如下:
- 自適應(yīng)細(xì)分控制:在細(xì)分驅(qū)動(dòng)控制的基礎(chǔ)上,引入自適應(yīng)控制技術(shù),實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的自適應(yīng)細(xì)分控制。這可以通過(guò)在線參數(shù)估計(jì)、自適應(yīng)控制策略設(shè)計(jì)等方法實(shí)現(xiàn)。
- 自適應(yīng)細(xì)分算法:在細(xì)分算法的基礎(chǔ)上,引入自適應(yīng)控制技術(shù),實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的自適應(yīng)細(xì)分算法。這可以通過(guò)在線參數(shù)估計(jì)、自適應(yīng)控制策略設(shè)計(jì)等方法實(shí)現(xiàn)。
- 自適應(yīng)細(xì)分驅(qū)動(dòng)器:在細(xì)分驅(qū)動(dòng)器的基礎(chǔ)上,引入自適應(yīng)控制技術(shù),實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的自適應(yīng)細(xì)分驅(qū)動(dòng)器。這可以通過(guò)在線參數(shù)估計(jì)、自適應(yīng)控制策略設(shè)計(jì)等方法實(shí)現(xiàn)。
- 自適應(yīng)細(xì)分控制策略:在自適應(yīng)控制策略的基礎(chǔ)上,引入細(xì)分驅(qū)動(dòng)控制技術(shù),實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的自適應(yīng)細(xì)分控制策略。這可以通過(guò)在線參數(shù)估計(jì)、自適應(yīng)控制策略設(shè)計(jì)等方法實(shí)現(xiàn)。
- 自適應(yīng)細(xì)分控制性能評(píng)估:在自適應(yīng)控制性能評(píng)估的基礎(chǔ)上,引入細(xì)分驅(qū)動(dòng)控制技術(shù),實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的自適應(yīng)細(xì)分控制性能評(píng)估。這可以通過(guò)實(shí)驗(yàn)數(shù)據(jù)、仿真結(jié)果或理論分析等方法實(shí)現(xiàn)。
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
150文章
3097瀏覽量
147357 -
參數(shù)
+關(guān)注
關(guān)注
11文章
1791瀏覽量
32110 -
驅(qū)動(dòng)控制
+關(guān)注
關(guān)注
0文章
120瀏覽量
15742 -
脈沖信號(hào)
+關(guān)注
關(guān)注
6文章
396瀏覽量
36918
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
FPGA步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)控制設(shè)計(jì)
步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)原理
步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)的實(shí)質(zhì)是什么
為什么步進(jìn)電機(jī)驅(qū)動(dòng)要引入細(xì)分控制?
步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)原理
步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)電路及原理
步進(jìn)電機(jī)細(xì)分控制原理
步進(jìn)電機(jī)控制芯片與驅(qū)動(dòng)電路
步進(jìn)電機(jī)驅(qū)動(dòng)器及細(xì)分控制原理
模糊PID控制的步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)器設(shè)計(jì)
步進(jìn)電機(jī)驅(qū)動(dòng)器怎么設(shè)置細(xì)分
步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)及加減速控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論