 其利天下技術·伺服電機的工作原理及常用控制算法-低壓伺服電機驅動方案開發
其利天下技術·伺服電機的工作原理及常用控制算法-低壓伺服電機驅動方案開發
伺服電機作為精密控制系統的重要組成部分,廣泛應用于工業自動化、機器人、數控機床、自動化生產線等領域。隨著技術的進步和行業需求的不斷變化,伺服電機也在不斷發展。今天,我們聊聊伺服電機的工作原理、控制方式以及常用的控制算法。
 其利天下·低壓伺服電機驅動器方案
其利天下·低壓伺服電機驅動器方案伺服電機的工作原理
閉環反饋系統:
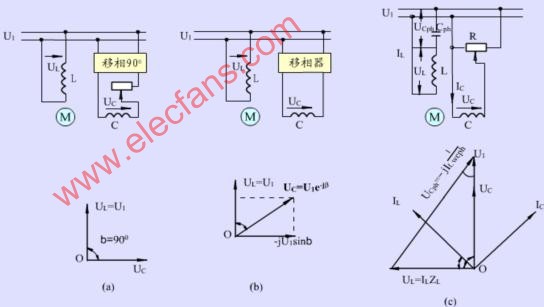
伺服電機的核心是閉環控制系統,閉環反饋通過傳感器(編碼器或旋轉變壓器)實時監測電機的運行狀態(如位置、速度等),將反饋信號傳回控制器。
控制器將反饋值與目標值(設定值)進行比較,生成誤差信號,再通過驅動器調整電機的電壓、電流,修正電機的動作。
反饋調節:
當電機轉動時,傳感器實時測量轉動的角度或速度,并將信號反饋給控制系統。
控制系統對比反饋信號與預設目標值,利用控制算法產生調節信號,通過驅動器控制電機的運動,使電機逐步逼近設定的目標。
伺服電機的控制方式
位置控制:
控制電機的轉動角度,確保其在某一目標位置停留。 控制器接收位置指令信號(通常是脈沖信號),通過反饋裝置(如編碼器)調整電機轉動,確保精確到達目標位置。 這種方式多用于精密加工、機器人等需要精準定位的場合。
速度控制:
通過調節電機的輸入信號控制其旋轉速度,通常通過調節驅動器的輸入頻率或電壓實現。 控制器實時監測電機速度,調節電流以保持目標速度,適合傳送帶、卷繞機等需要恒速運轉的設備。
力矩控制(扭矩控制):
控制電機輸出的扭矩,通過調節電流來調整力矩大小。控制系統實時監測電流變化,并調節輸出,確保電機的輸出力矩保持穩定。 這種方式常用于需要恒定力矩的應用場景,如張力控制、負載變化較大的設備。
伺服電機的常用控制算法
PID 控制算法:
PID(比例-積分-微分)控制是伺服電機中最常見的控制算法,用于調節位置、速度和力矩控制。
P(比例):控制當前誤差,響應迅速。
I(積分):累積誤差,消除長期誤差。
D(微分):控制誤差的變化率,提升系統的穩定性和響應速度。
PID 控制通過調節三個參數(比例、積分、微分),確保系統迅速達到設定值并避免過沖或震蕩。
模糊控制算法:
模糊控制是一種基于經驗和規則的控制方法,用于處理復雜的、非線性系統。
模糊控制適用于系統模型難以精確建立的情況,通過模糊規則集對系統進行控制,常用于負載變化較大或干擾較多的場景。
自適應控制算法:
自適應控制可以根據電機的動態行為自動調整控制參數,適應不同的工作條件。
該算法實時監控電機的狀態,動態調節控制器參數,適用于負載變化較大的伺服系統。
滑模控制(SMC):
滑模控制是一種非線性控制方法,能夠在不精確的模型條件下提供魯棒控制。它通過設計滑模面,讓系統在滑模面內保持穩定,從而減少系統的抖動和誤差。
滑模控制適合在存在外部干擾和建模不準確的環境下使用。
模型預測控制(MPC):
模型預測控制通過預測系統的未來行為,計算最優控制信號,適合復雜、多輸入多輸出系統。
伺服控制中的MPC可以提前預測并優化系統的控制路徑,常用于高動態響應需求的場合。
神經網絡控制:
神經網絡控制算法使用神經網絡的自學習能力,根據輸入和輸出關系動態調整控制策略,適用于非線性、復雜的控制系統。
這種算法可以適應不同的工作條件,尤其是在伺服系統中存在未知非線性或復雜關系時表現出色。
-
控制器
+關注
關注
112文章
16214瀏覽量
177478 -
電機
+關注
關注
142文章
8940瀏覽量
145136 -
電機驅動
+關注
關注
60文章
1208瀏覽量
86630 -
伺服電機控制
+關注
關注
0文章
15瀏覽量
7496 -
PCBA板
+關注
關注
0文章
141瀏覽量
11149
發布評論請先 登錄
相關推薦
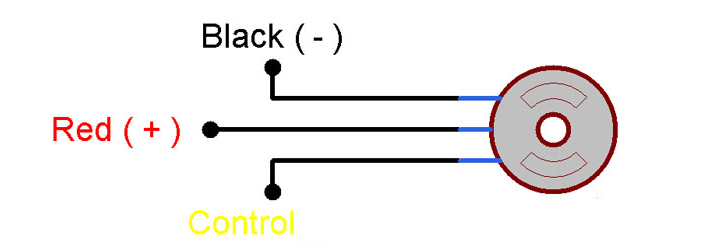
伺服電機的引腳圖/工作原理/應用
伺服電機的結構和工作原理是什么

其利天下技術·伺服電機編碼器的作用及工作原理·低壓伺服電機驅動方案開發

其利天下技術·伺服電機編碼器的種類及優缺點分析·伺服電機驅動器方案開發

其利天下技術開發·引起伺服電機抖動的可能性因素·伺服電機驅動器開發






 工商網監
工商網監
評論