 關于GPS天線陣抗干擾射頻前端設計
關于GPS天線陣抗干擾射頻前端設計
引言
全球定位系統(Global Position System,GPS)衛星發射的信號功率小,到達地面信號微弱,再加上無法預料的惡劣環境以及專用GPS干擾機[1]的出現,這些都會直接導致GPS信號受到干擾,嚴重時甚至無法正常工作[1-2]。因此,為了使GPS接收機能夠應付更加復雜的環境,提高其自身的抗干擾能力,開展GPS抗干擾技術的研究得到了廣泛的關注[3]。
目前針對GPS抗干擾技術的研究主要包括自適應天線陣列[4]、天線增強、前端濾波技術[5]、碼環跟蹤[6]以及空時自適應信號處理等技術。自適應天線陣列技術能夠抑制多種干擾,是該領域的主要研究模型[7]。該模型要求同時接收多路衛星信號。現有GPS接收機射頻前端主要接收一路或兩路信號[8-9],不能滿足要求。因此,本文設計了四元天線陣列GPS抗干擾射頻前端。方案采用了低噪聲、濾波、混頻、鎖相環、自動增益控制等技術模塊。與文獻[10] GPS射頻前端相比,本設計輸出中頻較低,相差達40 MHz,能夠降低損耗,提高信號穩定度,便于后續處理。
1 總體設計
GPS接收系統包括衛星天線、射頻前端、基帶信號處理三個部分。在超外差接收機中,射頻前端的功能是對GPS信號進行信號調理,下變頻到中頻段,為后續A/D采樣提供信號。
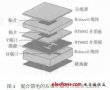
天線陣列射頻前端是在上述基礎上進一步設計。如圖1所示,系統由4路構成。每一路信號鏈路包括低噪聲放大器(Low Noise Amplifier,LNA)、頻帶限制濾波器(Band Limiting Filter,BLF)、混頻器(MIXER)、鎖相環(Phase Locked Logic,PLL)、自動增益控制器(Automatic Gain Control,AGC)、中頻放大器(Amplifier,AMP)。
天線采用均勻直線陣列,將4路天線等間距排在一條直線上,結構簡單,仿真容易。設入射波長為λ,兩天線間距為d,光速為c,信源以γ角度入射到均勻直線陣列,如圖2所示。
當N個信源分別以入射角γ0,…,γN-1入射時,將M個陣元在k時刻的輸出表示為如下列矢量:
2 系統硬件電路設計
2.1 低噪聲放大器LNA
為了提高接收信號的靈敏度,在接收機的最前端采用低噪聲放大器。系統的噪聲系數F定義為輸入、輸出信噪比的比值:
式中,N為級聯的級數。由式(4)可知,最前端放大器的噪聲系數F1和增益G1對整個接收機的噪聲系數起決定作用[11]。低噪放的選擇需要考慮:線性范圍、反射系數、功耗、工作頻率、工作帶寬及通帶內的增益平坦。
低噪聲放大器件采用HMC478ST89,工作頻段廣,在1 GHz~2 GHz頻段內具有19 dB的固定增益而且噪聲系數只有3 dB。電路如圖3所示,Vs為供電電壓,RFIN為輸入信號,RFOUT為輸出信號。
器件的S參數如圖4所示,S21表示增益,在GPS L1頻段(1 575.42 MHz)為20 dB。在室外條件下,天線輸入GPS信號功率為-80~-60 dBm,經過低噪聲放大后,功率達到-60~-40 dBm,滿足系統設計要求。
2.2 頻帶限制濾波器BPF
為濾除衛星導航信號頻帶外的噪聲,一般在每級低噪聲放大器輸出端接入帶通濾波器BPF[12],也稱預選器,用來預選頻段,并抑制鏡像干擾、帶外干擾和各種噪聲[13]。本系統采用的是無源聲表面濾波器SF1186B,中心頻率為1 575.42 MHz,1 dB帶寬2.046 MHz,插入損耗最大3.5 dB。該器件頻響特性測試結果如圖5所示,在GPS L1頻段1.5 GHz左右,衰減為-2 dB左右,滿足系統設計要求。
2.3 GP2015模塊設計
GPS天線信號在經過放大、濾波之后,通過GP2015芯片下變頻到中頻信號。GP2015芯片具有低功耗、低成本、高可靠性的特點,工作電壓為3 V~5 V。該芯片包括:PLL(鎖相環)、三級混頻器、AGC(自動增益控制器)、中頻濾波器件以及兩位ADC(模數轉換器)。其內部詳細結構如圖6所示。
內部集成的PLL對基準時鐘進行倍頻,得到頻率為1 400 MHz的本振信號LO1。采用三級混頻結構,基準時鐘來自溫度補償晶振(TCXO)的10 MHz。外部輸入的GPS L1頻段1 575.42 MHz信號與LO1進行一級混頻,得到頻率為175.42 MHz差頻信號。經過LC濾波器后與LO2(140 MHz)進行二級混頻,得到35.42 MHz差頻信號。再通過聲表面波濾波器進入內部AGC電路與LO3(31.11 MHz)進行三級混頻,得到頻率為4.309 MHz信號。該中頻信號可通過內部2位A/D轉換器輸出兩位數字信號:符號(SIGN)和量級(MAG),分別表示信號的極性和大小,數字信號輸出給基帶處理器進一步處理;也可直接輸出模擬信號,供外部A/D采樣。本設計采用直接輸出模擬中頻信號的方式。
2.4 基準時鐘
本系統使用的GP2015器件要求10 MHz基準時鐘輸入,對頻率的精確度和穩定度要求都比較高。系統采用有源溫補晶振,頻率10 MHz,輸出功率8 dBm,諧波抑制-25 dB,雜波抑制-70 dB。具體電路如圖7所示。
2.5 中頻放大AMP
混頻以及各級濾波會導致信號衰減,但是后級A/D采樣需要中頻信號達到0 dBm。因此,在GP2015輸出端加上了一級中頻放大器。中頻放大器件是OPA698,它具有寬帶高線性、快速響應、低功耗、反饋型寬帶限壓放大特性,能夠實時調節電壓幅度輸出。
圖8所示為該器件的電路圖,輸入信號為VIN,輸出為Vo。通過調節反饋電壓VH/VL來控制增益變化,使輸出信號為0 dBm左右。
3 系統性能測試
國家自然科學基金項目委對該系統進行了測試,包括:單頻信號測試、GPS接收機測試。測試儀器:信號源Rohde&Schware(R&S)SMB100A Signal Generator,頻率范圍為9 kHz~6 GHz。V.KEL接收模塊:頻譜儀R&S FSC6.Spectrum Analyzer,頻率范圍為9 kHz~6 GHz。
3.1 單頻信號測試
利用信號發生器產生頻率為1 575.42 MHz、功率為-80 dBm的單頻信號,來模擬GPS L1頻段天線信號進行測試。該信號為四元天線陣列抗干擾射頻前端的輸入信號。
圖9所示為第一路輸出信號的頻譜圖(另3路輸出同圖9),頻率為4.309 MHz,帶內平坦度為0.2 dB,帶寬為3 MHz左右,信號功率為-2.8 dBm左右。該結果表明陣列GPS抗干擾射頻前端工作正常,滿足后級AD采樣的需求。
3.2 GPS接收機測試
為了使天線陣列抗干擾射頻前端應用于GPS接收系統中,搭建了GPS接收機測試平臺。如圖10所示,陣列射頻前端接入4路天線信號,接入GPS抗干擾基帶處理模塊,再通過上位機顯示收到衛星數據。
圖11所示為應用本接收前端后的衛星信號接收圖,共計10顆衛星,信噪比高達50 dB左右,符合通信系統指標要求。該結果表明,天線陣列抗干擾前端在干擾下能夠正常工作,系統設計可行。

4 結束語
本文設計了用于GPS接收機的天線陣列抗干擾射頻前端。文中對功放、濾波以及GP2015模塊進行了硬件電路設計,對系統進行了單頻信號測試、GPS接收測試。該設計投入使用后,能夠較好地處理陣列GPS信號,滿足設計要求。相比于目前通用的GPS信號射頻前端,它具有抗干擾性能強、電路簡單、可同時處理四路信號等優點,對GPS抗干擾技術的研究具有一定參考價值,同時能夠為北斗系統所用,在抗干擾方面有借鑒意義。
-
射頻
+關注
關注
104文章
5551瀏覽量
167581 -
gps
+關注
關注
22文章
2886瀏覽量
166055 -
抗干擾
+關注
關注
4文章
316瀏覽量
34552
發布評論請先 登錄
相關推薦
在WCDMA中LMS自適應天線陣的硬件實現
招聘抗干擾、差分導航算法工程師各一名
基于WCDMA技術規范的LMS自適應天線陣的硬件實現
一種采用線極化方式的小型化GPS錐面共形天線陣設計
射頻仿真系統的天線陣列怎么校準?
X波段柱面共形微帶天線陣的設計
自適應天線陣中相干信號的DOA估計
雙極化微帶天線陣的設計
WCDMA中LMS自適應天線陣的硬件實現

一種基于電磁超材料的抗干擾天線:波導縫隙抗干擾天線
基于超表面天線陣列的射頻前端與數字后端聯合抗干擾方案






 工商網監
工商網監
評論