 電氣工程師最喜歡用的編程方法
電氣工程師最喜歡用的編程方法
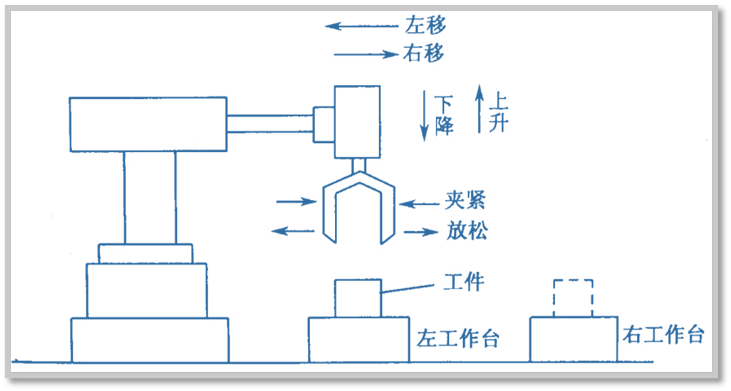
導讀:在自動化設備中,每個設備都有它的動作,比如先做什么后做什么,都是有一定的邏輯關系。就像我們在日常生活中,做事情也是需要有先后順序,這樣就比較有條理。比如吃飯之前是先洗手,洗完了之后吃飯,吃完了再洗碗。那在自動化行業中設備也要遵循一點的邏輯。就比如這個最常用的機械手動作(如圖1),它也是一步步將物料搬運到指定位置。針對動作邏輯,電氣工程師最喜歡用的編程方法就是“賦值比較法”。
那針對這種方法,我們可以使用一個案例來舉例說明。掌握其方法后,后續遇到這類的程序,你就可以直接套用!
控制要求:
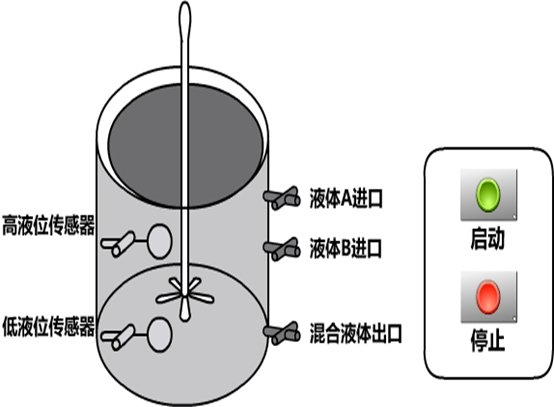
如圖所示為液體混合控制示意圖。液體混合控制器上有三個電磁閥(YV1-YV3)和一個攪拌機(M)進行控制。詳細控制要求如下所示:
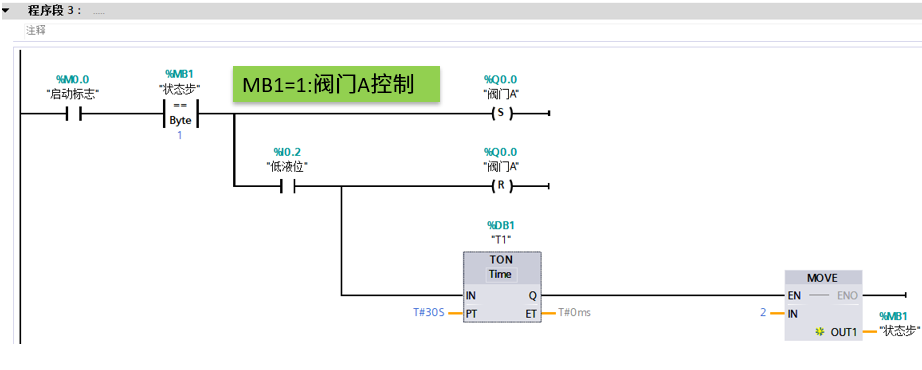
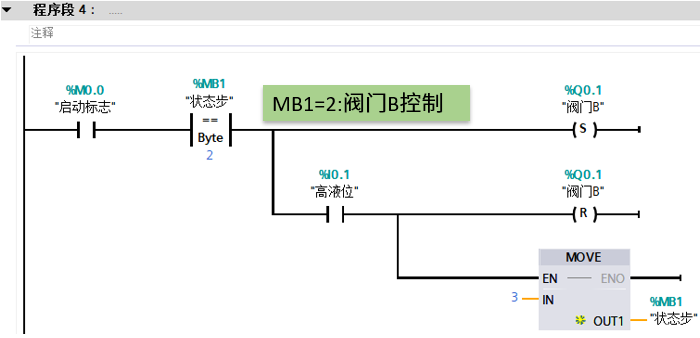
(1)按下啟動按鈕后,打開閥門A注入A液體,達到低液位感應器后停止注入A液體,穩液位30S后打開閥門B注入B液體,
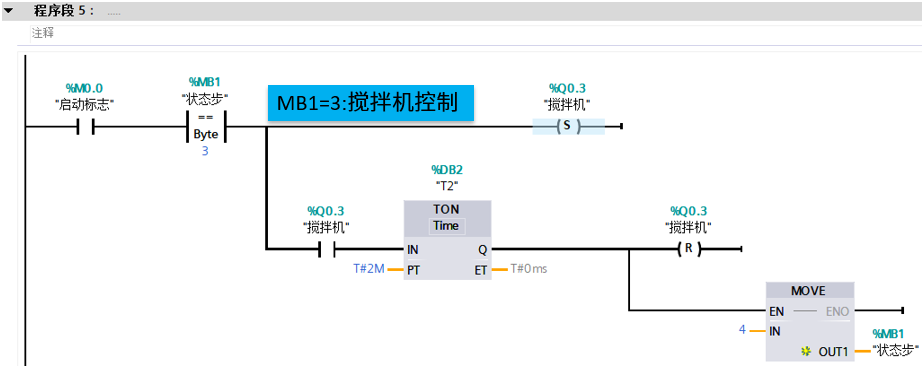
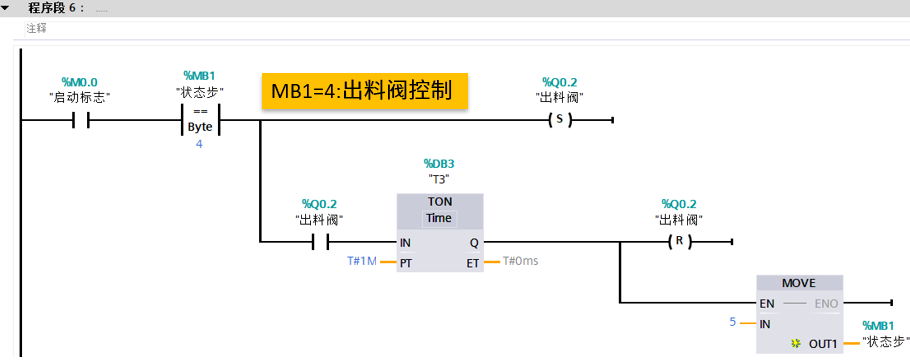
(2)當到達高液位后關閉閥門B,啟動攪拌機自動對混合液體進行2分鐘的攪拌,攪拌完成后讓混合液體從出料口流出;
(3)等待1分鐘后,混合液流盡,出料口關閉。
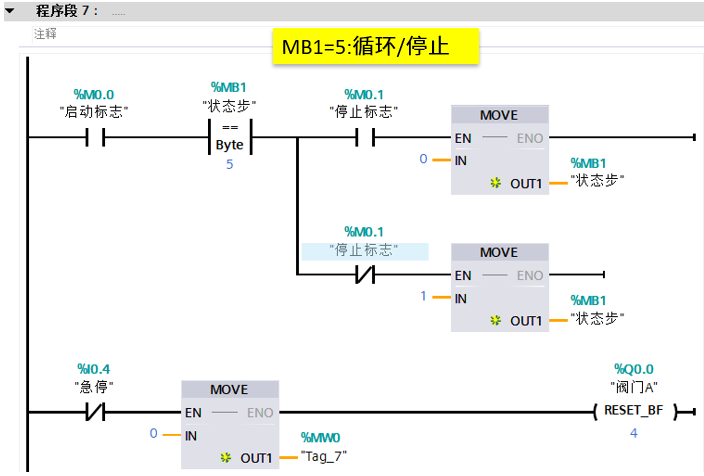
(4)按下停止按鈕后,防止液體凝固,必須完成一個周期后才進行停止
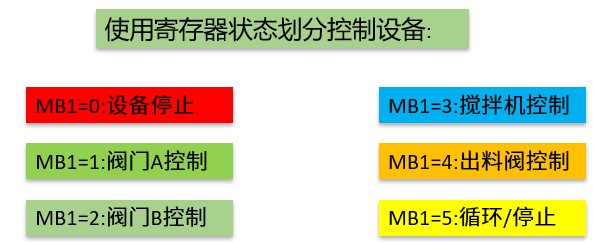
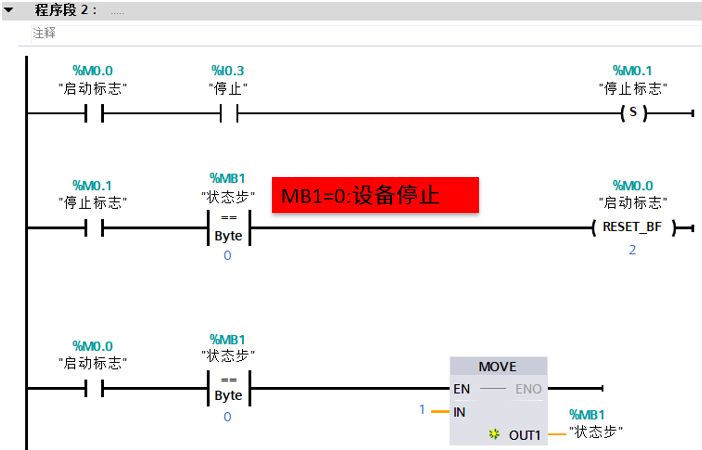
編程思路:使用寄存器實現步序劃分
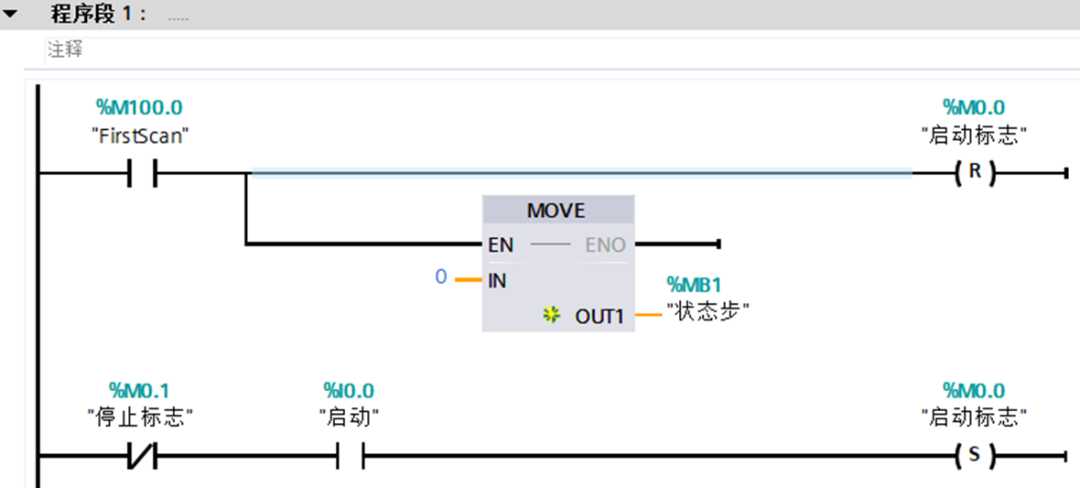
程序編寫:
在這個程序中,大家可以看到,它可以按照自己的步序去實現其功能,比如寄存器的值等于1時是閥門A控制,寄存器的值等于2時是閥門B控制,寄存器的值等于3時是攪拌器控制,依次類推。這種方法讓我們編程的思維更加清晰,不容易出錯,所以電氣工程師都比較喜歡使用。
值得注意的是:寄存器的賦值,最好有比較大的間距,比如賦值為0-5-10-15這種方式,這樣的目的是一旦中間哪個步序漏了方便插入。
審核編輯 黃宇
-
編程
+關注
關注
88文章
3592瀏覽量
93596 -
電氣工程師
+關注
關注
5文章
55瀏覽量
13308
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論