") ATA-7030高壓放大器在電致變形柔性致動器表情機器人實驗中的應用
ATA-7030高壓放大器在電致變形柔性致動器表情機器人實驗中的應用
實驗名稱:ATA-7030高壓放大器在電致變形柔性致動器表情機器人實驗中的應用
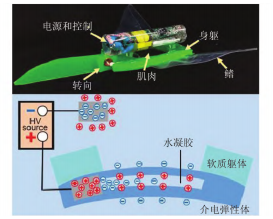
實驗內(nèi)容:該表情機器人的核心柔性器件是采用PVC凝膠電致伸縮柔性材料與不銹鋼金屬網(wǎng)狀電極層疊而成。在電場作用下,凝膠會發(fā)生蠕動變形,致使凝膠在電場下填入網(wǎng)狀電極的網(wǎng)孔內(nèi)部,從而發(fā)生厚度方向的伸縮運動。去電后回復原始狀態(tài)。通過ON-OFF的控制實現(xiàn)類似生物肌肉的伸縮運動。可以通過調(diào)整電場信號的波形和頻率可實現(xiàn)不同形式的變形運動。該過程需要通過功率放大器將電信號放大10-100倍,從而驅(qū)動各個柔性器件進行變形運動,從而實現(xiàn)表情機器人的不同表情的變化。
研究方向:基于智能材料的柔性器件設計
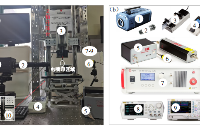
測試設備:ATA-7030高壓放大器、信號發(fā)生器、激光位移傳感器,示波器等。
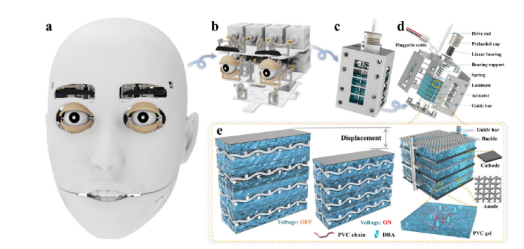
圖1:電致變形柔性致動器表情機器人
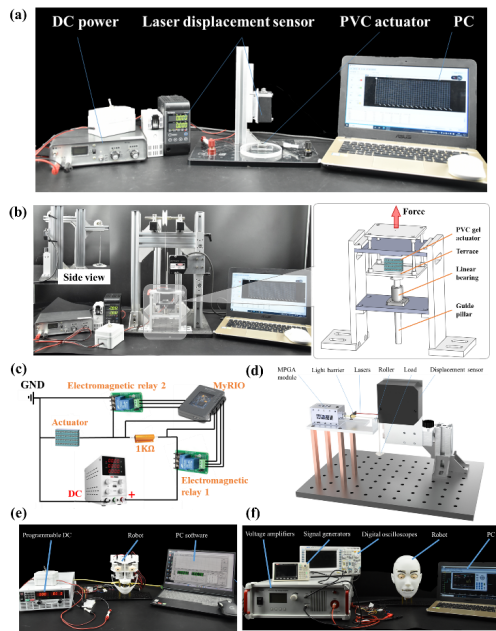
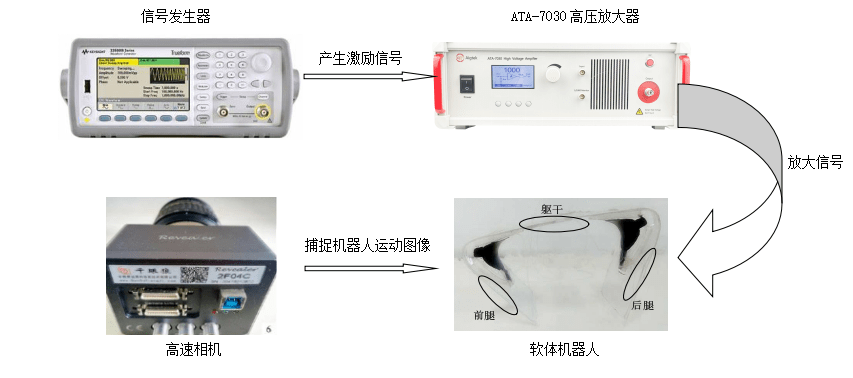
圖2:實驗裝置圖
實驗過程:
基于ATA-7030高壓放大器搭建了表情機器人的測試平臺。實驗設備包括信號發(fā)生器,ATA-7030高壓放大器,激光位移傳感器,示波器等。通過信號發(fā)生器將不同樣式和頻率的電信號(-10-10V)發(fā)送給ATA-7030高壓放大器,經(jīng)過50倍左右放大倍數(shù)輸入約500V左右的高壓驅(qū)動表情機器人各個模塊的柔性器件運動,從而實現(xiàn)機器人的不同表情的變化。
實驗結果:
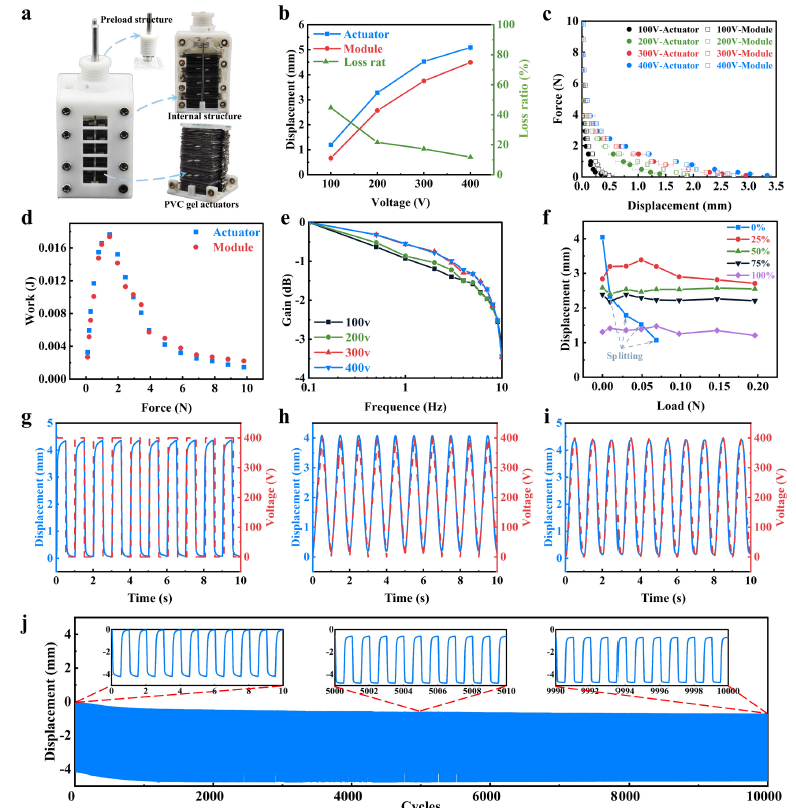
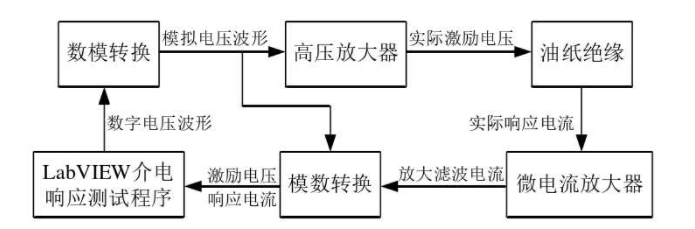
圖3:實驗參數(shù)變化圖
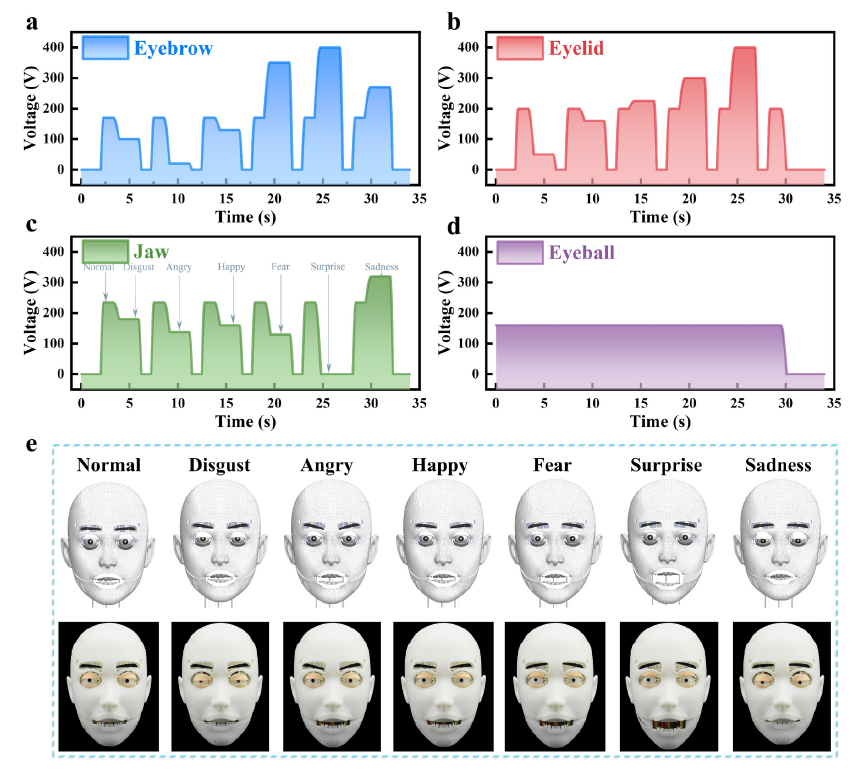
圖4:機器人不同表情變化圖
結果表明,ATA-7030功放能夠穩(wěn)定的放大不同類型和頻率的信號,從而實現(xiàn)柔性致動器件的不同形變以及最終實現(xiàn)表情機器人的不同表情。
結果表明,模塊化封裝前后的柔性驅(qū)動器具有同等的驅(qū)動特性,封裝后的位移減少僅為10%左右。同時,針對不同的輸入信號,驅(qū)動器的輸出位移的變化能較好地跟隨輸入電壓的變化,一萬次循環(huán)驅(qū)動后,柔性驅(qū)動器的位移損失僅為5%左右,具有較好的循環(huán)壽命。結果顯示ATA-7030功率放大器能夠穩(wěn)定的放大不同類型和頻率的輸入信號,具有響應快、放大倍數(shù)大以及輸出誤差小的特點,能滿足柔性驅(qū)動器的非規(guī)則定制化輸入信號的信號處理任務,從而實現(xiàn)柔性致動器件的不同形變,最終實現(xiàn)表情機器人的不同表情的變化。
功率放大器推薦:ATA-7030高壓放大器
圖:ATA-7030高壓放大器指標參數(shù)
西安安泰電子是專業(yè)從事功率放大器、高壓放大器、功率信號源、前置微小信號放大器、高精度電壓源、高精度電流源等電子測量儀器研發(fā)、生產(chǎn)和銷售的高科技企業(yè),為用戶提供具有競爭力的測試方案。Aigtek已經(jīng)成為在業(yè)界擁有廣泛產(chǎn)品線,且具有相當規(guī)模的儀器設備供應商,樣機都支持免費試用。
-
機器人
+關注
關注
210文章
28231瀏覽量
206614 -
信號發(fā)生器
+關注
關注
28文章
1456瀏覽量
108662 -
高壓放大器
+關注
關注
4文章
475瀏覽量
14348
發(fā)布評論請先 登錄
相關推薦
揭秘!高壓放大器究竟是如何在壓電陶瓷致動器中應用的??
安泰電子ATA-2000電壓放大器應用案例
功率放大器基于振動驅(qū)動的旋轉(zhuǎn)及攀爬軟體機器人的研究
【案例分享】ATA-2041功率放大器在電致瞬態(tài)光譜系統(tǒng)中的應用
功率放大器在驅(qū)動介電彈性體機器人的應用

ATA-7030高壓放大器在壓電薄膜傳感器驅(qū)動中的應用
ATA-7030高壓放大器在介電領域研究中的應用(合集)
ATA-7030高壓放大器在等離子體實驗中的應用有哪些
基于雙邊介電彈性體致動器的肌肉啟發(fā)軟體機器人設計

安泰ATA-7030高壓放大器在介電彈性體智能材料中的應用
ATA-7030高壓放大器在電流體噴印實驗系統(tǒng)中的應用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論