") 如何使用PID進(jìn)行溫度控制
如何使用PID進(jìn)行溫度控制
PID(比例-積分-微分)控制器在溫度控制系統(tǒng)中扮演著至關(guān)重要的角色。以下是使用PID進(jìn)行溫度控制的基本步驟和原理:
一、PID控制原理
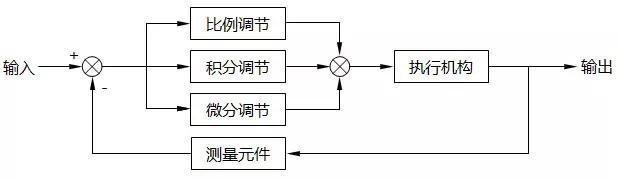
PID控制器的核心思想是根據(jù)系統(tǒng)當(dāng)前的狀態(tài)(即偏差)和過去的狀態(tài)(即偏差的積分和微分),預(yù)測未來的狀態(tài),并據(jù)此調(diào)整控制量,使系統(tǒng)輸出能夠快速、準(zhǔn)確地跟蹤設(shè)定值。在溫度控制系統(tǒng)中,PID控制器通過調(diào)整加熱或冷卻設(shè)備的輸出,使實(shí)際溫度快速而穩(wěn)定地達(dá)到設(shè)定值。
- 比例(P)控制 :
- 根據(jù)誤差(設(shè)定溫度與實(shí)際溫度之差)的大小產(chǎn)生相應(yīng)的控制作用。
- 誤差越大,控制作用越強(qiáng),以迅速減小穩(wěn)態(tài)誤差。
- 積分(I)控制 :
- 對誤差進(jìn)行積分,以消除靜差(即穩(wěn)態(tài)誤差)。
- 只要誤差存在,積分控制器就不斷地積累輸出控制量,直到誤差為零。
- 微分(D)控制 :
- 反映誤差的變化趨勢,提前產(chǎn)生控制作用。
- 有助于減小超調(diào)量,克服振蕩,提高系統(tǒng)的穩(wěn)定性。
二、使用PID進(jìn)行溫度控制的步驟
- 確定控制目標(biāo) :
- 明確溫度控制系統(tǒng)的設(shè)定值,即期望達(dá)到的溫度。
- 選擇PID控制器 :
- 根據(jù)控制系統(tǒng)的具體需求和特點(diǎn),選擇合適的PID控制器。
- 配置PID參數(shù) :
- 根據(jù)經(jīng)驗(yàn)或?qū)嶒?yàn)數(shù)據(jù),調(diào)整PID控制器的比例增益(Kp)、積分增益(Ki)和微分增益(Kd)參數(shù)。
- 這些參數(shù)的調(diào)整將直接影響溫度控制的精度和穩(wěn)定性。
- 連接傳感器和執(zhí)行器 :
- 將溫度傳感器連接到控制系統(tǒng),以實(shí)時獲取實(shí)際溫度信息。
- 將執(zhí)行器(如加熱器、冷卻器等)連接到控制系統(tǒng),以便根據(jù)PID控制器的輸出調(diào)整加熱或冷卻功率。
- 啟動控制系統(tǒng) :
- 設(shè)定初始條件,并啟動控制系統(tǒng)。
- 控制系統(tǒng)將根據(jù)PID算法計算控制量,并輸出到執(zhí)行器。
- 監(jiān)控和調(diào)整 :
- 實(shí)時監(jiān)控系統(tǒng)運(yùn)行狀況,觀察溫度變化情況。
- 如有必要,根據(jù)系統(tǒng)實(shí)際表現(xiàn)調(diào)整PID參數(shù),以優(yōu)化控制效果。
三、注意事項
- 選擇合適的傳感器和執(zhí)行器 :
- 確保傳感器和執(zhí)行器的精度和穩(wěn)定性滿足控制要求。
- 合理設(shè)置PID參數(shù) :
- PID參數(shù)的調(diào)整需要經(jīng)驗(yàn)和實(shí)驗(yàn)數(shù)據(jù)的支持。
- 在實(shí)際應(yīng)用中,可能需要進(jìn)行多次調(diào)整和優(yōu)化。
- 考慮系統(tǒng)滯后和慣性 :
- 溫度控制系統(tǒng)通常具有一定的滯后和慣性。
- 在調(diào)整PID參數(shù)時,需要充分考慮這些因素對控制效果的影響。
- 監(jiān)控和報警 :
- 設(shè)置監(jiān)控系統(tǒng)以實(shí)時觀察溫度變化情況。
- 在溫度超出設(shè)定范圍時,及時發(fā)出報警并采取相應(yīng)的措施。
通過以上步驟和注意事項,可以使用PID控制器實(shí)現(xiàn)溫度控制的精確和穩(wěn)定。在實(shí)際應(yīng)用中,可能還需要根據(jù)具體情況進(jìn)行進(jìn)一步的優(yōu)化和調(diào)整。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
溫度控制
+關(guān)注
關(guān)注
7文章
284瀏覽量
36570 -
PID
+關(guān)注
關(guān)注
35文章
1471瀏覽量
85306 -
冷卻器
+關(guān)注
關(guān)注
0文章
85瀏覽量
11911
發(fā)布評論請先 登錄
相關(guān)推薦
如何使用Python實(shí)現(xiàn)PID控制
PID控制(比例-積分-微分控制)是一種常見的反饋控制算法,廣泛應(yīng)用于工業(yè)控制系統(tǒng)中。在Python中實(shí)現(xiàn)
基于PID控制的溫度調(diào)節(jié)系統(tǒng)
溫度調(diào)節(jié)系統(tǒng)在工業(yè)生產(chǎn)和科學(xué)研究中扮演著重要角色。基于PID控制的溫度調(diào)節(jié)系統(tǒng)因其簡單、高效和可靠性而受到青睞。 1. 引言 在許多工業(yè)過程中,維持恒定的
如何調(diào)節(jié)PID參數(shù) PID控制器的調(diào)試方法
控制器通過計算誤差信號(期望值與實(shí)際值之差)的比例、積分和微分來調(diào)整控制量,以減少誤差并實(shí)現(xiàn)系統(tǒng)的穩(wěn)定。比例項(P)對當(dāng)前誤差進(jìn)行響應(yīng),積分項(I)對過去累積的誤差進(jìn)行響應(yīng),而微分項(
在焊接中應(yīng)用PID控制技術(shù)
,從而提高焊接質(zhì)量。 2. PID控制技術(shù)原理 PID控制技術(shù)由比例(P)、積分(I)和微分(D)三個基本環(huán)節(jié)組成。比例環(huán)節(jié)根據(jù)偏差的大小進(jìn)行
PID控制器的類型和選擇指南
(Derivative)三個單詞的首字母縮寫。 PID控制器的類型 基本PID控制器 比例(P)控制器 :僅考慮當(dāng)前偏差,對偏差
什么是PID控制與傳統(tǒng)控制的區(qū)別
在自動化控制系統(tǒng)中,PID控制(比例-積分-微分控制)是一種廣泛應(yīng)用的控制算法。它以其簡單、魯棒和易于實(shí)現(xiàn)的特點(diǎn),在工業(yè)和工程領(lǐng)域中占據(jù)了重
PID在工業(yè)控制領(lǐng)域的應(yīng)用
進(jìn)行控制,使系統(tǒng)能夠快速、準(zhǔn)確地達(dá)到期望狀態(tài)。本文將詳細(xì)探討PID在工業(yè)控制領(lǐng)域的應(yīng)用,包括其基本原理、應(yīng)用場景、優(yōu)勢以及未來發(fā)展趨勢。
什么是PID控制器?有哪些作用?
在現(xiàn)代工業(yè)自動化控制系統(tǒng)中,PID(比例-積分-微分)控制器無疑是最常見且重要的控制算法之一。PID控制
PID溫度控制手冊
使用連續(xù)或脈沖控制信號來控制溫度過程。您可以設(shè)置參數(shù),啟用或禁止 PID 控制器的子功能,以便使其和要控
發(fā)表于 05-06 09:30
?1次下載
什么是pid控制,其控制作用是什么
信號進(jìn)行比例、積分和微分運(yùn)算,從而實(shí)現(xiàn)系統(tǒng)的穩(wěn)定控制和性能優(yōu)化。 PID控制器由三個部分組成:比例控制器(P),積分
什么是pid控制原理 pid各個參數(shù)對系統(tǒng)的影響
PID(Proportional-Integral-Derivative)控制是一種常見的控制算法,廣泛應(yīng)用于工業(yè)過程控制、機(jī)器人控制、自動
詳解PID回路控制方案
在實(shí)際工程中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡稱PID控制,又稱PID調(diào)節(jié)。
采用PID算法的智能溫度控制器
采用PT100精密測溫電阻作為溫度傳感器,將其采集到的溫度數(shù)據(jù)傳輸至單片機(jī)進(jìn)行轉(zhuǎn)換,再由單片機(jī)進(jìn)行PID

何為PID?為何需要PID?PID能達(dá)到什么作用?
于工業(yè)自動化控制系統(tǒng)中,通過不斷測量被控對象輸出的實(shí)際值與期望值之間的差別,并對控制信號進(jìn)行調(diào)節(jié),最終使被控對象能夠穩(wěn)定地達(dá)到期望值。 PID控制





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論