 康謀技術 | 高效環境感知:毫米波雷達數據采集、可視化及存儲方案
康謀技術 | 高效環境感知:毫米波雷達數據采集、可視化及存儲方案
隨著自動駕駛技術的快速發展,自動駕駛的研發逐漸形成一整套的流程,包括數據采集,清洗標注,算法訓練,仿真測試到量產等各技術環節。通過復雜的步驟從原始數據中提出高價值的信息,其中對原始數據的精準采集是實現車輛環境感知的基石。毫米波雷達因其出色的測距、測速能力以及對惡劣天氣的魯棒性,成為不可或缺的傳感器之一。
本文將以4D毫米波雷達ARS548為例,分享毫米波雷達如何快速實現數據采集,可視化及存儲策略。關于毫米波雷達的特性可進一步了解文章《毫米波雷達技術解析》。
一、ARS548毫米波雷達概述
ARS548是 4D高分辨率成像毫米波雷達(4D High Resolution Radar),如圖1所示。它能夠有效的測量距離(Range),速度(Velocity),水平角度(Azimuth)和俯仰角度或高度(Elevation)四個維度的信息,具備感知目標三維空間位置能力。具備以下特性:
 圖1:ARS548(圖片來源于網絡)
圖1:ARS548(圖片來源于網絡)1.探測距離與視場角:最大探測距離可達300米,水平視場角為±60°,垂直視場角為±4°至±14°。
2.數據輸出:支持最多800個Detection和50個Object的同時輸出,測量周期為50ms至100ms可調。
3.接口:采用100 BASE-T1接口,支持通過車載以太網轉換器與標準以太網設備進行通信。
4.通信協議:數據通過UDP協議傳輸,使用多播地址方式進行數據傳輸。
二、硬件集成
為了能快速采集到毫米波雷達的數據,需要對其進行硬件集成與連接,如圖2所示。
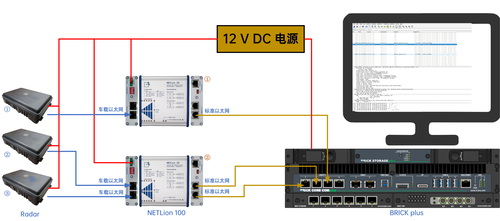 圖2:Radar 硬件連接方案
圖2:Radar 硬件連接方案以同時連接3個毫米波雷達為例,整個系統均支持12V的供電運行,可快速實現各設備穩定供電運行。在數據鏈路采集上,需要將車載以太網接口的數據轉換到標準以太網,這一轉換過程涉及以下步驟:
1. 網口轉換:使用如康謀NETLion100轉換器,將車載以太網信號轉換為標準以太網信號。NETLion100集成了網絡分線器(Tap)和雙介質轉換器于一身,支持BroadR-Reach?網絡信號與100BASE-TX以太網之間的雙向轉換,并提供LED信號實時顯示數據傳輸質量,可快速進行數據轉換和分析。
2. 數據傳輸原理:雷達數據以UDP包的形式發送至指定的多播地址,康謀BRICK plus設備通過網絡接口接收這些數據包。BRICKplus提供廣泛的接口支持多個傳感器同時連接,實現高帶寬數據的采集、處理和記錄。
3. 采集與監控:在BRICK plus端,可以使用Wireshark等網絡分析工具來捕獲和分析從雷達發送的數據包,檢查數據包是否正確傳輸。
三、軟件開發
為了采集到毫米波雷達輸出的點云數據,需要理解數據的傳輸形式并能夠實時解析。具體來說需要解決如下的問題:
1.數據采集:實時從ARS548雷達獲取原始數據,這要求系統能夠與雷達硬件接口進行高效通信,并且能夠處理高頻率的數據流。
2.數據解析:將原始數據轉換為可讀的格式,如目標的距離、速度和角度。需要對雷達數據包進行解碼,并提取出有用的信息。
3.數據可視化:將解析后的數據以圖形化的方式展示,便于分析和監控。需要實時更新數據顯示。
ROS提供了模塊化的節點系統,便于管理和擴展。每個節點可以獨立開發和測試,使得系統的整體復雜性得到有效管理。十分契合我們對問題的拆解以及功能節點的完成。此外采用ROS的發布/訂閱模型可以實時采集傳輸的雷達數據。
對于單個毫米波雷達的采集,解析和可視化,可以通過在ROS中對應創建3個節點來實現。3個節點分別負責Radar設備接收UDP數據,解析并發布ROS消息,以及將雷達檢測和對象信息轉換為可視化Marker消息。
針對3(多)個毫米波雷達的同時采集,我們采用每個節點同時發布和訂閱多個topic數據實現同時采集和傳輸。并且為了實現多個雷達數據的同時顯示,采用Foxglove進行可視化呈現,呈現效果如圖3所示:
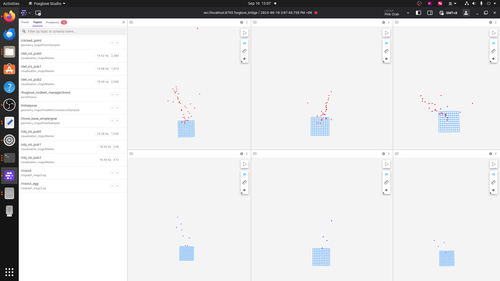 圖3 :Radar 可視化
圖3 :Radar 可視化隨后,采用ROSbag進行數據存儲,能夠確保數據的完整性和準確性。
四、總結
通過集成高性能的硬件設備和采用ROS框架,實現了毫米波雷達數據的高效采集、實時處理和直觀可視化,同時支持多雷達系統的數據同步采集和存儲,提供了一個穩定、靈活且可擴展采集方案。
-
傳感器
+關注
關注
2548文章
50664瀏覽量
751939 -
數據采集
+關注
關注
38文章
5903瀏覽量
113513 -
自動駕駛
+關注
關注
783文章
13682瀏覽量
166137 -
毫米波雷達
+關注
關注
106文章
1029瀏覽量
64237 -
汽車
+關注
關注
13文章
3416瀏覽量
37164
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論