 廣東工業大學:用于健康監測和機器人技術的柔性自供電觸覺傳感最新進展
廣東工業大學:用于健康監測和機器人技術的柔性自供電觸覺傳感最新進展
在現代科技時代,將傳感功能集成到健康監測系統和機器人平臺中已成為提高人類生活和工業效率的一種變革性方法。材料科學、電子工程和跨學科合作正在推動柔性電子技術的快速發展,與此同時,健康監測、人機交互、機器人等領域對可穿戴式觸覺傳感器的需求也在不斷增長。這些應用場景要求觸覺傳感器具有高靈敏度和長期穩定工作能力。然而,驅動可穿戴傳感器需要額外的電源,這會降低傳感系統的靈活性,增加重量,從而降低佩戴體驗。因此,從生物運動和環境中獲取能量已成為替代傳統電源的一種前景廣闊的方法。特別是自供電觸覺傳感技術,由于能夠通過將機械能轉化為電能來產生自身的工作電源,因此在各種傳感技術中脫穎而出。這對于需要連續運行的健康監測設備和自主發電對獨立運行至關重要的機器人技術尤為重要。
觸覺是人類感知世界的基本方式之一,而觸覺傳感器則是模仿人類觸覺功能的人工設備,它們可以將機械刺激轉化為電信號,從而實現對環境的感知和控制。隨著技術的不斷發展,自供電觸覺傳感器受到了廣泛關注。這不僅是因為它們具有能源自主性,可大大降低能源短缺對設備使用的影響,還因為它們的觸覺傳感能力將實現更精細、更人性化的感知模式。因此,近十年來開發出了大量自供電柔性觸覺傳感器,并廣泛應用于健康和運動監測機器人、生物醫學等領域。觸覺傳感器的性能和可靠性取決于其傳感機制和結構設計。摩擦起電式傳感器和壓電式傳感器可通過采集機械能和檢測動態壓力實現自供電。電容式和壓阻式傳感器具有較大的動態和靜態壓力檢測范圍,但需要電源,從而增加了重量,降低了觸覺傳感系統的靈活性。盡管壓阻傳感器因其工作機制而需要外部電源才能工作,但通過與自供電電子元件相結合,它們可以實現自供電。
作為現代醫療保健的重要組成部分,健康監測的發展不僅促進了對最新數據的依賴,而且還需要管理和處理越來越多的數據。如何實時、準確、非侵入式地獲取和處理數據已成為健康監測領域的一大挑戰。自供電觸覺傳感器可以巧妙地集成到可穿戴設備中,對心跳、血壓呼吸和運動等人體健康狀況進行無創監測,這對長期健康管理和疾病預防至關重要。這也意味著需要確保傳感器準確捕捉微弱的生理信號,這對確保監測數據的可靠性至關重要。此外,還需要高效的算法來處理和分析收集到的大量數據,從而提供實時、準確的健康反饋。傳統的供電方法需要內置電池或頻繁連接外部電源進行充電,這既增加了相關設備的重量和體積,也限制了設計的靈活性和持續的能源供應。因此,自供電傳感技術的應用是克服這一障礙的有效手段。通過將人體肢體運動、心肺運動和血液流動產生的生物力學能量轉化為電能,減少了對傳統電池的依賴,提高了便利性,并使長時間監測成為可能。同樣,現代機器人技術也面臨著類似的挑戰。隨著機器人應用領域的擴大,對更精細的運動控制、感知以及在非結構化環境中對環境的理解提出了更高的要求。通過利用環境能源,這項技術有助于減少機器人對外部能源的依賴,提高機器人在無人環境中自主運行的能力。然而,在復雜的操作環境中,傳感器必須足夠耐用和可靠,以確保長時間穩定運行。自供電觸覺傳感器以其實時檢測生理信號的獨特能力滿足了這些需求,為機器人技術的發展提供了新的動力。
研究成果
過去幾十年來,觸覺傳感技術在健康監測和機器人領域取得了長足的進步。與傳統傳感器相比,自供電觸覺傳感器無需外部電源驅動,使整個系統更加靈活輕便。因此,自供電觸覺傳感器是模擬可穿戴健康監測觸覺感知功能的理想選擇,也是智能機器人理想的電子皮膚(e-skin)。廣東工業大學孫啟軍教授團隊在這篇綜述中首先介紹了各種自供電觸覺傳感平臺的工作原理、材料和設備制造策略。然后介紹了它們在健康監測和機器人技術中的應用。最后,討論了自供電觸覺傳感系統的未來前景。相關報道以“Recent Progress on Flexible Self-Powered Tactile Sensing Platforms for Health Monitoring and Robotics”為題發表在Small期刊上。
圖文導讀
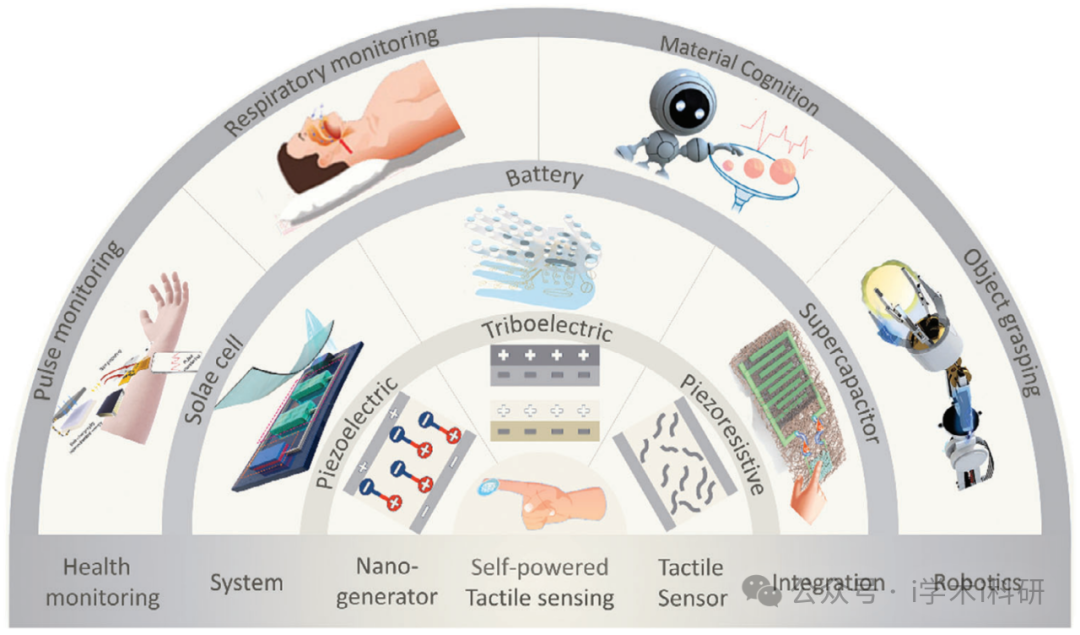
Figure 1. Overview of working mechanisms, system integration, and applications of self-powered tactile sensing.
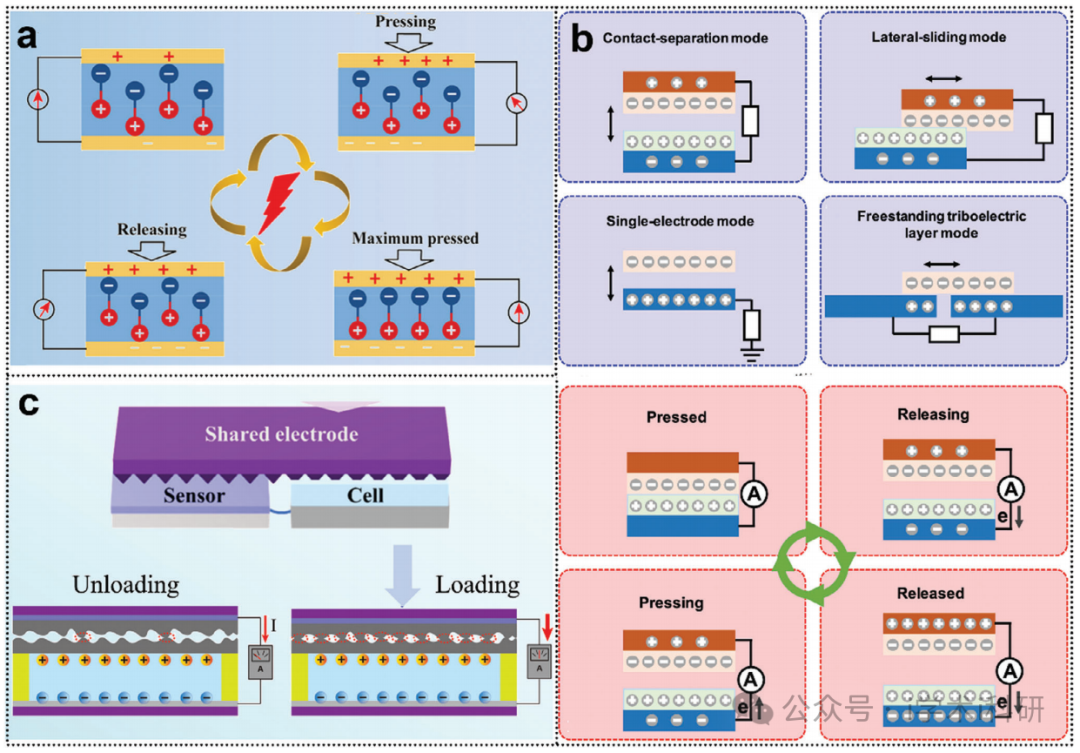
Figure 2. Working mechanism of self-powered tactile sensors.
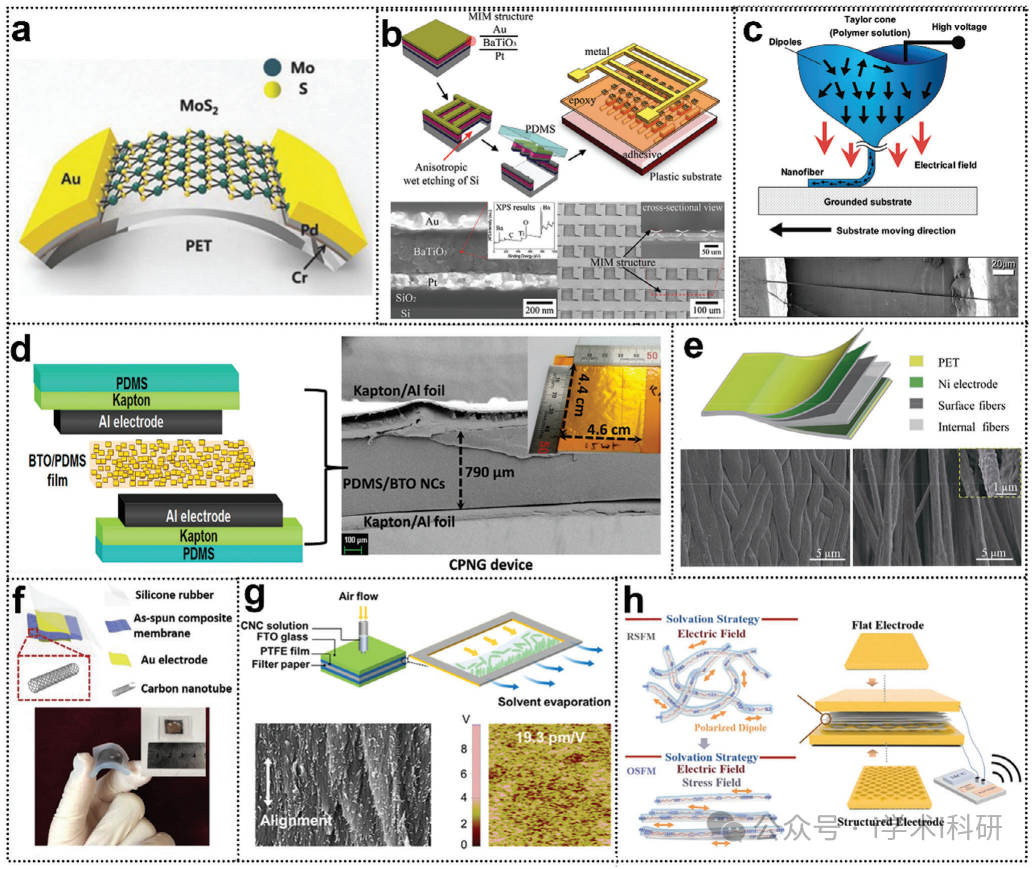
Figure 3. Materials and device structure of piezoelectric tactile sensors.
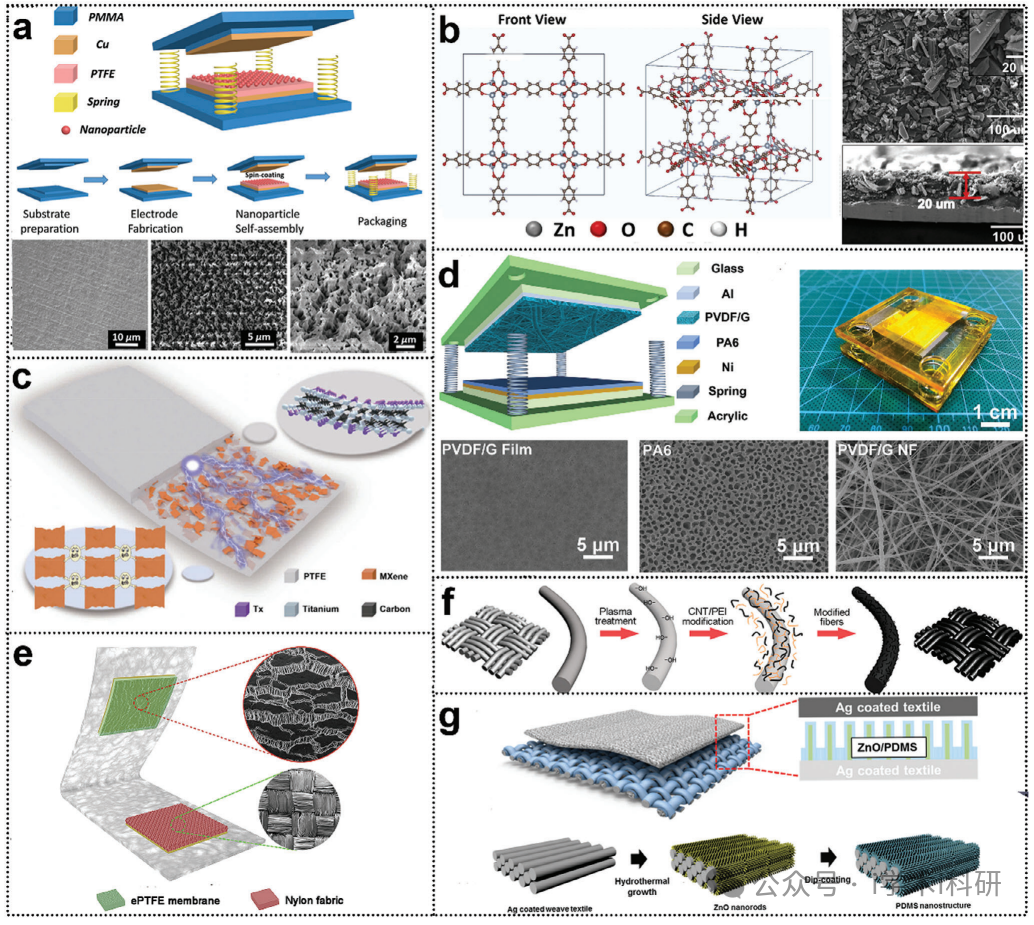
Figure 4. Materials and device structure of triboelectric tactile sensors.
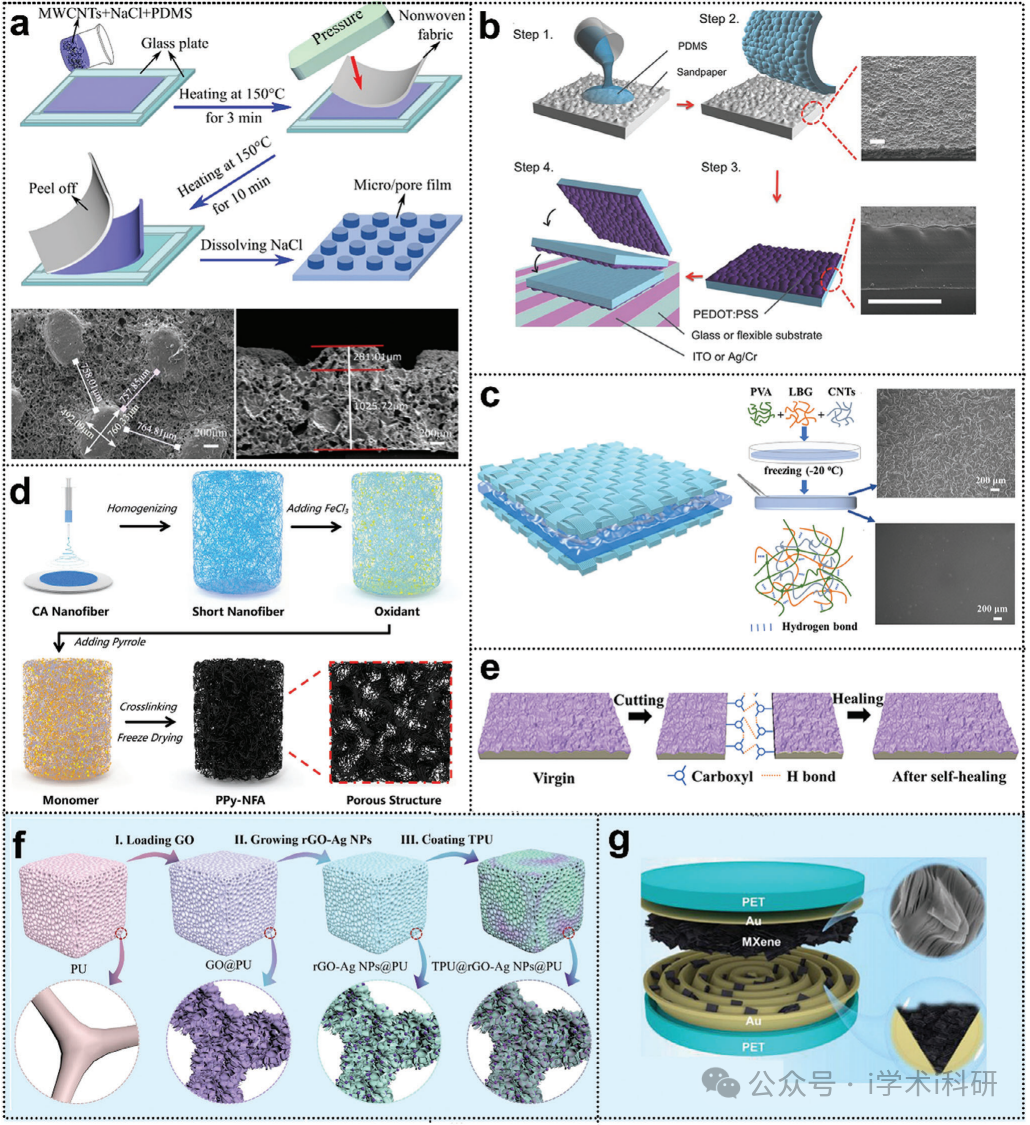
Figure 5. Materials and device structure of piezoresistive tactile sensors.
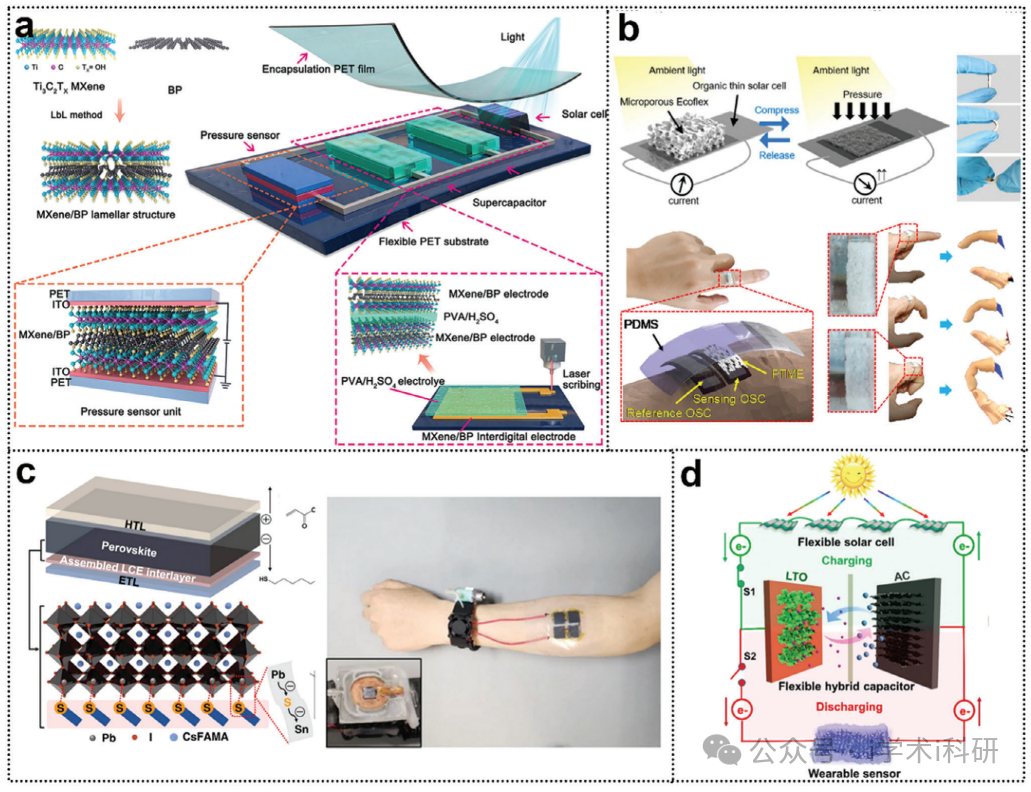
Figure 6. Self-powered tactile sensing systems combined with solar cells.
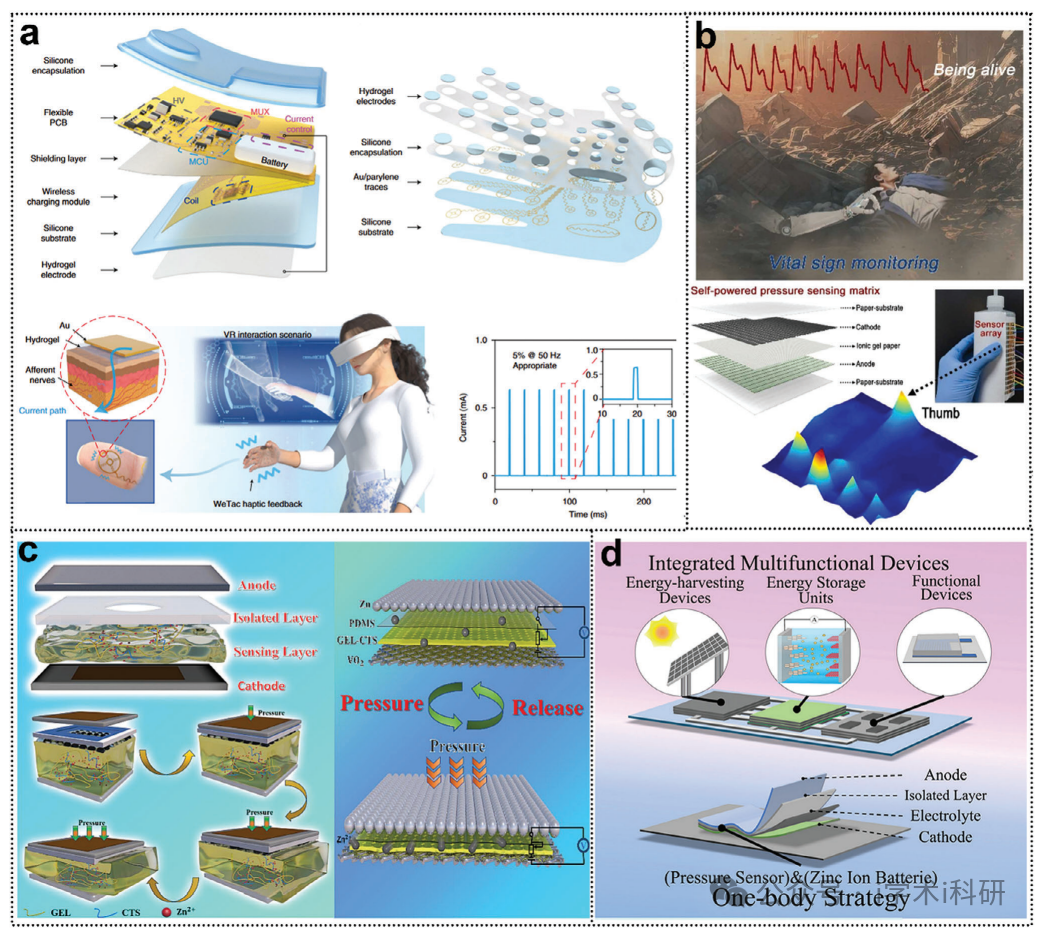
Figure 7. Self-powered tactile sensing systems combined with batteries.
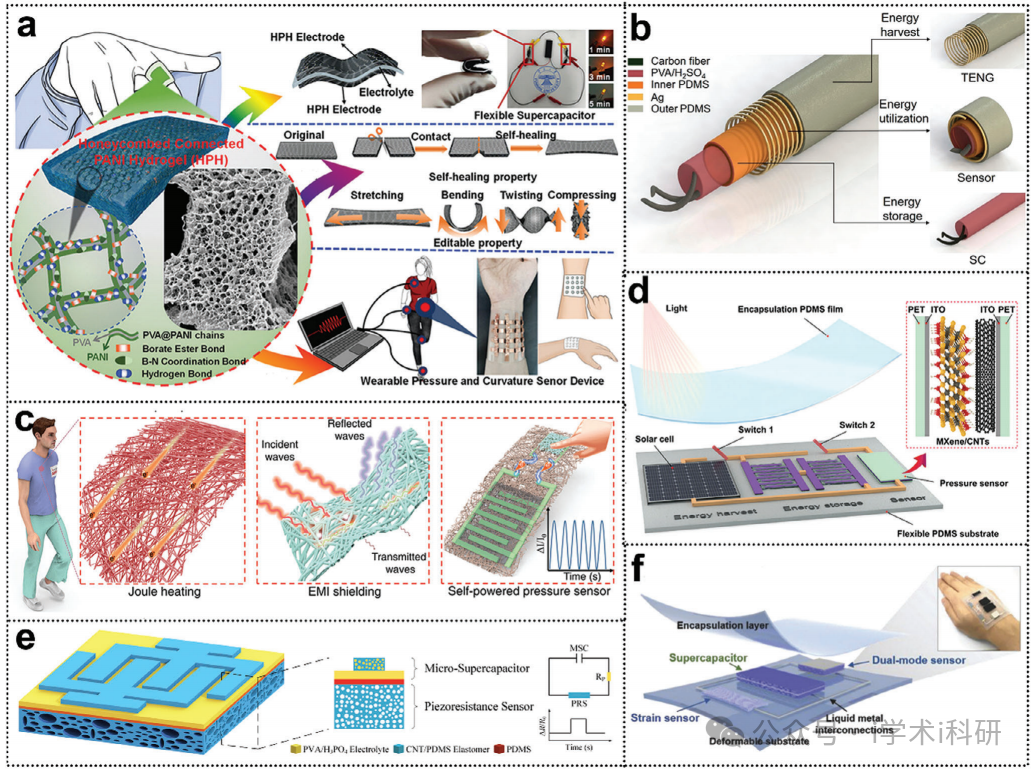
Figure 8. Self-powered tactile sensing systems combined with supercapacitors.
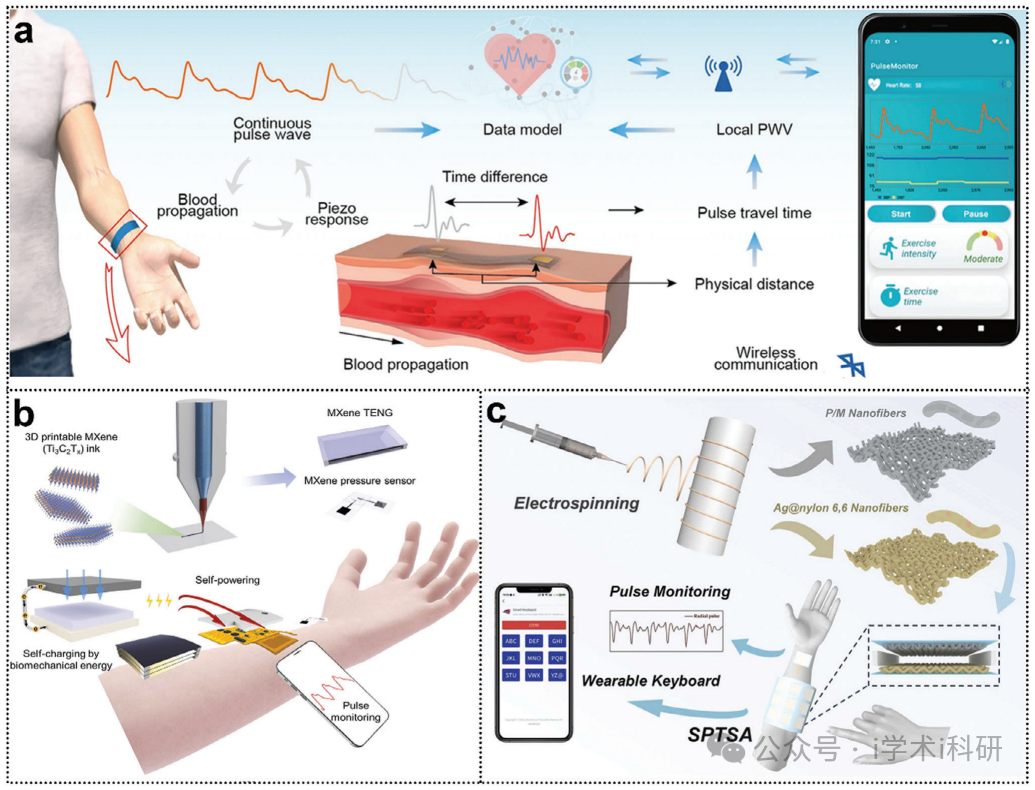
Figure 9. Self-powered tactile sensing for blood pressure and pulse monitoring.
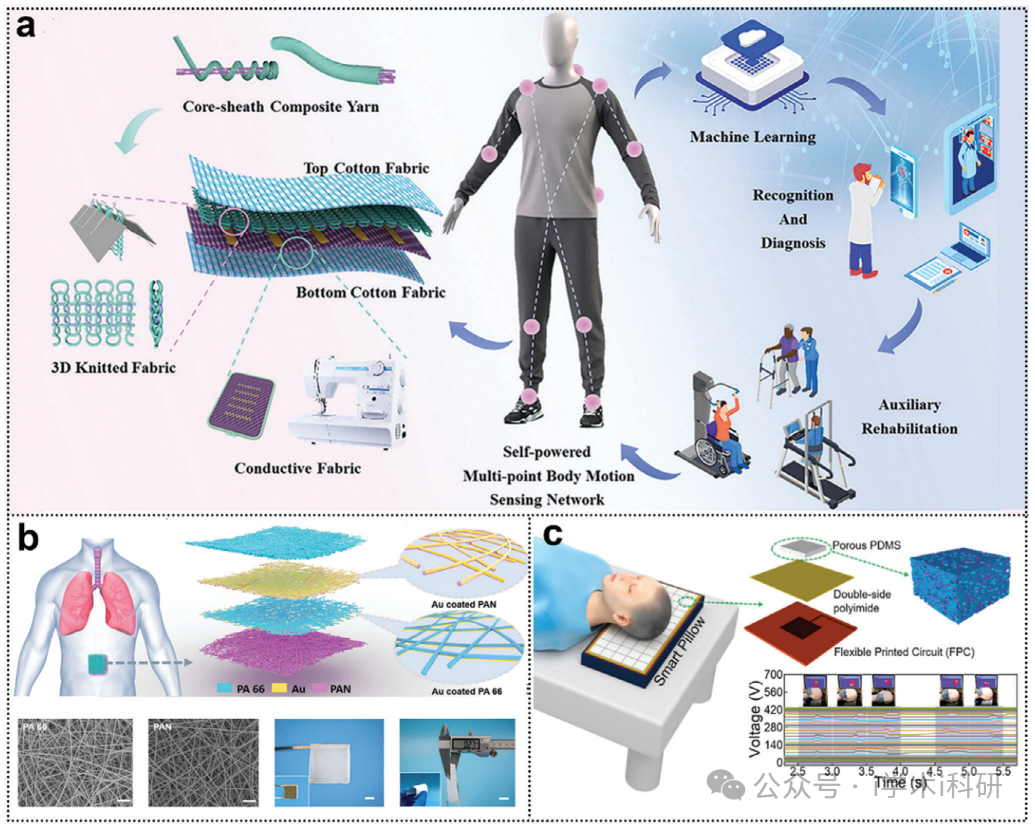
Figure 10. Self-powered tactile sensing for gait, respiratory and sleep monitoring.
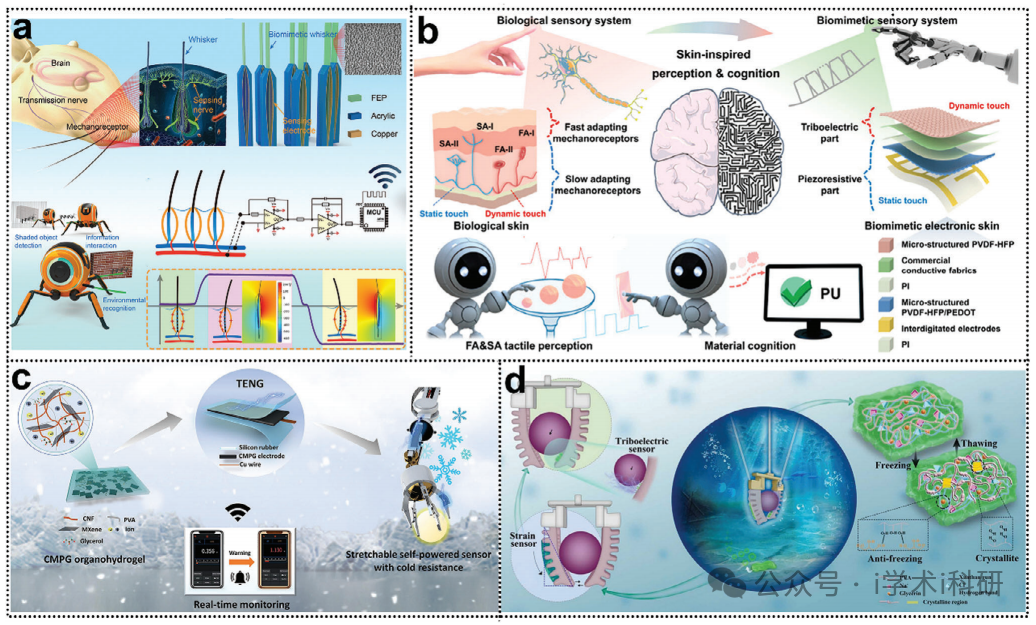
Figure 11. Self-powered tactile sensing for environment recognition, object recognition and grasping.
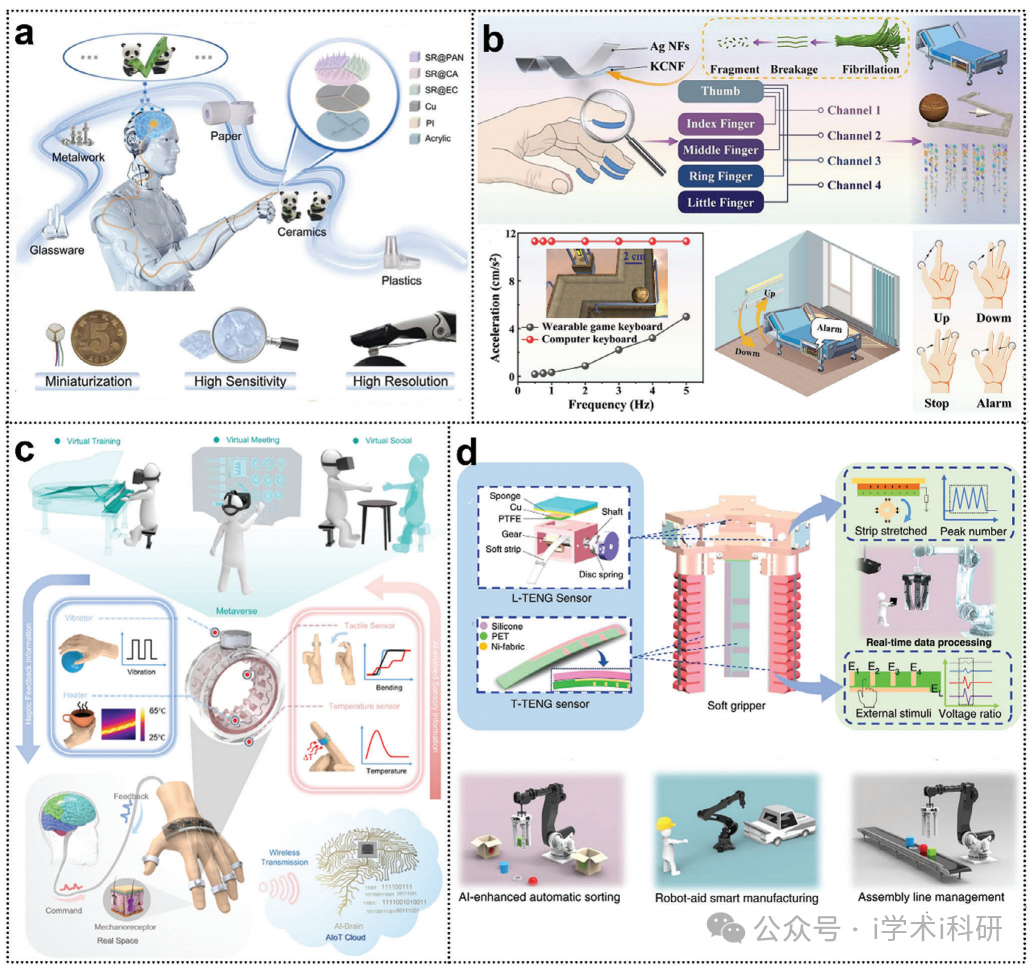
Figure 12. Self-powered tactile sensing for object material recognition, HMI and VR.
來源: i學術i科研
文獻鏈接 Recent Progress on Flexible Self-Powered Tactile Sensing Platforms for Health Monitoring and Robotics https://doi.org/10.1002/smll.202405520
聲明:轉載此文是出于傳遞更多信息之目的,若有來源標注措誤或侵犯了您的合法權益,請與我們聯系,我們將及時更正、刪除,謝謝。
-
觸覺傳感
+關注
關注
0文章
10瀏覽量
8192 -
機器人技術
+關注
關注
18文章
191瀏覽量
31611 -
健康監測
+關注
關注
1文章
91瀏覽量
24923 -
柔性傳感
+關注
關注
1文章
11瀏覽量
2072
發布評論請先 登錄
相關推薦
風光互補技術及應用新進展
風光互補技術原理及最新進展
粵嵌教育嵌入式技術入門與提高講座在廣東工業大學隆重舉
隨用隨充充電貼膜出自廣東工業大學學生之手
車聯網技術的最新進展
柔性可穿戴電子器件的最新進展
工業機器人市場的最新進展淺析
配天機器人的技術最新進展及發展方向
哈爾濱工業大學研究人員設計出了一款新型的柔性機器人






 工商網監
工商網監
評論