 智駕行業正在面臨哪些變化?
智駕行業正在面臨哪些變化?
智能駕駛技術快速發展,促使汽車行業經歷巨大變革。從最初的概念驗證階段,到現在的實際場景落地,智能駕駛逐漸從創新型行業向工程型行業轉型。特斯拉作為智能駕駛的先鋒,正引領了這一行業的發展,其“重算法、輕硬件”的路線對全球廠商產生了巨大影響。而隨著技術逐漸成熟,國內廠商在感知系統、數據閉環及自動駕駛功能商業化等方面不斷突破,推動智能駕駛技術的逐步普及。
智能駕駛行業的演變
1.1 創新型行業階段
2010年至2020年,智能駕駛技術處于創新型行業的探索階段,特斯拉、Waymo等企業通過技術創新,不斷推動自動駕駛的進步。特斯拉采用基于視覺感知的方案,主張通過視覺算法逐步實現全自動駕駛功能。其FSD(全自動駕駛)系統依賴于大量攝像頭、雷達以及高精度地圖,但此階段技術并未統一,廠商之間的路線分歧較大。部分廠商采用多傳感器融合技術,集成激光雷達、毫米波雷達、攝像頭等多個傳感器,試圖通過冗余感知和融合計算解決復雜場景下的障礙物識別和環境感知問題;而特斯拉則堅持純視覺路線,依靠計算機視覺技術的不斷迭代來彌補感知系統的局限。
在這一階段,高精度地圖的應用成為主流。高精度地圖通過提供詳細的道路拓撲、車道信息、交通信號等輔助駕駛系統進行決策。然而,高精度地圖存在更新周期長、覆蓋范圍有限、成本高昂等問題,使得其在復雜城市道路場景中難以滿足規模化應用的需求。
1.2 向工程型行業過渡
時間來到2022年,智能駕駛技術開始趨于成熟,逐漸由創新型行業向工程型行業轉型。特斯拉在此過程中起到了重要的引領作用。特斯拉的“BEV+Occupancy”感知架構,不僅通過鳥瞰視圖(BEV)來實現環境感知,還通過占用網絡(Occupancy Network)解決了異形障礙物的識別問題。這一技術突破使得智能駕駛系統對高精度地圖的依賴大大降低,同時增強了系統在城市復雜環境中的感知能力。
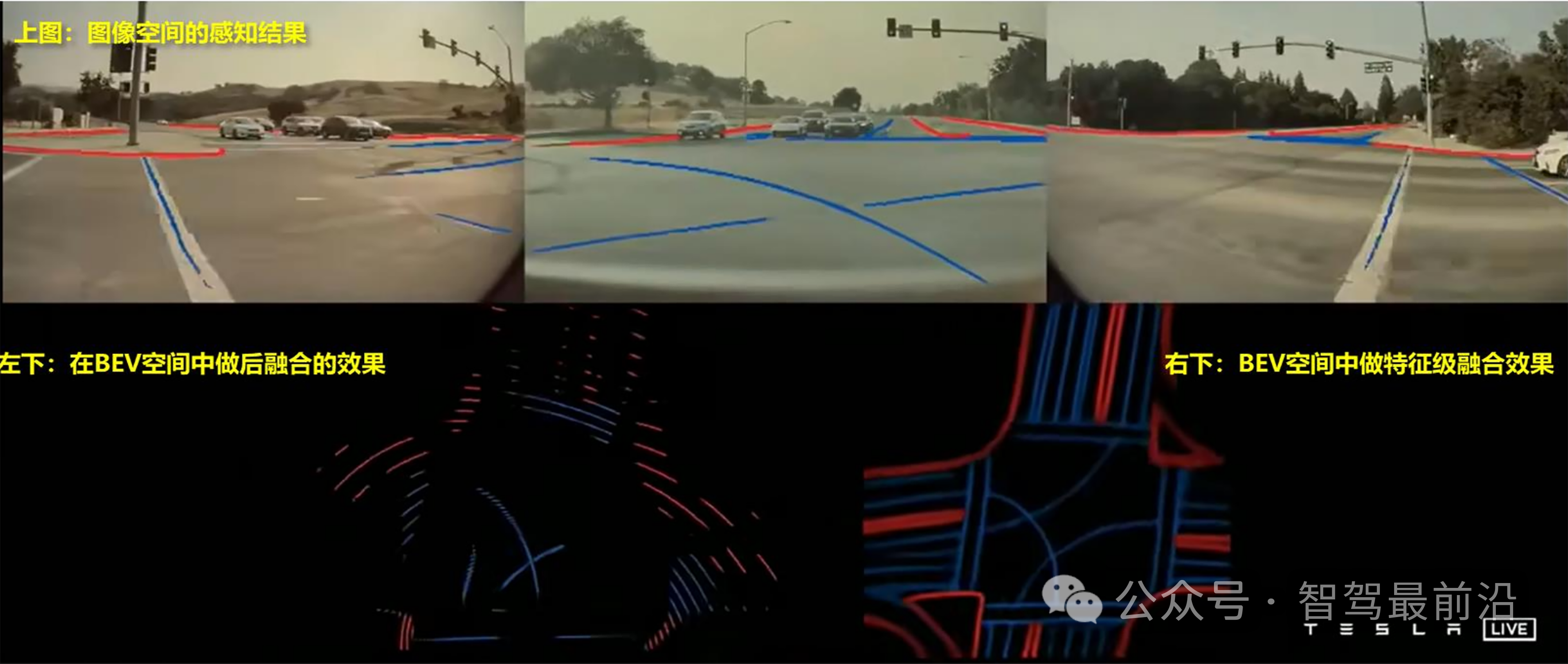
BEV感知技術大幅提高車端實時感知的精度
隨著感知技術的成熟,全球自動駕駛行業逐漸走向技術收斂,感知模塊逐步趨于一致。國內頭部廠商如小鵬、華為和理想等,也開始模仿特斯拉的技術路線,逐步減輕對高精度地圖的依賴,推動智能駕駛從高速公路NOA功能向城市NOA功能的拓展。此過程中,感知系統的算法和硬件逐步收斂,智能駕駛行業的技術路徑趨向統一。
數據閉環在智能駕駛中的重要性
2.1 數據閉環的作用
智能駕駛系統的持續進化離不開數據閉環的支持。數據閉環系統通過實時收集駕駛過程中的數據,標注和訓練新的模型,進而不斷優化感知和決策能力。特斯拉是早期實現數據閉環的典范,其通過影子模式(Shadow Mode)收集大量駕駛數據,并將數據反饋到云端進行模型訓練和優化,使得其自動駕駛系統迭代速度遠超其他廠商。
數據閉環的關鍵在于原始數據的收集、標注、仿真測試和模型訓練。在特斯拉的系統中,通過量產車收集到的數據被上傳至云端,通過大量的計算和訓練,模型不斷調整并更新,最終反饋到車端。這個過程確保了系統在不斷變化的駕駛環境中,能夠保持較高的適應性和準確性。
2.2 國內廠商的數據閉環能力
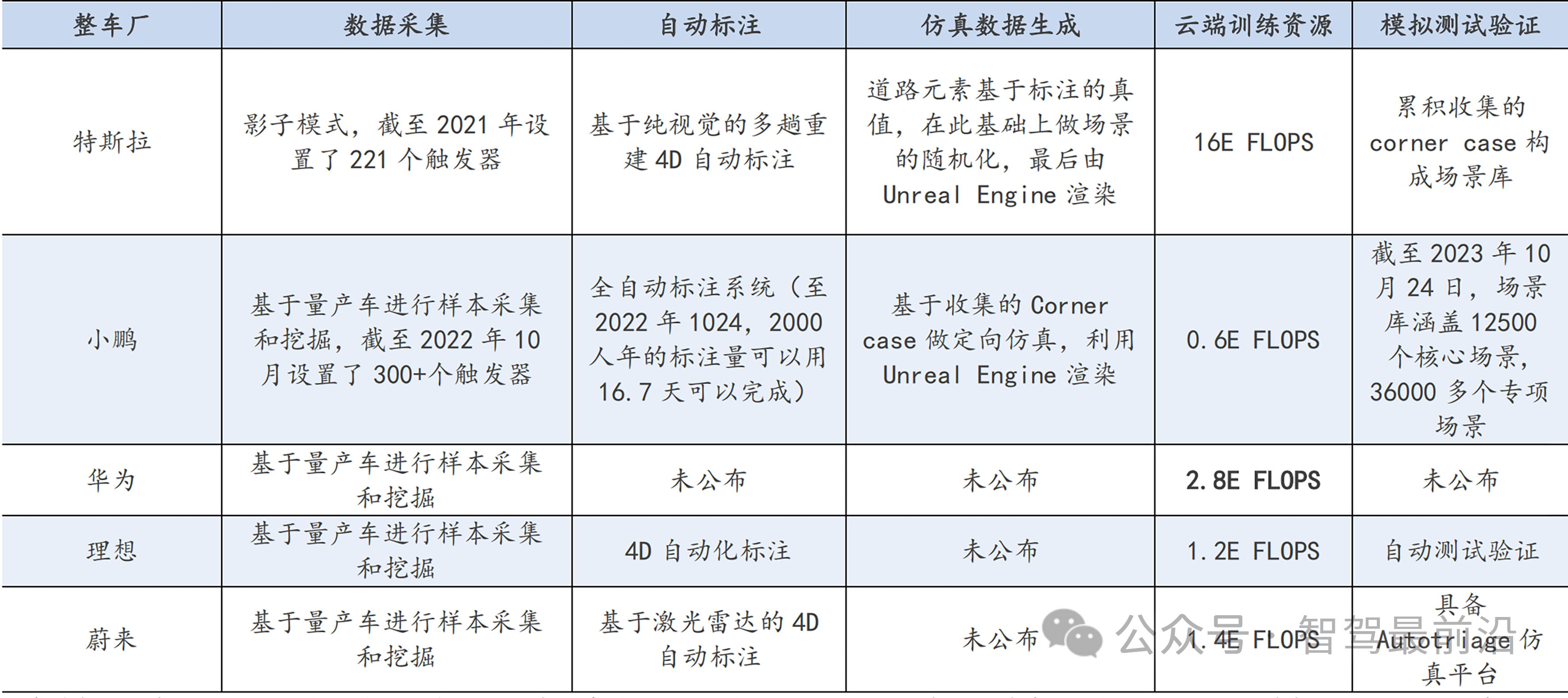
主機廠數據閉環能力對比
在國內,智能駕駛廠商如小鵬、華為、理想等也逐漸構建起了自己的數據閉環體系。以小鵬為例,2022年小鵬汽車建立了自動駕駛AI智算中心,通過與阿里云的合作,利用超算資源進行大規模仿真與數據訓練。小鵬通過量產車的數據采集系統,不斷收集各類駕駛數據,并通過云端仿真和深度學習優化模型,確保其智能駕駛系統能夠快速應對各種復雜駕駛場景。
華為則在智能駕駛的數據閉環中占據了重要地位。作為國內唯一具備全棧能力的公司,華為不僅在硬件上自主研發了車端芯片,還在云端構建了強大的算力平臺,支持海量數據的處理與分析。華為的超算中心每秒鐘可以處理數百萬公里的駕駛數據,并在五天內完成一次模型迭代,這使得華為在智能駕駛的研發中處于領先地位。
智能駕駛技術路徑的收斂與標準化
3.1 感知模塊的收斂
智能駕駛技術的收斂表現主要體現在感知模塊的標準化上。特斯拉的“BEV+Occupancy”模型成為行業的典范,基于純視覺的算法架構減少了對激光雷達等昂貴硬件的依賴,并通過深度學習技術不斷優化感知精度。隨著技術的發展,國內廠商如小鵬、華為等也逐漸采用類似的技術架構,并加快了智能駕駛系統的本地化開發和應用。
3.2 高精度地圖與輕量化地圖的應用
盡管高精度地圖在智能駕駛早期階段發揮了重要作用,但隨著技術的成熟,輕量化地圖逐漸成為新的方向。輕量化高精度地圖(如高德的HQ LIVE MAP)基于眾源數據進行制圖,具有天級更新頻率,大大提高了地圖的實時性和適應性。相較于傳統的高精度地圖,其不僅更新頻率大幅提升,而且成本也顯著降低。這一變化使得輕量化地圖成為城市NOA和通勤NOA等高階駕駛輔助功能的理想選擇。
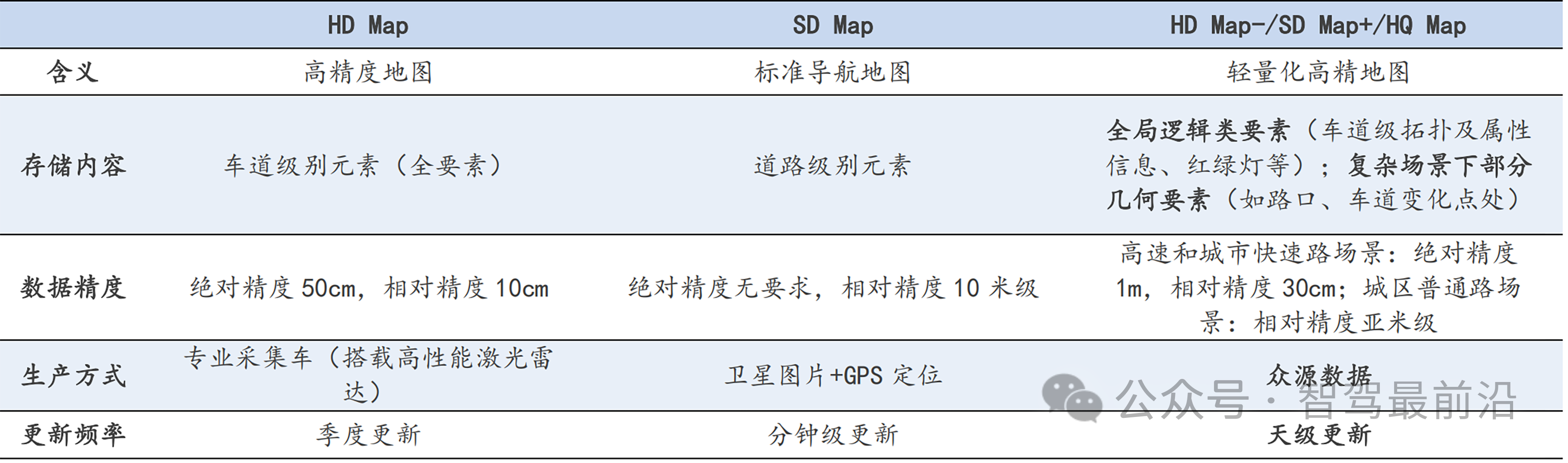
輕量化高精度地圖可以提供道路拓撲信息
主機廠的智能駕駛戰略
4.1 自研與供應商依賴的分化
隨著智能駕駛技術的推進,主機廠在智能駕駛領域的布局也出現了分化。一些頭部廠商,如小鵬、理想等,已經具備了較強的自研能力,并通過技術創新和持續投入,逐步實現智能駕駛功能的量產。小鵬的自動駕駛團隊通過強化數據閉環和高效的仿真訓練,大幅提高了系統的感知能力和決策速度,成為行業的佼佼者。
然而,另一些傳統主機廠在智能駕駛領域的自研能力較弱,更多依賴于第三方供應商提供技術支持。例如,華為與長安汽車的合作,結合華為的智能駕駛技術與長安的整車能力,共同推出了智能駕駛解決方案。這種合作模式既保證了主機廠在智能駕駛領域的技術更新,又能夠借助供應商的強大研發力量加快技術落地。
4.2 數據閉環能力與主機廠競爭力
主機廠在智能駕駛領域的競爭力直接受限于其數據閉環能力。智能駕駛的性能不僅僅依賴于感知硬件,更依賴于如何通過數據優化感知算法和決策模型。未來,具備成熟數據閉環體系和高效迭代能力的主機廠,將在市場中占據更多優勢。小鵬通過建立超算中心和加強數據采集,使其智能駕駛系統能夠更快地迭代和優化,成為行業內領先的廠商。
NOA功能的商業化與市場滲透
5.1 NOA功能的推廣
預計到2024年,城市NOA和通勤NOA的滲透率將分別達到4.2%和6.9%。這些功能的推廣將首先集中在20-30萬元價格帶的車型中,這一價格區間的車型已經成為新能源車的主戰場。隨著智能駕駛功能的逐步普及,越來越多的主機廠將會在此價格帶車型中搭載高階智能駕駛功能,以提高整車的競爭力。

預計2023年H2至2024年大量20-30萬價格帶的新車型將搭載城市/通勤NOA功能
5.2 市場滲透與主機廠策略
隨著智能駕駛技術的逐步成熟,廠商的競爭焦點將從技術領先轉向如何通過產品的差異化獲得銷量紅利。未來,頭部廠商將通過在車型中普及城市NOA功能,借此提高市場份額,并通過優化智能駕駛功能的定價、營銷等策略,提高消費者對品牌的認同感和粘性。
供應商在智能駕駛中的機會
6.1 Tier 1與Tier 2供應商的角色
隨著智能駕駛技術的推進,Tier 1和Tier 2供應商的角色愈加重要。Tier 1供應商,如英偉達、德賽西威等,正在通過提供集成的解決方案和完整的系統,幫助主機廠實現智能駕駛功能的落地。Tier 2供應商則在降低成本和提高國產化率方面發揮著重要作用,特別是在MCU、傳感器等核心元件的國產化替代方面,未來有望充分受益于這一趨勢。
結論
智能駕駛行業正在由創造型行業向工程型行業過渡。數據閉環能力、技術收斂、感知系統的標準化以及主機廠自研能力的提升,成為行業發展的關鍵驅動力。隨著2024年智能駕駛技術的快速推廣和商業化,OEM和供應商都將面臨前所未有的挑戰和機會。未來,智能駕駛不僅僅是一項技術創新,更是影響汽車產業競爭格局的戰略性力量。
審核編輯 黃宇
-
特斯拉
+關注
關注
66文章
6292瀏覽量
126460 -
雷達
+關注
關注
50文章
2897瀏覽量
117299 -
智能駕駛
+關注
關注
3文章
2451瀏覽量
48649 -
自動駕駛
+關注
關注
783文章
13682瀏覽量
166137
發布評論請先 登錄
相關推薦
東風日產與Momenta合作推出高階智駕方案
智己汽車邁入“直覺”智駕新時代
行業領導蒞臨宏景智駕考察交流
芯片行業,正在被改寫

智駕科技MAXIEYE宣布成立商用車智駕子品牌「阡途」
阿維塔:行業首個華為乾崑ADS 3.0智駕體驗正式開放
半導體制造商必須適應不斷變化的格局
宏景智駕與禾賽科技達成戰略合作 推動智駕多場景落地






 工商網監
工商網監
評論